You might also like
- Automatic Transmission - Transaxle U340e (Rm824e) PDFDocument106 pagesAutomatic Transmission - Transaxle U340e (Rm824e) PDFФедор Сумкин100% (6)
- Liebherr A309li - 307li - SERVICE MANUALDocument2,647 pagesLiebherr A309li - 307li - SERVICE MANUALSaulean Stefan100% (27)
- Power Semi Conductor DrivesDocument38 pagesPower Semi Conductor Drivesdeepu4303No ratings yet
- Guest Lecture: DC and AC Motor DrivesDocument38 pagesGuest Lecture: DC and AC Motor DrivesveenaNo ratings yet
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document38 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1nightfurryify0% (1)
- PSD..UNIT 3..motor DrivesDocument38 pagesPSD..UNIT 3..motor Drivessatish reddyNo ratings yet
- DC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document21 pagesDC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Abir LovesickNo ratings yet
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document11 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Aslam MohammadNo ratings yet
- Lecture 6 Speed Control of DC MotorDocument64 pagesLecture 6 Speed Control of DC MotorYulianto KentosNo ratings yet
- DC Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document20 pagesDC Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Engr Umar AshrafNo ratings yet
- XLecture 7 - DC DrivesDocument29 pagesXLecture 7 - DC DrivesমোঃওমরফারুকNo ratings yet
- Chapter 2Document46 pagesChapter 2Syazwan HafidziNo ratings yet
- Unit - 2 SSDDocument85 pagesUnit - 2 SSDAkshat SaxenaNo ratings yet
- IDS NewDocument128 pagesIDS NewShahbaz Ali100% (1)
- Ac DC DriveDocument92 pagesAc DC DriveUmang JainNo ratings yet
- Direct-Current Motor CharacteristicsDocument17 pagesDirect-Current Motor CharacteristicsMarque Adrian EncinaNo ratings yet
- DC Motor Speed Control: Bayan University For Science & TechnologyDocument12 pagesDC Motor Speed Control: Bayan University For Science & TechnologyAltayeb AbdulhameedNo ratings yet
- Unit 2 - EDDocument42 pagesUnit 2 - EDMohit L.E. 008No ratings yet
- DC Motors and Generators Chapter # 9Document13 pagesDC Motors and Generators Chapter # 9SamiNo ratings yet
- Karnataka Govt Evening Polytechnic MangaluruDocument9 pagesKarnataka Govt Evening Polytechnic MangaluruKishore KNo ratings yet
- Module IIIDocument32 pagesModule IIIsubhasish nayakNo ratings yet
- Chapter - 1 DET5063 Combine pdf-1Document30 pagesChapter - 1 DET5063 Combine pdf-1Muhd FaizNo ratings yet
- Separately Excited DC MotorDocument3 pagesSeparately Excited DC MotorMaitri ShahNo ratings yet
- Electric DrivesDocument5 pagesElectric DrivesSiddhant GaikwadNo ratings yet
- Resume B Ing Sistem Kendali Mesin Listrik 1Document7 pagesResume B Ing Sistem Kendali Mesin Listrik 1Vandy DpNo ratings yet
- Unit Ii Drive ChaacteristicsDocument26 pagesUnit Ii Drive Chaacteristicssaravanakmar vNo ratings yet
- Power ElectronicsDocument4 pagesPower Electronicsanwita.basakNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Modes of Operation of Stepper MotorDocument17 pagesModes of Operation of Stepper MotorSoumik GhoshNo ratings yet
- Stepper Motor Driving: Application NoteDocument17 pagesStepper Motor Driving: Application NoteGonzalo RiosNo ratings yet
- Unit 2 BedcDocument61 pagesUnit 2 BedcASHISHNo ratings yet
- Stepper Motor Driving: Application NoteDocument17 pagesStepper Motor Driving: Application NoteGonzalo RiosNo ratings yet
- 637 - 2024 Lab-4 Induction MachinesDocument12 pages637 - 2024 Lab-4 Induction Machineseren.alliNo ratings yet
- Energy Conversion One: Chapter NineDocument15 pagesEnergy Conversion One: Chapter NineSneh Deep SKNo ratings yet
- DC DrivesDocument10 pagesDC DrivesEuoshy HussainNo ratings yet
- Electric DrivesDocument32 pagesElectric DrivessangsangicnuNo ratings yet
- Types of Motor Used in Traction SystemDocument8 pagesTypes of Motor Used in Traction SystemShrestha Sanju100% (1)
- DC Motors Starting MethodsDocument6 pagesDC Motors Starting MethodsSai Teja KondraNo ratings yet
- Module 3 - Shunt DC MotorDocument12 pagesModule 3 - Shunt DC MotorMARY JOY MAGAWAYNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking MethodsRukkuArunNo ratings yet
- Chapter 2 Det50063 - Speed Control of DC MotorDocument53 pagesChapter 2 Det50063 - Speed Control of DC MotorKuhaanProNo ratings yet
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocument14 pagesBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteNo ratings yet
- EE-260 Lecture 36 Chapter 09Document17 pagesEE-260 Lecture 36 Chapter 09Hamza BashirNo ratings yet
- Speed Control of DC MotorDocument31 pagesSpeed Control of DC Motorabhinav. alpheus651997No ratings yet
- Class DutyDocument58 pagesClass DutyHarsha AnantwarNo ratings yet
- Chp5 DC Motor DrivesDocument38 pagesChp5 DC Motor Drivesblaze emberNo ratings yet
- 1.DC Motor Drives-Part1 Module 2 PDFDocument77 pages1.DC Motor Drives-Part1 Module 2 PDFsuvij ksNo ratings yet
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Document22 pagesGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraNo ratings yet
- Lecture 6Document31 pagesLecture 6amanuel abrehaNo ratings yet
- Chapter 2 Det50063 - Speed Control of DC MotorDocument54 pagesChapter 2 Det50063 - Speed Control of DC MotorFara Fara100% (1)
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking Methodskrishnareddy_chintalaNo ratings yet
- Modern VVVF DrivesDocument5 pagesModern VVVF DrivesJohn BackmanNo ratings yet
- Closed Loop Control of Separately Excited DC MotorDocument5 pagesClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINo ratings yet
- Unit 4 Electrical DrivesDocument16 pagesUnit 4 Electrical DrivesVaishnavi BharatiNo ratings yet
- 2.8 Classes - Speed - Control - and - Starting - of - DC - MotorsDocument5 pages2.8 Classes - Speed - Control - and - Starting - of - DC - MotorsEdison EstrellaNo ratings yet
- DC Motors BookDocument21 pagesDC Motors BookMeesixNo ratings yet
- DC Motor DrivesDocument50 pagesDC Motor DrivesHari PrasadNo ratings yet
- Pe 12Document31 pagesPe 12Santhosh Kumar JNo ratings yet
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- Electric MachinesDocument4 pagesElectric Machinesمحمد حسین فیض اللهیNo ratings yet
- Power Electronics: Lecture Notes of Power Electronics CourseFrom EverandPower Electronics: Lecture Notes of Power Electronics CourseNo ratings yet
- Model 75 Universal Power Feed: (Universal Unit Fits 100-200-300-1065 Machines)Document5 pagesModel 75 Universal Power Feed: (Universal Unit Fits 100-200-300-1065 Machines)Andres MNo ratings yet
- UP-IV Pocket CardDocument2 pagesUP-IV Pocket Cardfelix3189100% (1)
- All PumpDocument14 pagesAll PumpFrebu TrilanggaNo ratings yet
- Second Eng III 2 Engineering Knowledge Syllabus PDFDocument3 pagesSecond Eng III 2 Engineering Knowledge Syllabus PDFhome123No ratings yet
- 2G-Motor Technical Manual USADocument58 pages2G-Motor Technical Manual USADiego De La FuenteNo ratings yet
- Belt FrictionDocument5 pagesBelt FrictionShah NawazNo ratings yet
- Us 3123958 PDFDocument11 pagesUs 3123958 PDFLUIS ISAAC LEON PARONo ratings yet
- Renold PDFDocument27 pagesRenold PDFIrwing GonzálezNo ratings yet
- Water in Oil Monitoring SystemDocument13 pagesWater in Oil Monitoring Systempapaki2100% (1)
- Generator Manual-1Document11 pagesGenerator Manual-1Wilson PalacioNo ratings yet
- Manufacturing Process of 500MW Turbo GeneratorDocument45 pagesManufacturing Process of 500MW Turbo GeneratorRohit Uma TiwariNo ratings yet
- 036-21035-002-D-0602 YorkDocument32 pages036-21035-002-D-0602 YorkHolly KeptitrealNo ratings yet
- Delta Ia-Mds VFDB I TC 20070719Document2 pagesDelta Ia-Mds VFDB I TC 20070719homa54404No ratings yet
- Aice Question BankDocument3 pagesAice Question BankAnonymous bVWN51O90NNo ratings yet
- Machine Tools Lab Manual (13-14)Document39 pagesMachine Tools Lab Manual (13-14)Krishna Murthy100% (1)
- 54-24-3310 Milwaukee Service ManualDocument2 pages54-24-3310 Milwaukee Service ManualCarlos Salcedo100% (1)
- Blower Selection For PharmaDocument1 pageBlower Selection For PharmaKasturirangan NarayananNo ratings yet
- Column Drilling MachineDocument8 pagesColumn Drilling MachineShubhadeep MajumdarNo ratings yet
- Gula - 30012014163328Document20 pagesGula - 30012014163328Nirma Afrisanti KinasihNo ratings yet
- Refrigeration Cycle Presentation 1 JSarkarDocument11 pagesRefrigeration Cycle Presentation 1 JSarkarKusmakarNo ratings yet
- ServicesDocument17 pagesServicesAbhishek ChaudharyNo ratings yet
- Plumbing EstimateDocument3 pagesPlumbing Estimatepapa oforiNo ratings yet
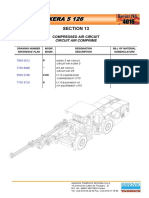
- S13 Compressed Air CircuitDocument48 pagesS13 Compressed Air CircuitHENRY HUAMANNo ratings yet
- Dynapac CP275 Dynapac CP275: Pneumatic Rollers Pneumatic RollersDocument2 pagesDynapac CP275 Dynapac CP275: Pneumatic Rollers Pneumatic RollersIrfan SaeedNo ratings yet
- Injector Specification: Nozzle Holder Assembly No. 34107Document2 pagesInjector Specification: Nozzle Holder Assembly No. 34107DIESEL MOTORSNo ratings yet
- Pedal Water PumpDocument51 pagesPedal Water PumpAlmubeenNo ratings yet
- 854 00-001 AVK015 Eng v1-0Document3 pages854 00-001 AVK015 Eng v1-0Jeff Tingin MarceloNo ratings yet
- Design of Wind RotorDocument23 pagesDesign of Wind Rotorayash mohantyNo ratings yet