You might also like
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document11 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Aslam MohammadNo ratings yet
- Electrical Drives (1) (1)Document194 pagesElectrical Drives (1) (1)KITSAO SAMUELNo ratings yet
- Project PDFDocument43 pagesProject PDFtaddese bekele100% (6)
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocument14 pagesBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteNo ratings yet
- Power Semi Conductor DrivesDocument38 pagesPower Semi Conductor Drivesdeepu4303No ratings yet
- Solid State Drives Digital NotesDocument195 pagesSolid State Drives Digital NotesShanmukh VegiNo ratings yet
- Guest Lecture: DC and AC Motor DrivesDocument38 pagesGuest Lecture: DC and AC Motor DrivesveenaNo ratings yet
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- Unit - 2 SSDDocument85 pagesUnit - 2 SSDAkshat SaxenaNo ratings yet
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 pagesDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariNo ratings yet
- Topic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyDocument13 pagesTopic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyMAr Lon Dela CruzNo ratings yet
- Industrial Drives and ControlDocument10 pagesIndustrial Drives and ControlMohit SanandiyaNo ratings yet
- IDS NewDocument128 pagesIDS NewShahbaz Ali100% (1)
- Chapter 1 - Electric DriveDocument76 pagesChapter 1 - Electric DriveNajihah YusofNo ratings yet
- Electric DrivesDocument5 pagesElectric DrivesSiddhant GaikwadNo ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- Modern Speed Control Technologies of AC MotorsDocument3 pagesModern Speed Control Technologies of AC MotorsmadhumithaaNo ratings yet
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document38 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1nightfurryify0% (1)
- Electrical DrivesDocument204 pagesElectrical DrivesRuchiNo ratings yet
- The Advantages and Hazards of DC MotorsDocument6 pagesThe Advantages and Hazards of DC MotorsGalco IndustrialNo ratings yet
- Assosa University: Collage of Engineering and Technology Department of Mechanical Mechatronics Assignment 1Document32 pagesAssosa University: Collage of Engineering and Technology Department of Mechanical Mechatronics Assignment 1Elijah T DhNo ratings yet
- DC Motor Speed Control Using PLCDocument9 pagesDC Motor Speed Control Using PLCT.JEMIMAPRICILLAHNo ratings yet
- PSD..UNIT 3..motor DrivesDocument38 pagesPSD..UNIT 3..motor Drivessatish reddyNo ratings yet
- W3 - Introduction To VFD AC DrivesDocument51 pagesW3 - Introduction To VFD AC DrivesBen RileyNo ratings yet
- Implementation of Boost Converter Applied For DC Motor DriveDocument51 pagesImplementation of Boost Converter Applied For DC Motor DriveLeri FirdianNo ratings yet
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- AC Versus DC in Crane Modernisation Projects: ORT Echnology NternationalDocument3 pagesAC Versus DC in Crane Modernisation Projects: ORT Echnology NternationalDedy AlfNo ratings yet
- Universal Motor - PPSXDocument29 pagesUniversal Motor - PPSXPerfil Web JdcortestwebNo ratings yet
- DC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document29 pagesDC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1JordiNo ratings yet
- LabVolt Industrial AC DrivesDocument121 pagesLabVolt Industrial AC Drivesumer farooqNo ratings yet
- DriveDocument7 pagesDrivenaveen jainNo ratings yet
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- Separately Excited DC Motor Speed Control Using Four Quadrant ChopperDocument3 pagesSeparately Excited DC Motor Speed Control Using Four Quadrant ChopperJay S PatelNo ratings yet
- Electrical Ac & DC Drives: S.Sumalatha G.Lakshmi PrasannaDocument20 pagesElectrical Ac & DC Drives: S.Sumalatha G.Lakshmi PrasannageniunetNo ratings yet
- Electrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Document83 pagesElectrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Thivya PrasadNo ratings yet
- DC DrivesDocument10 pagesDC DrivesEuoshy HussainNo ratings yet
- DC Motor Speed Control: Bayan University For Science & TechnologyDocument12 pagesDC Motor Speed Control: Bayan University For Science & TechnologyAltayeb AbdulhameedNo ratings yet
- Electrical Drives QuestionsDocument2 pagesElectrical Drives QuestionsUmang MewaraNo ratings yet
- Ac and DC MotorDocument6 pagesAc and DC MotorKhairunnisa ZakiriNo ratings yet
- Fundamentals of Electrical Drives SystemsDocument14 pagesFundamentals of Electrical Drives SystemsyaredNo ratings yet
- Three-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWDocument26 pagesThree-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWCarlos Roberto Amaya Rodriguez100% (1)
- DC Motor - Wikipedia, The Free EncyclopediaDocument2 pagesDC Motor - Wikipedia, The Free Encyclopediadonodoni0008No ratings yet
- Advantages and Disadvantages of DC MotorDocument6 pagesAdvantages and Disadvantages of DC MotorMuhd Izwan Ikhmal RosliNo ratings yet
- IJETR2166Document8 pagesIJETR2166anil kasotNo ratings yet
- Chapter - 1 DET5063 Combine pdf-1Document30 pagesChapter - 1 DET5063 Combine pdf-1Muhd FaizNo ratings yet
- Vignan's Lara Institute Power Semiconductor DrivesDocument2 pagesVignan's Lara Institute Power Semiconductor DrivesVenkat ManiNo ratings yet
- Energy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfDocument6 pagesEnergy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfkannanNo ratings yet
- DC Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document20 pagesDC Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Engr Umar AshrafNo ratings yet
- Electrical DrivesDocument191 pagesElectrical Drivesbangs34No ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor by Using Cascaded H-Bridge Multilevel InverterDocument52 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor by Using Cascaded H-Bridge Multilevel Inverterharish100% (1)
- DC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document21 pagesDC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Abir LovesickNo ratings yet
- Irjet V4i1140 PDFDocument5 pagesIrjet V4i1140 PDFMohamed AhmedNo ratings yet
- Speed Control of DC MotorDocument18 pagesSpeed Control of DC Motorkrishnareddy_chintalaNo ratings yet
- Electric MachinesDocument4 pagesElectric Machinesمحمد حسین فیض اللهیNo ratings yet
- Chapter 4Document37 pagesChapter 4Atul Jaysing PatilNo ratings yet
- File 014Document42 pagesFile 014Zulkernain Omer TariqNo ratings yet
- DCDrive CharacteristicsDocument3 pagesDCDrive CharacteristicsyondamineNo ratings yet
- List Components 50 DefinitionDocument2 pagesList Components 50 DefinitionaNo ratings yet
- Tool Operating Manual Tool Operating Manual: 271-8590 Analyzer Group (24 Volt)Document40 pagesTool Operating Manual Tool Operating Manual: 271-8590 Analyzer Group (24 Volt)hebert trujilloNo ratings yet
- B.E (E&TC Engineering) 2019 Course SyllabusDocument102 pagesB.E (E&TC Engineering) 2019 Course SyllabusNikita ChoudhariNo ratings yet
- BE ECE Scheme & Syllabus 2017Document152 pagesBE ECE Scheme & Syllabus 2017Kenny SNo ratings yet
- Smart Lowside Power Switch: Hitfet BTS 149Document11 pagesSmart Lowside Power Switch: Hitfet BTS 149Pablo AllosiaNo ratings yet
- Chapter - 14 Semiconductor Electronics Materials, Devices and Simple CircuitsDocument9 pagesChapter - 14 Semiconductor Electronics Materials, Devices and Simple CircuitsSachin PatilNo ratings yet
- PN-JunctionDocument42 pagesPN-JunctionSahil AhujaNo ratings yet
- Modeling and Simulation of Photovoltaic PDFDocument11 pagesModeling and Simulation of Photovoltaic PDFvo.idNo ratings yet
- Irkt250 12Document6 pagesIrkt250 12Noman RizwanNo ratings yet
- P50N06Document4 pagesP50N06Rui MoreiraNo ratings yet
- IGCSE - Physics - MCQ 8 - Electrical ResistanceDocument6 pagesIGCSE - Physics - MCQ 8 - Electrical ResistanceHAMAD Noor100% (2)
- Online - Bai 2 - Mach Ban DanDocument15 pagesOnline - Bai 2 - Mach Ban DanThất VọngNo ratings yet
- Unit-Ii Junction Diode Characteristics and Special Semi Conductor DiodesDocument118 pagesUnit-Ii Junction Diode Characteristics and Special Semi Conductor DiodesradsradNo ratings yet
- Anna University Trichy B.Tech Information Technology SyllabusDocument84 pagesAnna University Trichy B.Tech Information Technology SyllabusvelklncitNo ratings yet
- Microwave Semiconductor DevicesDocument14 pagesMicrowave Semiconductor DevicesNitin KumarNo ratings yet
- Ni-Usb 6525Document20 pagesNi-Usb 6525Nguyễn Văn ViệtNo ratings yet
- 03 Power SCD 1Document85 pages03 Power SCD 1riajulNo ratings yet
- Automotive Digital Multimeter Safety GuideDocument64 pagesAutomotive Digital Multimeter Safety Guidejorge_pinzon_70No ratings yet
- UIS Test Circuit Design and AnalysisDocument23 pagesUIS Test Circuit Design and AnalysisDavideNo ratings yet
- Build a Portable Arc Welding MachineDocument45 pagesBuild a Portable Arc Welding MachineDaniel100% (1)
- (13b) Diode Sambungan P-NDocument27 pages(13b) Diode Sambungan P-NUlfie Kusuma WardhaniNo ratings yet
- Service Manual SP-110Document37 pagesService Manual SP-110ricardo_MassisNo ratings yet
- Sensor 276Document8 pagesSensor 276Erik Matos CapchaNo ratings yet
- Radio PillDocument5 pagesRadio PillSalai Kishwar Jahan100% (1)
- JEE 2024 Best Time Table To Score 220+ %ile in First Attempt GueranteedDocument60 pagesJEE 2024 Best Time Table To Score 220+ %ile in First Attempt Gueranteedharsh.mahori09No ratings yet
- Simulation Tools For Photovoltaic System Grid Integration StudiesDocument5 pagesSimulation Tools For Photovoltaic System Grid Integration StudiesMalek KamelNo ratings yet
- AC-DC Switch Mode Power Supply Design GuideDocument36 pagesAC-DC Switch Mode Power Supply Design GuideAhmed Fotoh100% (1)
- Therm 23 Tca AnglDocument13 pagesTherm 23 Tca AnglLIVIUBRATUNo ratings yet
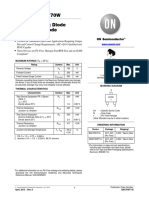
- BAV70W, SBAV70W Dual Switching Diode Common Cathode: FeaturesDocument5 pagesBAV70W, SBAV70W Dual Switching Diode Common Cathode: FeaturesHarish BNo ratings yet
- K241 AwebnotesDocument3 pagesK241 Awebnotespetre_blackNo ratings yet