You might also like
- Achievement Test U8 (Reading & Vocab)Document3 pagesAchievement Test U8 (Reading & Vocab)Bùi Thị Huỳnh Trâm100% (3)
- Lara Full Course ContentDocument5 pagesLara Full Course Contentshan_reddyNo ratings yet
- Aqa 7041 7042 SP 2015 PDFDocument86 pagesAqa 7041 7042 SP 2015 PDFEleni Hannam0% (1)
- Shortcuts in Esthetic DentistryDocument1 pageShortcuts in Esthetic DentistryGabriel Lazar100% (1)
- Feynman Path Integrals in Curved Spaces: Bruce DriverDocument33 pagesFeynman Path Integrals in Curved Spaces: Bruce DriverAhmed BougheraraNo ratings yet
- Chan Ortiz - HW4 PDFDocument18 pagesChan Ortiz - HW4 PDFNator17No ratings yet
- Robotdynamics PDFDocument53 pagesRobotdynamics PDFJaimon CletusNo ratings yet
- Homework 5: AnswerDocument23 pagesHomework 5: AnswerNator17No ratings yet
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDocument4 pages2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNo ratings yet
- Module 3 PDFDocument3 pagesModule 3 PDFCarlosMartzBNo ratings yet
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNo ratings yet
- Univariate Unit Root Processes: Iid 2 T T 1 T TDocument10 pagesUnivariate Unit Root Processes: Iid 2 T T 1 T Tsmazadamha sulaimanNo ratings yet
- 16 Lecture 17. Lagrange's Case: 16.1 The Symmetric TopDocument5 pages16 Lecture 17. Lagrange's Case: 16.1 The Symmetric TopJaglulHasanJoyNo ratings yet
- Fall 2011Document2 pagesFall 2011Robinson Ortega MezaNo ratings yet
- Adding SwingDocument3 pagesAdding SwingmozesdeheiligeNo ratings yet
- Ec19303-Signals and SytemsDocument15 pagesEc19303-Signals and SytemsBENAZIR BEGAM RNo ratings yet
- QK Contacts With Non-Informed People. at Time T, It Is: DT N NDocument15 pagesQK Contacts With Non-Informed People. at Time T, It Is: DT N NAnonymous 3J1EvGNo ratings yet
- Wave Equation DerivationDocument1 pageWave Equation DerivationRaghuRamNo ratings yet
- AMATH 231 Calculus IV Solutions A4Document6 pagesAMATH 231 Calculus IV Solutions A4Forsen ShungiteNo ratings yet
- 8 HandoutDocument5 pages8 Handoutaladar520No ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- Useful Formulae: x + γx˙ + ω x = fDocument4 pagesUseful Formulae: x + γx˙ + ω x = fjecabuzzNo ratings yet
- Assignment 2 Continuum Mechanics (4MT317) 2019: J J J J JDocument3 pagesAssignment 2 Continuum Mechanics (4MT317) 2019: J J J J JElvir PecoNo ratings yet
- Fourth Order Runge-Kutta-Step-By-Step PDFDocument12 pagesFourth Order Runge-Kutta-Step-By-Step PDFMetinNo ratings yet
- Homework8 AnsDocument3 pagesHomework8 AnsAshok ThiruvengadamNo ratings yet
- I / & P Á Þ o Æ I (MATH161) :, 0) X+ y 1, X 0, y 0. Ydy Xtan X X + Sec X, - X - 1Document3 pagesI / & P Á Þ o Æ I (MATH161) :, 0) X+ y 1, X 0, y 0. Ydy Xtan X X + Sec X, - X - 1서정민No ratings yet
- Math 201 Lecture 12: Cauchy-Euler EquationsDocument8 pagesMath 201 Lecture 12: Cauchy-Euler EquationsPlease ScribdNo ratings yet
- Part2 PDFDocument136 pagesPart2 PDFIntan nur alfiahNo ratings yet
- Exam2 SolutionsDocument5 pagesExam2 SolutionsabayteshomeNo ratings yet
- 65cc56b8e7b7e10018a106bf - ## - Projectile Motion Short Notes JEE Ultimate Crash Course 2.0 2024Document2 pages65cc56b8e7b7e10018a106bf - ## - Projectile Motion Short Notes JEE Ultimate Crash Course 2.0 2024Krishanveer SinghNo ratings yet
- Final PDFDocument13 pagesFinal PDFAlexandre Magno Bernardo FontouraNo ratings yet
- Solutions Shreve Chapter 5Document6 pagesSolutions Shreve Chapter 5SemenCollectorNo ratings yet
- Math221: HW# 2 Solutions: Andy Royston October 12, 2005Document12 pagesMath221: HW# 2 Solutions: Andy Royston October 12, 2005Zahid KumailNo ratings yet
- Supplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyDocument6 pagesSupplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyMichelle Ann OrendainNo ratings yet
- Motion in A Straight LineDocument2 pagesMotion in A Straight Linekpmhydro10No ratings yet
- The Maxwell Models: Hooke's Law For Elastic SolidsDocument7 pagesThe Maxwell Models: Hooke's Law For Elastic Solidsrody87No ratings yet
- Matched FilterDocument2 pagesMatched Filter朱柏林No ratings yet
- !!en3 The Fourier Transform v02Document8 pages!!en3 The Fourier Transform v02Marcela DobreNo ratings yet
- Unit V 1D Steady State Heat Transfer Through Plane Wall - Composite Wall PDFDocument30 pagesUnit V 1D Steady State Heat Transfer Through Plane Wall - Composite Wall PDFMannam Sarath SarathNo ratings yet
- 0108 Ja P#1&2 HSDocument12 pages0108 Ja P#1&2 HSMann DoshiNo ratings yet
- Lecture 14Document8 pagesLecture 14Aram ShojaeiNo ratings yet
- Poisson PDFDocument46 pagesPoisson PDFjozsefNo ratings yet
- Chapter 6Document8 pagesChapter 6StefanPerendijaNo ratings yet
- 3 Methods of Finding Estimators: 3.1 SubstitutionDocument12 pages3 Methods of Finding Estimators: 3.1 SubstitutionlzcNo ratings yet
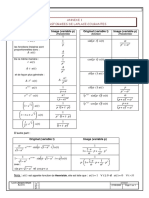
- T U P A P: Annexe 1 Transformees de Laplace CourantesDocument1 pageT U P A P: Annexe 1 Transformees de Laplace CourantesPierre DIAMANE SENGHORNo ratings yet
- Fourier's Law: Module 2: Steady-State Heat ConductionDocument3 pagesFourier's Law: Module 2: Steady-State Heat ConductionJohnAdistubNo ratings yet
- Fourier's Law: Module 2: Steady-State Heat ConductionDocument3 pagesFourier's Law: Module 2: Steady-State Heat ConductionJohnAdistubNo ratings yet
- Fourier's Law: Module 2: Steady-State Heat ConductionDocument3 pagesFourier's Law: Module 2: Steady-State Heat ConductionJohnAdistubNo ratings yet
- Exam 2 Cheat SheetDocument3 pagesExam 2 Cheat SheetMac JonesNo ratings yet
- MATH 571 Mathematical Models of Financial Derivatives: Homework FourDocument5 pagesMATH 571 Mathematical Models of Financial Derivatives: Homework FourFarhan SarwarNo ratings yet
- AMM12362Document1 pageAMM12362이건행No ratings yet
- Finansmatte FSDocument1 pageFinansmatte FSGustav HägglundNo ratings yet
- Review of Transforms: ECGR 6118 Computer Project: Transforms Student NameDocument25 pagesReview of Transforms: ECGR 6118 Computer Project: Transforms Student NameRyan HillNo ratings yet
- Adc 3Document7 pagesAdc 3moondipti39No ratings yet
- Math 2280 - Assignment 10: Dylan Zwick Spring 2014Document19 pagesMath 2280 - Assignment 10: Dylan Zwick Spring 2014Bree ElaineNo ratings yet
- Midterm CheatsheetDocument3 pagesMidterm CheatsheetJoel Tan Yi JieNo ratings yet
- FluidmechanicsDocument62 pagesFluidmechanicsNadiaa AdjoviNo ratings yet
- Answers For Recurrence ProblemsDocument1 pageAnswers For Recurrence ProblemsdfdfdfNo ratings yet
- Formulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Document11 pagesFormulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Bader AlShakhatrahNo ratings yet
- 2011-02-Elliptic Functions - Theta Functions Contd PDFDocument6 pages2011-02-Elliptic Functions - Theta Functions Contd PDFdawson zhaoNo ratings yet
- Exam 2 FormulaDocument4 pagesExam 2 Formulatapanmukhopadhyay066No ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Solvability, Controllability, and Observability of Singular SystemsDocument20 pagesSolvability, Controllability, and Observability of Singular SystemsjavbejaranoNo ratings yet
- Unknown Input Observer For State Affine Systems A Necessary and Sufficient ConditionDocument8 pagesUnknown Input Observer For State Affine Systems A Necessary and Sufficient ConditionjavbejaranoNo ratings yet
- Stability Conditions For Integral Delay Systems: Daniel Melchor-Aguilar, Vladimir Kharitonov and Rogelio LozanoDocument15 pagesStability Conditions For Integral Delay Systems: Daniel Melchor-Aguilar, Vladimir Kharitonov and Rogelio LozanojavbejaranoNo ratings yet
- Output-Feedback Control of Container Cranes: A Comparative AnalysisDocument16 pagesOutput-Feedback Control of Container Cranes: A Comparative AnalysisjavbejaranoNo ratings yet
- Second-Order Sliding-Mode Control of Container Cranes: Brief Paper Giorgio Bartolini, Alessandro Pisano, Elio UsaiDocument8 pagesSecond-Order Sliding-Mode Control of Container Cranes: Brief Paper Giorgio Bartolini, Alessandro Pisano, Elio UsaijavbejaranoNo ratings yet
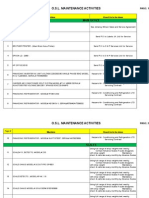
- AMC Process in Plant Maintenance: Kalyan ChakravarthiDocument9 pagesAMC Process in Plant Maintenance: Kalyan Chakravarthivadiraj tanjoreNo ratings yet
- 10 Warnings About Windows Home Server - For DummiesDocument1 page10 Warnings About Windows Home Server - For DummiesGwyneth ZablanNo ratings yet
- Transformer Life ManagementDocument20 pagesTransformer Life ManagementwiyatnoNo ratings yet
- The Key Concepts of Al-Farghån 'S Commentary On Ibn Al-Fåri 'S Sufi Poem, Al-Tå Iyyat Al-KubråDocument52 pagesThe Key Concepts of Al-Farghån 'S Commentary On Ibn Al-Fåri 'S Sufi Poem, Al-Tå Iyyat Al-KubråTur111No ratings yet
- Building Restful Web Apis With Node - JS, Express, Mongodb and Typescript DocumentationDocument33 pagesBuilding Restful Web Apis With Node - JS, Express, Mongodb and Typescript Documentationfuck youNo ratings yet
- Residual DepositsDocument3 pagesResidual Depositsyosia luther100% (1)
- Draft Cost Accounting and Control SyllabusDocument7 pagesDraft Cost Accounting and Control SyllabusBen TennysonNo ratings yet
- Single-Cell-ProteinDocument11 pagesSingle-Cell-ProteinKhalid AbduNo ratings yet
- Personality and Individual Differences: A B B BDocument8 pagesPersonality and Individual Differences: A B B BLygia CabusNo ratings yet
- ColDocument9 pagesColpieterinpretoria391No ratings yet
- AlgaeDocument9 pagesAlgaeapi-3731257No ratings yet
- AI Literacy - Towards Measuring Human Competency in Artificial IntelligenceDocument10 pagesAI Literacy - Towards Measuring Human Competency in Artificial IntelligenceIris ZhuNo ratings yet
- ACPDocument4 pagesACPHitesh N. PanchalNo ratings yet
- Abramson - Inmon Vs KimballDocument32 pagesAbramson - Inmon Vs Kimballrespinosamilla100% (3)
- Catalogue ParafoudresDocument15 pagesCatalogue ParafoudresKDANo ratings yet
- BMI EhtiopiaDocument42 pagesBMI EhtiopiaHemanth RaoNo ratings yet
- Print - Udyam Registration CertificateDocument2 pagesPrint - Udyam Registration Certificatenitesh.rfwdNo ratings yet
- Dynamics of Rigid Bodies: Work and EnergyDocument11 pagesDynamics of Rigid Bodies: Work and EnergyJancis TugadeNo ratings yet
- Module 2 - RLC CircuitsDocument49 pagesModule 2 - RLC CircuitsPao CastillonNo ratings yet
- Profile 2Document1 pageProfile 2api-314646235No ratings yet
- Tendernotice - 1 - 2023-12-09T095648.933Document2 pagesTendernotice - 1 - 2023-12-09T095648.933MJ GROUPNo ratings yet
- CAAP 5.14-1 (0) Appendix C Sample Briefings v2.3Document138 pagesCAAP 5.14-1 (0) Appendix C Sample Briefings v2.3davidobrienNo ratings yet
- Early Journal Content On JSTOR, Free To Anyone in The WorldDocument4 pagesEarly Journal Content On JSTOR, Free To Anyone in The WorldNeluNo ratings yet
- Certificate of Compliance: Certificate Number Report Reference Issue DateDocument1 pageCertificate of Compliance: Certificate Number Report Reference Issue DateJohn Armely Arias GuerreroNo ratings yet
- AnnuallyDocument70 pagesAnnuallyFloreidNo ratings yet
- Pas 1Document1 pagePas 1Elisha ENo ratings yet