You might also like
- Modern CryptographyDocument18 pagesModern CryptographyAmar SawriNo ratings yet
- Salary Survey (Hong Kong) - 2022Document7 pagesSalary Survey (Hong Kong) - 2022Nathan SmithNo ratings yet
- Scalable RFID Systems: A Privacy-Preserving Protocol With Constant-Time IdentificationDocument10 pagesScalable RFID Systems: A Privacy-Preserving Protocol With Constant-Time Identificationishita084No ratings yet
- Prefix-Randomized Query-Tree Protocol For RFID Systems: Kong Wa Chiang, Cunqing Hua and Tak-Shing Peter YumDocument5 pagesPrefix-Randomized Query-Tree Protocol For RFID Systems: Kong Wa Chiang, Cunqing Hua and Tak-Shing Peter YumSatyajitMohapatraNo ratings yet
- YA-TRAP: Yet Another Trivial RFID Authentication ProtocolDocument4 pagesYA-TRAP: Yet Another Trivial RFID Authentication ProtocolManuel AlvarezNo ratings yet
- An Adaptive Memoryless Tag Anti-Collision Protocol For RFID NetworksDocument3 pagesAn Adaptive Memoryless Tag Anti-Collision Protocol For RFID Networkskinano123No ratings yet
- Xie 2019Document4 pagesXie 2019novrainNo ratings yet
- An Elliptic Curve Processor Suitable For RFID-TagsDocument17 pagesAn Elliptic Curve Processor Suitable For RFID-TagsMochamad NursidiqNo ratings yet
- CyberDocument5 pagesCyberpranavNo ratings yet
- Burmester2016.an Anonymous RFID Grouping-Proof With Missing Tag IdentificationDocument7 pagesBurmester2016.an Anonymous RFID Grouping-Proof With Missing Tag IdentificationnovrainNo ratings yet
- Formal Verification of Cryptographic Protocols SurveyDocument16 pagesFormal Verification of Cryptographic Protocols SurveyseanNo ratings yet
- Anti-Collision Algorithm For RFID TagsDocument3 pagesAnti-Collision Algorithm For RFID TagsNEO_PATELNo ratings yet
- RFID Tag Anti-Collision Protocol: Query Tree with Reversed IDs Outperforms Standard ProtocolDocument6 pagesRFID Tag Anti-Collision Protocol: Query Tree with Reversed IDs Outperforms Standard ProtocolvietbkfetNo ratings yet
- FORMA METHODS FOR CRYPTOGRAPHIC PROTOCOLDocument12 pagesFORMA METHODS FOR CRYPTOGRAPHIC PROTOCOLUsman ShehryarNo ratings yet
- Security of RFID Protocols - A Case Study: Ton Van Deursen Sa Sa Radomirovi CDocument11 pagesSecurity of RFID Protocols - A Case Study: Ton Van Deursen Sa Sa Radomirovi CRoshni Advani LalwaniNo ratings yet
- Dismantling MifareDocument18 pagesDismantling MifareAntoine EddisonNo ratings yet
- Zhang2018.Missing-Tag Detection With Presence of Unknown - TagsDocument9 pagesZhang2018.Missing-Tag Detection With Presence of Unknown - TagsnovrainNo ratings yet
- Efficient Cryptographic Protocol Design Based On Distributed El Gamal EncryptionDocument16 pagesEfficient Cryptographic Protocol Design Based On Distributed El Gamal EncryptionLuis FloresNo ratings yet
- Burmester 2009Document27 pagesBurmester 2009alexanderfortis8628No ratings yet
- Efficient Novel Anti-collision Protocols for Passive RFID TagsDocument30 pagesEfficient Novel Anti-collision Protocols for Passive RFID Tagsmonster9xNo ratings yet
- Security and Privacy Issues: Passive Attackers Are Those Who Eavesdrop On or Monitor The Communications ChannelDocument68 pagesSecurity and Privacy Issues: Passive Attackers Are Those Who Eavesdrop On or Monitor The Communications ChannelmunibhaskarNo ratings yet
- Tag-Splitting: Adaptive Collision Arbitration Protocols For RFID Tag IdentificationDocument13 pagesTag-Splitting: Adaptive Collision Arbitration Protocols For RFID Tag IdentificationSatyajitMohapatraNo ratings yet
- State of the Art in Lightweight Symmetric Cryptography SurveyDocument55 pagesState of the Art in Lightweight Symmetric Cryptography SurveyAnonymous nLSo59SNo ratings yet
- Privacy and Security in Library RFID Issues, Practices, and ArchitecturesDocument19 pagesPrivacy and Security in Library RFID Issues, Practices, and ArchitectureslegalmattersNo ratings yet
- Literature Review CryptographyDocument4 pagesLiterature Review Cryptographyikofdvbnd100% (1)
- Analysis of E-Commerce Protocols: Adapting A Traditional TechniqueDocument16 pagesAnalysis of E-Commerce Protocols: Adapting A Traditional Techniqueary_bimaNo ratings yet
- None Autoidlabs WP Hardware 049Document10 pagesNone Autoidlabs WP Hardware 049Rasool FarajiNo ratings yet
- Effective Collision Avoidance Mechanism For RFID TagsDocument5 pagesEffective Collision Avoidance Mechanism For RFID Tagsnangii2009No ratings yet
- An Empirical Study For Protecting Passive RFID Systems Against CloningDocument6 pagesAn Empirical Study For Protecting Passive RFID Systems Against CloningSelma BoumerdassiNo ratings yet
- A Composable Security Treatment of The Lightning NetworkDocument92 pagesA Composable Security Treatment of The Lightning NetworkorfeasNo ratings yet
- A Gen2-Based RFID Authentication ProtocolDocument11 pagesA Gen2-Based RFID Authentication ProtocolKarthick LakshminarayananNo ratings yet
- Colin Boyd Information Security Research Centre School of Data Communications Queensland University of Technology Brisbane Q4001 AustraliaDocument17 pagesColin Boyd Information Security Research Centre School of Data Communications Queensland University of Technology Brisbane Q4001 Australiavidhya_bineeshNo ratings yet
- Mca 302Document7 pagesMca 302logicballiaNo ratings yet
- Voting Security FullDocument18 pagesVoting Security FullThomas CarlineNo ratings yet
- PS03_2Document3 pagesPS03_2ANDREW KIMANINo ratings yet
- Text Mining Applied To Patent Mapping: A Practical Business CaseDocument8 pagesText Mining Applied To Patent Mapping: A Practical Business CasesriniefsNo ratings yet
- ArticleDocument10 pagesArticlehaticecay338No ratings yet
- Protocol Interactions May Weaken SecurityDocument13 pagesProtocol Interactions May Weaken SecurityDaniel KingsleyNo ratings yet
- A Security and Performance Analysis of Proof-Based Consensus ProtocolsDocument31 pagesA Security and Performance Analysis of Proof-Based Consensus ProtocolsbhattajagdishNo ratings yet
- Cryptology 3Document15 pagesCryptology 3api-3797177No ratings yet
- Open Issues in Formal Methods For Cryptographic Protocol AnalysisDocument17 pagesOpen Issues in Formal Methods For Cryptographic Protocol AnalysisGel ZuluetaNo ratings yet
- How To Prove Security of Communication Protocols? A Discussion On The Soundness of Formal Models W.R.T. Computational OnesDocument16 pagesHow To Prove Security of Communication Protocols? A Discussion On The Soundness of Formal Models W.R.T. Computational OnesZia Ur Rehman ZiaNo ratings yet
- ZKPoK-CompilerDocument12 pagesZKPoK-Compileryousaf_zai_khan81995100% (1)
- Scyther: Unbounded Verification of Security Protocols: Technical Report No. 572Document18 pagesScyther: Unbounded Verification of Security Protocols: Technical Report No. 572mahdi nikooghadamNo ratings yet
- RFIDDocument27 pagesRFIDAakash KumarNo ratings yet
- Implementation of Secured RFID Mutual Authethentication ProtocolDocument6 pagesImplementation of Secured RFID Mutual Authethentication ProtocolAishwarya a nairNo ratings yet
- Structure Attacks in Cryptographic ProtocolsDocument52 pagesStructure Attacks in Cryptographic ProtocolsMark D. FelicianoNo ratings yet
- A Secure ECC-based RFID Mutual Authentication Protocol For Internet of ThingsDocument14 pagesA Secure ECC-based RFID Mutual Authentication Protocol For Internet of ThingsPetter PNo ratings yet
- A Formal Security Analysis of The Signal Messaging ProtocolDocument30 pagesA Formal Security Analysis of The Signal Messaging Protocolclu5t3rNo ratings yet
- EmbeddedDocument4 pagesEmbeddedsamsath10No ratings yet
- Implementation of Secure RFID Mutual Authethentication ProtocolDocument6 pagesImplementation of Secure RFID Mutual Authethentication ProtocolAishwarya a nairNo ratings yet
- Improvement of Two Distance Bounding Protocols Against Terrorist and Force AttacksDocument8 pagesImprovement of Two Distance Bounding Protocols Against Terrorist and Force AttacksSaeed BnfNo ratings yet
- A Secure Cryptocurrency Scheme Based On PostQuantum BlockchainDocument9 pagesA Secure Cryptocurrency Scheme Based On PostQuantum BlockchainErick HernándezNo ratings yet
- Yamashita - Potential Risks of Hyperledger Fabric Smart ContractsDocument10 pagesYamashita - Potential Risks of Hyperledger Fabric Smart ContractsAndi BudiNo ratings yet
- Quantum Cryptography SeminarDocument25 pagesQuantum Cryptography SeminarFadi AkilNo ratings yet
- 2.2 Attacker Model and Security AssumptionsDocument1 page2.2 Attacker Model and Security AssumptionsRaman RNo ratings yet
- Examining How The Great Firewall Discovers Hidden Circumvention ServersDocument14 pagesExamining How The Great Firewall Discovers Hidden Circumvention Serversclu5t3rNo ratings yet
- Ouroboros Praos: An Adaptively-Secure, Semi-Synchronous Proof-Of-Stake BlockchainDocument42 pagesOuroboros Praos: An Adaptively-Secure, Semi-Synchronous Proof-Of-Stake Blockchainavichalchadha1999No ratings yet
- Time Synchronization is a critical issue for operaDocument4 pagesTime Synchronization is a critical issue for operaANJALI SNo ratings yet
- Understanding Network Hacks: Attack and Defense with Python 3From EverandUnderstanding Network Hacks: Attack and Defense with Python 3No ratings yet
- Blockchain, Cryptocurrencies and NFTs : A Practical IntroductionFrom EverandBlockchain, Cryptocurrencies and NFTs : A Practical IntroductionNo ratings yet
- RFID in The Egyptian Libraries: Case StudyDocument15 pagesRFID in The Egyptian Libraries: Case StudyWalid GradaNo ratings yet
- Project Leadership Role in an Era of ChangeDocument59 pagesProject Leadership Role in an Era of ChangeWalid GradaNo ratings yet
- RFIDTaiwan Experience PDFDocument10 pagesRFIDTaiwan Experience PDFCibyBaby PunnamparambilNo ratings yet
- RFID - The Best Technology in Supply ChainDocument7 pagesRFID - The Best Technology in Supply ChainWalid GradaNo ratings yet
- RFID in The Warehouse: A Literature Analysis (1995-2010) of Its Applications, Benefits, Challenges and Future TrendsDocument36 pagesRFID in The Warehouse: A Literature Analysis (1995-2010) of Its Applications, Benefits, Challenges and Future TrendsSanchithya AriyawanshaNo ratings yet
- Radio Frequency IdentificationDocument28 pagesRadio Frequency IdentificationWalid GradaNo ratings yet
- RFID Adoption by Supply Chain Organizations in MalaysiaDocument5 pagesRFID Adoption by Supply Chain Organizations in MalaysiaWalid GradaNo ratings yet
- RFID-based Business Process ImprovementsDocument12 pagesRFID-based Business Process ImprovementsWalid GradaNo ratings yet
- Project Management - From Simple To ComplexDocument412 pagesProject Management - From Simple To ComplexAnnette ViolaNo ratings yet
- Rfid Cost BenefitDocument78 pagesRfid Cost BenefitWalid GradaNo ratings yet
- RFID - The Best Technology in Supply ChainDocument7 pagesRFID - The Best Technology in Supply ChainWalid GradaNo ratings yet
- Managing Coordination in Global ProjectsDocument99 pagesManaging Coordination in Global ProjectsWalid GradaNo ratings yet
- New Light-Weight Crypto Algorithms For RFIDDocument4 pagesNew Light-Weight Crypto Algorithms For RFIDWalid GradaNo ratings yet
- RFID and Identity ManagementDocument94 pagesRFID and Identity ManagementWalid GradaNo ratings yet
- Software Project's Complexity Measurement: A Case Study: Panos Fitsilis, Vyron DamasiotisDocument8 pagesSoftware Project's Complexity Measurement: A Case Study: Panos Fitsilis, Vyron DamasiotisWalid GradaNo ratings yet
- Impact of RFID in RetailDocument18 pagesImpact of RFID in Retailbhar4tpNo ratings yet
- Otmc 5 1 10 WebDocument17 pagesOtmc 5 1 10 WebSushmit SharmaNo ratings yet
- Factors A Ecting Radio Frequency IdentifcationDocument14 pagesFactors A Ecting Radio Frequency IdentifcationWalid GradaNo ratings yet
- A Novel Mutual RFID Authentication ProtocolDocument9 pagesA Novel Mutual RFID Authentication ProtocolWalid GradaNo ratings yet
- Collaborative RiskDocument88 pagesCollaborative RiskWalid GradaNo ratings yet
- How RFID Technology Improves Library Management and Patron SatisfactionDocument62 pagesHow RFID Technology Improves Library Management and Patron SatisfactionArmando AmarNo ratings yet
- Erfarenheter Från FinlandDocument55 pagesErfarenheter Från FinlandWalid GradaNo ratings yet
- Technological Attributes That Influence RFID Adoption in LogisticsDocument10 pagesTechnological Attributes That Influence RFID Adoption in LogisticsWalid GradaNo ratings yet
- In Search of The Radio FrequencyDocument266 pagesIn Search of The Radio FrequencyWalid GradaNo ratings yet
- Feasibility and Applications of Rfid TechnologiesDocument116 pagesFeasibility and Applications of Rfid TechnologiesWalid GradaNo ratings yet
- New Light-Weight Crypto Algorithms For RFIDDocument4 pagesNew Light-Weight Crypto Algorithms For RFIDWalid GradaNo ratings yet
- The Role of Metaphors in Collective Meaning-Making in ComplexDocument20 pagesThe Role of Metaphors in Collective Meaning-Making in ComplexWalid GradaNo ratings yet
- Efficient ASIC Implementation and Analysis ofDocument11 pagesEfficient ASIC Implementation and Analysis ofWalid GradaNo ratings yet
- RFID and Identity ManagementDocument94 pagesRFID and Identity ManagementWalid GradaNo ratings yet
- Case Study: The ClientDocument2 pagesCase Study: The ClientWalid GradaNo ratings yet
- Latin Fathers On Spirit PDFDocument20 pagesLatin Fathers On Spirit PDFZakka LabibNo ratings yet
- 0000 0000 0335Document40 pages0000 0000 0335Hari SetiawanNo ratings yet
- Session 7 Valuation of ITC Using DDMDocument24 pagesSession 7 Valuation of ITC Using DDMSnehil BajpaiNo ratings yet
- Cazul Cyril Burt 3Document3 pagesCazul Cyril Burt 3Cosmina MihaelaNo ratings yet
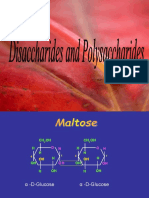
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- NB-CPR 17-722r8 - General Guidance On AVCP (Working Copy)Document25 pagesNB-CPR 17-722r8 - General Guidance On AVCP (Working Copy)halexing5957No ratings yet
- Madhwacharya ' S Lineage - "GURU CHARITE"Document136 pagesMadhwacharya ' S Lineage - "GURU CHARITE"Srivatsa100% (4)
- Country/Airport City Laboratory: AfghanistanDocument25 pagesCountry/Airport City Laboratory: AfghanistanLudovic DumitruNo ratings yet
- Ali, B.H., Al Wabel, N., Blunden, G., 2005Document8 pagesAli, B.H., Al Wabel, N., Blunden, G., 2005Herzan MarjawanNo ratings yet
- Audit of Intangible AssetDocument3 pagesAudit of Intangible Assetd.pagkatoytoyNo ratings yet
- India's Fertilizer IndustryDocument15 pagesIndia's Fertilizer Industrydevika20No ratings yet
- Cost MGMT Accounting U4Document74 pagesCost MGMT Accounting U4Kai KeatNo ratings yet
- IED670 - A Major Leap in Grid ReliabilityDocument2 pagesIED670 - A Major Leap in Grid ReliabilityunorulezNo ratings yet
- Nursing Health History SummaryDocument1 pageNursing Health History SummaryHarvey T. Dato-onNo ratings yet
- Nurses' Knowledge and Practice For Prevention of Infection in Burn Unit at A University Hospital: Suggested Nursing GuidelinesDocument8 pagesNurses' Knowledge and Practice For Prevention of Infection in Burn Unit at A University Hospital: Suggested Nursing GuidelinesIOSRjournalNo ratings yet
- Connected Topological Spaces: Definition 3.1.1Document22 pagesConnected Topological Spaces: Definition 3.1.1WilmerAlexanderVivasNogueraNo ratings yet
- Body Condition Scoring of Dairy Cattle A Review - 2 PDFDocument8 pagesBody Condition Scoring of Dairy Cattle A Review - 2 PDFfrankyNo ratings yet
- How To Write A Perfect Story For The Cambridge b1 (Preliminary) - Free PDF With Example Questions - Intercambio Idiomas OnlineDocument5 pagesHow To Write A Perfect Story For The Cambridge b1 (Preliminary) - Free PDF With Example Questions - Intercambio Idiomas OnlineAbd Fattah JamaluddinNo ratings yet
- Understanding the Role of Criminologists in Third World CountriesDocument4 pagesUnderstanding the Role of Criminologists in Third World Countriespaco kazunguNo ratings yet
- Media ExercisesDocument24 pagesMedia ExercisesMary SyvakNo ratings yet
- Product Brand Management 427 v1Document484 pagesProduct Brand Management 427 v1Adii AdityaNo ratings yet
- Coding and Decoding Practice TestDocument13 pagesCoding and Decoding Practice TestRaja SubramanianNo ratings yet
- Information Pack: Creative Media EducationDocument26 pagesInformation Pack: Creative Media EducationDaniel VladimirovNo ratings yet
- Quantum Dot PDFDocument22 pagesQuantum Dot PDFALI ASHRAFNo ratings yet
- RGB PDFDocument35 pagesRGB PDFGestion Medios Zamba ColorsNo ratings yet
- Faith Surah RefutationDocument9 pagesFaith Surah RefutationKhairul Anuar Mohd IsaNo ratings yet
- A Meta Analysis of Effectiveness of Interventions To I - 2018 - International JoDocument12 pagesA Meta Analysis of Effectiveness of Interventions To I - 2018 - International JoSansa LauraNo ratings yet
- Tentech MTD20KWe Digital Earth Tester Users Guide ManualDocument45 pagesTentech MTD20KWe Digital Earth Tester Users Guide ManualAnonymous voVeDickM100% (1)
- EngM6 TB WebDocument161 pagesEngM6 TB WebNong BillNo ratings yet