You might also like
- FANUC 200ib Robot DescriptionDocument5 pagesFANUC 200ib Robot DescriptionAnurag KesariNo ratings yet
- Mathematical Modelling of Multirotor UAVDocument6 pagesMathematical Modelling of Multirotor UAVchernet tayeNo ratings yet
- Kinmatics Invese CalcuDocument6 pagesKinmatics Invese CalcukinfegetaNo ratings yet
- Af 65Document10 pagesAf 65he maNo ratings yet
- Methodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemDocument6 pagesMethodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemmaxamaxaNo ratings yet
- MEC 567 Kinematic Analysis and Synthesis of Mechanisms Spring 2016Document18 pagesMEC 567 Kinematic Analysis and Synthesis of Mechanisms Spring 2016anik sarkerNo ratings yet
- A Novel Approach To Head Positioning Using Fixed Center Interpolation Net With Weight Elimination AlgorithmDocument6 pagesA Novel Approach To Head Positioning Using Fixed Center Interpolation Net With Weight Elimination AlgorithmDina And OmarNo ratings yet
- S Curve AlgorithDocument8 pagesS Curve AlgorithfmjmxNo ratings yet
- Analytical Method For Velocity Analysis of Simple and Compound Mechanisms Using Simple TrigonometryDocument6 pagesAnalytical Method For Velocity Analysis of Simple and Compound Mechanisms Using Simple TrigonometryAmit MondalNo ratings yet
- Robot KinematicsDocument33 pagesRobot KinematicsengrasheedNo ratings yet
- Robust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDocument6 pagesRobust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDandro-LinkNo ratings yet
- The Spherical Four-Bar Mechanism: Optimum Synthesis With DE Algorithm and Animation Using MathematicaDocument8 pagesThe Spherical Four-Bar Mechanism: Optimum Synthesis With DE Algorithm and Animation Using Mathematicaadan25tulaNo ratings yet
- Systems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei RenDocument8 pagesSystems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei Renlahoucine1984No ratings yet
- 1 s2.0 S0307904X18304487 MainDocument19 pages1 s2.0 S0307904X18304487 MainDesign NarayanawindpowerNo ratings yet
- IJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABDocument6 pagesIJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- InTech-Robot Kinematics Forward and Inverse KinematicsDocument32 pagesInTech-Robot Kinematics Forward and Inverse KinematicsPedro DominguesNo ratings yet
- DETC2017-67126: On The Adrc of Non-Differentially Flat, Underactuated, Nonlinear Systems: An Experimental Case StudyDocument8 pagesDETC2017-67126: On The Adrc of Non-Differentially Flat, Underactuated, Nonlinear Systems: An Experimental Case StudyEfrain HernándezNo ratings yet
- A General Approach To Multiple Precesion Point Motion Generation by 4-Bar LinkageDocument25 pagesA General Approach To Multiple Precesion Point Motion Generation by 4-Bar LinkageAbhinaba MaitraNo ratings yet
- Part V: Velocity and Acceleration Analysis of Mechanisms: ME 3610 Course Notes - OutlineDocument35 pagesPart V: Velocity and Acceleration Analysis of Mechanisms: ME 3610 Course Notes - OutlineseekermohanNo ratings yet
- Short Papers: The Tricept Robot: Dynamics and Impedance ControlDocument6 pagesShort Papers: The Tricept Robot: Dynamics and Impedance ControlPrakashNo ratings yet
- Article 23Document6 pagesArticle 23hk germanNo ratings yet
- CoMeSySo.2017-WK ZB MMDocument13 pagesCoMeSySo.2017-WK ZB MMBajolNo ratings yet
- Dynamic Modelling of Differential-Drive Mobile RobotsDocument7 pagesDynamic Modelling of Differential-Drive Mobile RobotsMichael Mays100% (1)
- Dynamic Analysis of Rotor-Bearing Systems by Optimization MethodDocument7 pagesDynamic Analysis of Rotor-Bearing Systems by Optimization MethodNicoara AdrianaNo ratings yet
- Mmt12suril JourDocument22 pagesMmt12suril JourNagarjun SinghNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Dynamic Modeling of 3 Dof Robot Manipulator: Ahmet SHALA, Ramë LikajDocument4 pagesDynamic Modeling of 3 Dof Robot Manipulator: Ahmet SHALA, Ramë LikajmikeNo ratings yet
- Analysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoDocument6 pagesAnalysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoVignesh RamakrishnanNo ratings yet
- Kinematics of Machinery: Module 03 - Kinematic Synthesis Design ProcessDocument17 pagesKinematics of Machinery: Module 03 - Kinematic Synthesis Design ProcessJithin KNo ratings yet
- On Algorithms For Planning S-Curve Motion ProfilesDocument8 pagesOn Algorithms For Planning S-Curve Motion Profilessadiqaftab786No ratings yet
- General Solution For The Dynamic Modeling of Parallel RobotsDocument17 pagesGeneral Solution For The Dynamic Modeling of Parallel RobotsHuynh TLoiNo ratings yet
- Industrial Robot Models Designing and Analysis With Application of Matlab SoftwareDocument8 pagesIndustrial Robot Models Designing and Analysis With Application of Matlab SoftwareMahavir ChavdaNo ratings yet
- Inverted PendulumDocument7 pagesInverted PendulumHowlNo ratings yet
- Modeling Simulation and Position ControlDocument10 pagesModeling Simulation and Position Controlinesboumaiza293No ratings yet
- Torque Reduction For 2 Dof ManipulatorDocument5 pagesTorque Reduction For 2 Dof ManipulatorAnkit GoratelaNo ratings yet
- The Kinematics Analysis of Robotic Arm ManipulatorDocument9 pagesThe Kinematics Analysis of Robotic Arm ManipulatorJorge Adrian Lucas SanchezNo ratings yet
- AHRS LabDocument12 pagesAHRS Labjoshimeet479No ratings yet
- Asian Journal of Civil Engineering (Building and Housing) Vol. 8Document16 pagesAsian Journal of Civil Engineering (Building and Housing) Vol. 8muhammadyf100% (2)
- Modal Analysis of Mono Leaf SpringDocument7 pagesModal Analysis of Mono Leaf SpringmohanNo ratings yet
- Dynamic Analysis of Vibration Screen PDFDocument6 pagesDynamic Analysis of Vibration Screen PDFBhuvanessh RcNo ratings yet
- Dem Analysis of Vibration Screen PDFDocument6 pagesDem Analysis of Vibration Screen PDFgunajiNo ratings yet
- Two Speed Epicycle Gear TrainsDocument7 pagesTwo Speed Epicycle Gear Trainsxmtqnkn8vjNo ratings yet
- Suspension AsmeDocument24 pagesSuspension AsmeDiego MascarenhasNo ratings yet
- Modelling of The Motion of A Mecanum-Wheeled Vehicle: E. MatsinosDocument32 pagesModelling of The Motion of A Mecanum-Wheeled Vehicle: E. MatsinosyvigkNo ratings yet
- Low-Cost Arduino Based Architecture For Simulation and Control of QuadrotorsDocument6 pagesLow-Cost Arduino Based Architecture For Simulation and Control of Quadrotorshw606No ratings yet
- Analytical Approach For Kinematic Analysis of MechanismDocument13 pagesAnalytical Approach For Kinematic Analysis of MechanismShivaprasad.P100% (1)
- Dynamic Modeling of Manipulators With Symbolic Computational MethodDocument6 pagesDynamic Modeling of Manipulators With Symbolic Computational MethodMohamed AbdouNo ratings yet
- Design Optimization of Planar Mechanisms: AbstractDocument12 pagesDesign Optimization of Planar Mechanisms: AbstractInternational Journal of Engineering and TechniquesNo ratings yet
- Applications of Matrices in Everyday LifeDocument9 pagesApplications of Matrices in Everyday LifeCARLOS LEONEL BARRERA GAMBOANo ratings yet
- Dynamic Analysis and SimulationDocument5 pagesDynamic Analysis and SimulationKamel FedaouiNo ratings yet
- 42 Ijmperddec201742Document10 pages42 Ijmperddec201742TJPRC PublicationsNo ratings yet
- Mub04 Jour Pra PDFDocument21 pagesMub04 Jour Pra PDFakashpatro25No ratings yet
- Generative Modeling: A Symbolic System For Geometric ModelingDocument11 pagesGenerative Modeling: A Symbolic System For Geometric ModelingarqsergioNo ratings yet
- Inverse Kinematic Analysisof IRB120 Robot ArmDocument8 pagesInverse Kinematic Analysisof IRB120 Robot ArmBala muniyandi GNo ratings yet
- Modal Analysis For Small Satellite System With Finite Element MethodDocument5 pagesModal Analysis For Small Satellite System With Finite Element MethodAhmed Bhd100% (1)
- UNIT-IVDocument5 pagesUNIT-IVtarasasankaNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Two Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionFrom EverandTwo Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionNo ratings yet
- 3DMM CSWP 014Document1 page3DMM CSWP 014mlik borhenNo ratings yet
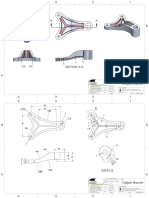
- Spring Fork HeadDocument4 pagesSpring Fork Headmlik borhenNo ratings yet
- 3DMM CSWP 037Document1 page3DMM CSWP 037mlik borhenNo ratings yet
- 3DMM CSWP 018Document1 page3DMM CSWP 018mlik borhenNo ratings yet
- 3DMM CSWP 027Document1 page3DMM CSWP 027mlik borhenNo ratings yet
- 3DMM CSWP 012Document1 page3DMM CSWP 012mlik borhenNo ratings yet
- 3DMM Dim 003Document1 page3DMM Dim 003mlik borhenNo ratings yet
- Pe01 02Document1 pagePe01 02mlik borhenNo ratings yet
- 3DMM CSWP 021Document2 pages3DMM CSWP 021mlik borhenNo ratings yet
- Editing GeometryDocument3 pagesEditing Geometrymlik borhenNo ratings yet
- Basic ExtrudeDocument2 pagesBasic Extrudemlik borhenNo ratings yet
- Solidpractices: Linear Dynamics - Concepts and Its ApplicationsDocument21 pagesSolidpractices: Linear Dynamics - Concepts and Its Applicationsmlik borhenNo ratings yet
- 3DMM CSWP 009Document2 pages3DMM CSWP 009mlik borhenNo ratings yet
- 3DMM Cswpa WD 002Document1 page3DMM Cswpa WD 002mlik borhenNo ratings yet
- 3DMM Dim 002Document2 pages3DMM Dim 002mlik borhenNo ratings yet
- 3DMM Cswpa Su 002Document1 page3DMM Cswpa Su 002mlik borhenNo ratings yet
- 3DMM Cswe 008Document2 pages3DMM Cswe 008mlik borhenNo ratings yet
- 3DMM Cswe 007Document1 page3DMM Cswe 007mlik borhenNo ratings yet
- 3DMM CSWP 038Document2 pages3DMM CSWP 038mlik borhenNo ratings yet
- 1586 - Your Second SOLIDWORKS Flow Simulation Tips, Tricks, and Frequent FeaturesDocument7 pages1586 - Your Second SOLIDWORKS Flow Simulation Tips, Tricks, and Frequent Featuresmlik borhenNo ratings yet
- 3DMM CSWP 015Document1 page3DMM CSWP 015mlik borhenNo ratings yet
- 3DMM CSWP 025Document1 page3DMM CSWP 025mlik borhenNo ratings yet
- 3DMM CSWP 005Document2 pages3DMM CSWP 005mlik borhenNo ratings yet
- 3DMM Cswa 012Document2 pages3DMM Cswa 012mlik borhenNo ratings yet
- 3DMM Cswa 001Document1 page3DMM Cswa 001mlik borhenNo ratings yet
- Solidpractices: Optimization With Solidworks Motion and MechatronicsDocument27 pagesSolidpractices: Optimization With Solidworks Motion and Mechatronicsmlik borhenNo ratings yet
- Solidpractices: Modeling Nonlinear Problems: Solidworks® SimulationDocument41 pagesSolidpractices: Modeling Nonlinear Problems: Solidworks® Simulationmlik borhenNo ratings yet
- 1738 - SOLIDWORKS CAM and CAMWorks - Getting Started With The TechDB - 1644284382372001MeARDocument5 pages1738 - SOLIDWORKS CAM and CAMWorks - Getting Started With The TechDB - 1644284382372001MeARmlik borhenNo ratings yet
- Solidpractices: Thermal Management: Using Electronics Cooling ModuleDocument14 pagesSolidpractices: Thermal Management: Using Electronics Cooling Modulemlik borhenNo ratings yet
- Advanced Boundary Cartesian Meshing Technology in Solidworks Flow SimulationDocument31 pagesAdvanced Boundary Cartesian Meshing Technology in Solidworks Flow Simulationmlik borhenNo ratings yet
- 15.6 TDS - Hlb-03-18-Cw-Al-SqDocument1 page15.6 TDS - Hlb-03-18-Cw-Al-SqGuru HbkNo ratings yet
- B A Syllabus - Malayalam U - G - Final VersionDocument144 pagesB A Syllabus - Malayalam U - G - Final VersionAaaasidhi MkNo ratings yet
- Human Respiratory System Based On Law of ThermodynamicsDocument9 pagesHuman Respiratory System Based On Law of ThermodynamicsfatimahNo ratings yet
- Cargo Operating ManualDocument309 pagesCargo Operating Manualbatizap batizap0% (1)
- Innovation Cooling Model: The Future Starts NowDocument8 pagesInnovation Cooling Model: The Future Starts NowJJNo ratings yet
- Pyranometer DELTA-T SPN1 - Datasheet - v5Document4 pagesPyranometer DELTA-T SPN1 - Datasheet - v5diCoutiNo ratings yet
- XY Power 30kW Power Module For Fast EV Charging StationsDocument2 pagesXY Power 30kW Power Module For Fast EV Charging StationsSam GuoNo ratings yet
- A-level_Physics-notesDocument44 pagesA-level_Physics-notesMuhammad HaadiNo ratings yet
- Diagrama Nissan Pinout Del ECM QR25DE 2Document17 pagesDiagrama Nissan Pinout Del ECM QR25DE 2Jose CifuentesNo ratings yet
- DT Study Guide For All UnitsDocument132 pagesDT Study Guide For All UnitsNaina Naren100% (1)
- Dakota Engine OHDocument2 pagesDakota Engine OHJujuNo ratings yet
- Standards Committee On Nuclear Quality Assurance (NQA)Document10 pagesStandards Committee On Nuclear Quality Assurance (NQA)JonNo ratings yet
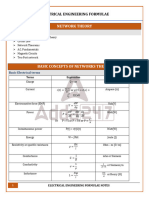
- Electrical Formula NotesDocument100 pagesElectrical Formula NotesMohit SharmaNo ratings yet
- Homework Assignment 2: Practice Solved ProblemsDocument2 pagesHomework Assignment 2: Practice Solved ProblemsJulie SummersNo ratings yet
- Welding Rod Consumption Control TemplateDocument1 pageWelding Rod Consumption Control Templatealaid melarNo ratings yet
- Performance Indices Booklet Bokpeien22Document33 pagesPerformance Indices Booklet Bokpeien22b meryemNo ratings yet
- CamScanner 02-08-2024 20.13Document19 pagesCamScanner 02-08-2024 20.13Burka DinkaNo ratings yet
- Design Simulation and Fabrication of VehicleDocument47 pagesDesign Simulation and Fabrication of VehicleSanjay karunanidhiNo ratings yet
- Physics: Zimbabwe School Examinatio S CouncilDocument10 pagesPhysics: Zimbabwe School Examinatio S CouncilLaura MkandlaNo ratings yet
- Science ArticleDocument6 pagesScience ArticleThinh NgoNo ratings yet
- BRAN LUEBBE Powermon-Compact-Ng-Folleto-TecnicoDocument2 pagesBRAN LUEBBE Powermon-Compact-Ng-Folleto-TecnicoJavierNo ratings yet
- Eee1 PDFDocument3 pagesEee1 PDFOana Daniel SergiuNo ratings yet
- HF 760 - HF 761 Series: in Line High Pressure FiltersDocument28 pagesHF 760 - HF 761 Series: in Line High Pressure FilterssitnikovsNo ratings yet
- Tata Hexa (2017-2019) Mileage (14 KML) - Hexa (2017-2019) Diesel Mileage - CarWaleDocument1 pageTata Hexa (2017-2019) Mileage (14 KML) - Hexa (2017-2019) Diesel Mileage - CarWaleMahajan VickyNo ratings yet
- Active and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingDocument6 pagesActive and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingGzam RaïfaNo ratings yet
- Lesson 1 Oscillations V 2023Document13 pagesLesson 1 Oscillations V 2023ANGELA DE LEONNo ratings yet
- 3rd Round - 2015 - Mock Nationa Exit ExamDocument20 pages3rd Round - 2015 - Mock Nationa Exit ExamteddiyfentawNo ratings yet
- E2185 - Offer RENESCO - Rev0Document39 pagesE2185 - Offer RENESCO - Rev0Umut Sinan ÇetinbaşNo ratings yet
- Kyle+Gray+ +Angelic+Protection+101+27042020Document4 pagesKyle+Gray+ +Angelic+Protection+101+27042020Elena Dombrov100% (4)
- T Tad532geDocument8 pagesT Tad532geAhmed AlabsiNo ratings yet