You might also like
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Gopal Gupta 2K20PES09-1Document18 pagesGopal Gupta 2K20PES09-1Kritu Gupta100% (1)
- Gopal Gupta 2K20PES09Document23 pagesGopal Gupta 2K20PES09Kritu GuptaNo ratings yet
- ED Lectures Unit-1Document81 pagesED Lectures Unit-1Jeet DattaNo ratings yet
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocument14 pagesBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteNo ratings yet
- Gopal Gupta 2K20PES09 SignedDocument23 pagesGopal Gupta 2K20PES09 SignedKritu GuptaNo ratings yet
- Power ElectronicsDocument4 pagesPower Electronicsanwita.basakNo ratings yet
- Implementation of Chopper Fed Speed Control of Sep PDFDocument6 pagesImplementation of Chopper Fed Speed Control of Sep PDFDayguel EvansNo ratings yet
- Electrical DrivesDocument191 pagesElectrical Drivesbangs34No ratings yet
- Case StudyDocument3 pagesCase StudyRogelio AquinoNo ratings yet
- EHV - Mod 3Document36 pagesEHV - Mod 3vdjfvhvNo ratings yet
- Buck ConverterDocument4 pagesBuck ConverterPulkit BucchaNo ratings yet
- Single Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghDocument14 pagesSingle Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghTJPRC PublicationsNo ratings yet
- Separately Excited DC Motor Speed Control Using Four Quadrant ChopperDocument3 pagesSeparately Excited DC Motor Speed Control Using Four Quadrant ChopperJay S PatelNo ratings yet
- Speed Control of Brushless DC Motor Using Zeta ConverterDocument7 pagesSpeed Control of Brushless DC Motor Using Zeta ConverterRicard Alfredo PurbaNo ratings yet
- A Report On: Subject T.E. Electrical 2 Shift 2018-2019 Made byDocument5 pagesA Report On: Subject T.E. Electrical 2 Shift 2018-2019 Made bySAHILNo ratings yet
- Electrical DrivesDocument194 pagesElectrical DrivesKITSAO SAMUELNo ratings yet
- Implementation of Boost Converter Applied For DC Motor DriveDocument51 pagesImplementation of Boost Converter Applied For DC Motor DriveLeri FirdianNo ratings yet
- Performance Analysis of Three Phase Full Bridge Converter Controlled DC MotorDocument45 pagesPerformance Analysis of Three Phase Full Bridge Converter Controlled DC Motoranon_451051243No ratings yet
- Analysis and Design of BLDC Motor Control in Regenerative BrakingDocument5 pagesAnalysis and Design of BLDC Motor Control in Regenerative BrakingDEBARATI DAMNo ratings yet
- Regenerative Current Control Method of BidirectionDocument10 pagesRegenerative Current Control Method of BidirectionMinh VõNo ratings yet
- Thesis On Boost ConverterDocument31 pagesThesis On Boost ConverterArpan SahaNo ratings yet
- 3-Starting and Braking, Introduction To DC Motors-19-01-2024Document35 pages3-Starting and Braking, Introduction To DC Motors-19-01-2024AYUSH GOYALNo ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- Development of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IDocument4 pagesDevelopment of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IKapish SharmaNo ratings yet
- Electrical DrivesDocument204 pagesElectrical DrivesRuchiNo ratings yet
- 5695 45 165 DC Motor Speed Control Using Magnetic AmplifierDocument8 pages5695 45 165 DC Motor Speed Control Using Magnetic AmplifierNexus GoddNo ratings yet
- Design and Development of Controller For Electric VehicleDocument4 pagesDesign and Development of Controller For Electric VehicleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Solid State Drives Digital NotesDocument195 pagesSolid State Drives Digital NotesShanmukh VegiNo ratings yet
- Energy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfDocument6 pagesEnergy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfkannanNo ratings yet
- Electrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Document83 pagesElectrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Thivya PrasadNo ratings yet
- Idc - Sem-07 PDFDocument67 pagesIdc - Sem-07 PDFNitin PrajapatiNo ratings yet
- Electric MachinesDocument4 pagesElectric Machinesمحمد حسین فیض اللهیNo ratings yet
- UNIT 4 FinalDocument13 pagesUNIT 4 FinalmahisreehithaNo ratings yet
- Experimental Verification of Regenerative Braking Characteristics by Applying Different Motor Armature VoltageDocument4 pagesExperimental Verification of Regenerative Braking Characteristics by Applying Different Motor Armature VoltagekpenteyssNo ratings yet
- DC Chop - Final ReportDocument36 pagesDC Chop - Final ReportReeta DuttaNo ratings yet
- Batch 2Document13 pagesBatch 2Rajesh NadipalliNo ratings yet
- Assessment of BLDC Motor For EV Application Considering Vehicle Design StrategyDocument7 pagesAssessment of BLDC Motor For EV Application Considering Vehicle Design StrategyPremier PublishersNo ratings yet
- Chopper Operation Using PsimDocument7 pagesChopper Operation Using PsimhusseinNo ratings yet
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- Electric Vehicle 4th ModuleDocument13 pagesElectric Vehicle 4th ModuleAmruth DeshpandeNo ratings yet
- DCto DCBoost Converterusing 555 Timer ICDocument7 pagesDCto DCBoost Converterusing 555 Timer ICengpower20m196No ratings yet
- Modelling and Simulation Speed Control of DC Motor Using PSIMDocument9 pagesModelling and Simulation Speed Control of DC Motor Using PSIMمحمد العراقيNo ratings yet
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document11 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Aslam MohammadNo ratings yet
- Brushless DC Electric Motor Speed Control and Power Factor Correction Using Single Ended Primary Inductor ConverterDocument9 pagesBrushless DC Electric Motor Speed Control and Power Factor Correction Using Single Ended Primary Inductor ConverterAlvaajid SaleemNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor by Using Cascaded H-Bridge Multilevel InverterDocument52 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor by Using Cascaded H-Bridge Multilevel Inverterharish100% (1)
- Speed Control of DC Motor Using Chopper: Abhishek Kumar Sinha (109ee0309) Badal Kumar Sethy (109ee0304)Document42 pagesSpeed Control of DC Motor Using Chopper: Abhishek Kumar Sinha (109ee0309) Badal Kumar Sethy (109ee0304)rijilpoothadiNo ratings yet
- AC Versus DC in Crane Modernisation Projects: ORT Echnology NternationalDocument3 pagesAC Versus DC in Crane Modernisation Projects: ORT Echnology NternationalDedy AlfNo ratings yet
- Mehrdad Kazerani On 2010-10-19Document622 pagesMehrdad Kazerani On 2010-10-19Jagdip ShethNo ratings yet
- Regenerative Hybrid Automobile ReportDocument67 pagesRegenerative Hybrid Automobile ReportRajat KapoorNo ratings yet
- Brushless DC MotorDocument17 pagesBrushless DC Motorkrishna015100% (1)
- Electric Drives ControlDocument29 pagesElectric Drives ControlNebyou DanielNo ratings yet
- Conventional Ic Engine To BLDC Powered Electric Motorcycle Conversion E MotorcycleDocument6 pagesConventional Ic Engine To BLDC Powered Electric Motorcycle Conversion E MotorcycleAndrey MantaNo ratings yet
- DGAEJ-Uzma PaperDocument20 pagesDGAEJ-Uzma PaperFARHAD ILAHI BakhshNo ratings yet
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 pagesDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariNo ratings yet
- Programmable Mechanical Motor Loading Unit Using A DC MotorDocument5 pagesProgrammable Mechanical Motor Loading Unit Using A DC MotorFaqih DwiNo ratings yet
- Synopsis: Study and Development of E-Bike ChargerDocument13 pagesSynopsis: Study and Development of E-Bike ChargerRUMI SINGHNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Electrical Drives UNIT-3: Vii Semester ETEE-401Document163 pagesElectrical Drives UNIT-3: Vii Semester ETEE-401Jeet DattaNo ratings yet
- ED Lectures Unit-4Document119 pagesED Lectures Unit-4Jeet DattaNo ratings yet
- Nakajima 2020Document2 pagesNakajima 2020Jeet DattaNo ratings yet
- Nonverbal Communication: Made By-Drishti HansDocument6 pagesNonverbal Communication: Made By-Drishti HansJeet DattaNo ratings yet
- Globalink Research Internship CV June2016Document1 pageGlobalink Research Internship CV June2016Jeet DattaNo ratings yet
- Installation Manual MSDAC DACF-730P V2.6Document128 pagesInstallation Manual MSDAC DACF-730P V2.6Jeet DattaNo ratings yet
- Ssdac Dacf-710p ManualDocument163 pagesSsdac Dacf-710p ManualJeet DattaNo ratings yet
- Bottom Hole PressureDocument30 pagesBottom Hole PressuredinoNo ratings yet
- Inductance, Inductive Reactance, and Inductive Circuits Inductance, Inductive Reactance, and Inductive CircuitsDocument51 pagesInductance, Inductive Reactance, and Inductive Circuits Inductance, Inductive Reactance, and Inductive CircuitsKareen Chua0% (1)
- 9 PD Measurement On CablesDocument17 pages9 PD Measurement On CablesTXEMANo ratings yet
- Nafyad N 2 High School Physics Midd Exam For Grade 10Document2 pagesNafyad N 2 High School Physics Midd Exam For Grade 10Kebede TeseNo ratings yet
- Practice Exercise 2.2 - Conversion of UnitsDocument2 pagesPractice Exercise 2.2 - Conversion of UnitsChacha MontemayorNo ratings yet
- SUMMARY of HEAT ENERGY Grade 7Document2 pagesSUMMARY of HEAT ENERGY Grade 7yopy metzNo ratings yet
- 1cm To 6kmDocument5 pages1cm To 6kmFekir ZelekeNo ratings yet
- WaxatuwufafosipotuzezuDocument21 pagesWaxatuwufafosipotuzezuSong Ze OngNo ratings yet
- Work Energy PowerDocument4 pagesWork Energy PowerVincent MedinaNo ratings yet
- CMT Laboratory 7 Specific Gravity of Coarse AggregatesDocument6 pagesCMT Laboratory 7 Specific Gravity of Coarse AggregatesBryanHarold BrooNo ratings yet
- Module-1-FLUID PROPERTIESDocument7 pagesModule-1-FLUID PROPERTIESFerry CaballasNo ratings yet
- Example 2 - Top PerformersDocument20 pagesExample 2 - Top PerformersHenry LauNo ratings yet
- Experiment 7 INtro, OBjective TazihanDocument6 pagesExperiment 7 INtro, OBjective TazihanFredo AreroNo ratings yet
- Basic Elictrical Engineering (SSW)Document6 pagesBasic Elictrical Engineering (SSW)Earl John Andrij TorregosaNo ratings yet
- Q1 - Week 9.2 - ELECTRICITYDocument94 pagesQ1 - Week 9.2 - ELECTRICITYGenel YutucNo ratings yet
- Learning+mtrl+6+gen Chem+2Document10 pagesLearning+mtrl+6+gen Chem+2cappuccino muffinNo ratings yet
- Math Learning StationsDocument8 pagesMath Learning StationsShrey MahidaNo ratings yet
- Chapter 5 - Absorption (Part 1)Document41 pagesChapter 5 - Absorption (Part 1)La Casa Jordan100% (1)
- Waves A Level NotesDocument72 pagesWaves A Level Notesdamilolaamos296No ratings yet
- Gtu MCQ: Power Quality and Management (2180911)Document2 pagesGtu MCQ: Power Quality and Management (2180911)Yogesh YadavNo ratings yet
- SI Prefixes: Prefix Symbol Factor Prefix Symbol Factor Y Z E P T G M k h da d c m μ n p f a z yDocument2 pagesSI Prefixes: Prefix Symbol Factor Prefix Symbol Factor Y Z E P T G M k h da d c m μ n p f a z yDerick PeraltaNo ratings yet
- Geometry Formulas 2D 3D Perimeter Area VolumeDocument2 pagesGeometry Formulas 2D 3D Perimeter Area VolumesaidurgaNo ratings yet
- Experiment NodalDocument8 pagesExperiment NodalWyndellRioNo ratings yet
- Phys Int CC CH 19 - Electrical Circuits - Answers PDFDocument6 pagesPhys Int CC CH 19 - Electrical Circuits - Answers PDFmayaNo ratings yet
- LC200A EN ManualDocument10 pagesLC200A EN ManualGiovani DiasNo ratings yet
- 2 ND Pu PhysicsDocument3 pages2 ND Pu PhysicsNagalatha Sudharshan JainNo ratings yet
- Diffraction PPT 2021Document36 pagesDiffraction PPT 2021shreyas chawareNo ratings yet
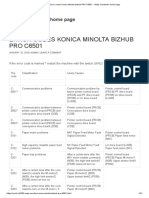
- Error Codes Konica Minolta Bizhub PRO C6501 - Vitaliy Yurchenko Home PageDocument31 pagesError Codes Konica Minolta Bizhub PRO C6501 - Vitaliy Yurchenko Home PageHmodi HasanNo ratings yet
- Ac Part 2Document10 pagesAc Part 2Lester James SaingNo ratings yet
- Nec TablesDocument21 pagesNec TablesDelmar FerrerNo ratings yet