You might also like
- Turning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.From EverandTurning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.No ratings yet
- Coiled Tubing Operations at a Glance: What Do You Know About Coiled Tubing Operations!From EverandCoiled Tubing Operations at a Glance: What Do You Know About Coiled Tubing Operations!Rating: 5 out of 5 stars5/5 (2)
- Defining Dir Drill - DesbloqueadoDocument2 pagesDefining Dir Drill - DesbloqueadoArturo OlivaNo ratings yet
- The Art of Controlling Wellbore Trajectory: Kate MantleDocument2 pagesThe Art of Controlling Wellbore Trajectory: Kate MantleMonica Tarqui ChuraNo ratings yet
- Prospects For The Use of Technology of Rotary Steerable Systems For The Directional DrillingDocument7 pagesProspects For The Use of Technology of Rotary Steerable Systems For The Directional DrillingAl-Shargabi MohaNo ratings yet
- Project Report 360 Degree Drilling MachineDocument11 pagesProject Report 360 Degree Drilling MachineSumit Bijwe80% (5)
- Lecture 5 Rotary Steeering MotorsDocument11 pagesLecture 5 Rotary Steeering MotorsAKSHAY SHEKHAWATNo ratings yet
- A Drill Is A Tool Fitted With A Cutting Tool Attachment or Driving Tool AttachmentDocument5 pagesA Drill Is A Tool Fitted With A Cutting Tool Attachment or Driving Tool Attachmentsujit_ranjanNo ratings yet
- Directional Drilling HistoryDocument7 pagesDirectional Drilling Historyhjdb2014100% (2)
- Mechanised Shaft SinkingDocument12 pagesMechanised Shaft Sinkingsauravsuman100% (2)
- Assignment-2 Topic: Rotary Steerable System (RSS) Name: Dhrumil Savalia Roll No: 17BPE025Document4 pagesAssignment-2 Topic: Rotary Steerable System (RSS) Name: Dhrumil Savalia Roll No: 17BPE025dhrumil savaliaNo ratings yet
- Machine Tools Lab ManualDocument32 pagesMachine Tools Lab ManualPhani Gurijala100% (2)
- Torque PDFDocument7 pagesTorque PDFSumanth Reddy100% (1)
- Introduction of Directional Drilling in Oil & Gas Indutry - WikipediaDocument5 pagesIntroduction of Directional Drilling in Oil & Gas Indutry - WikipediaFaiz AhmadNo ratings yet
- The Best of Both Worlds-A Hybrid Rotary Steerable System: Oklahoma City, Oklahoma, USADocument9 pagesThe Best of Both Worlds-A Hybrid Rotary Steerable System: Oklahoma City, Oklahoma, USAStefany Jimenez MendozaNo ratings yet
- Cbe-241rev Quad Processing MachineDocument12 pagesCbe-241rev Quad Processing MachineVigneshMurugesh ANo ratings yet
- Analysis of Distortion Mechanisms Used in Rotary Steerable SystemsDocument16 pagesAnalysis of Distortion Mechanisms Used in Rotary Steerable SystemsEclipse ShuNo ratings yet
- A Dissertation Report On "Hydraulic System"Document15 pagesA Dissertation Report On "Hydraulic System"hunny280889No ratings yet
- Drilling MachineDocument28 pagesDrilling Machineultimatestar1571No ratings yet
- 3 - Drilling EngineeringDocument118 pages3 - Drilling EngineeringNelson Frendika Yudha100% (4)
- 04 Hybrid RotaryDocument9 pages04 Hybrid RotaryElizabethMnsgNo ratings yet
- Ijeta V5i2p53 PDFDocument6 pagesIjeta V5i2p53 PDFRaj TysonNo ratings yet
- Dual Acting ShaperDocument30 pagesDual Acting ShaperAbhijeet NaikNo ratings yet
- Multi Spindle Drilling Machine Project File - CompressDocument28 pagesMulti Spindle Drilling Machine Project File - CompressSidhesh KalangutkarNo ratings yet
- General Purpose Machine Tools: Version 2 ME, IIT KharagpurDocument16 pagesGeneral Purpose Machine Tools: Version 2 ME, IIT KharagpurkdsahooNo ratings yet
- Bucket Wheel ExcavatorDocument2 pagesBucket Wheel ExcavatorRezaNo ratings yet
- Horizontal Directional Drilling New EraDocument8 pagesHorizontal Directional Drilling New EraMauricio CarestiaNo ratings yet
- Ijett V10P331 PDFDocument6 pagesIjett V10P331 PDFkalaiNo ratings yet
- Drilling Lectures BU 1Document32 pagesDrilling Lectures BU 1Talha Butt100% (1)
- Well InterventionDocument21 pagesWell InterventionCito Ali100% (1)
- Turning - Wikipedia, The Free EncyclopediaDocument6 pagesTurning - Wikipedia, The Free EncyclopediaKhateeb Ul Islam QadriNo ratings yet
- Semana 3 Ingeniería de PozosDocument40 pagesSemana 3 Ingeniería de PozospepeNo ratings yet
- Construction: Lathes Machining Metals Plastics Jargon Machine Tools Rotating Linear Tool Bits Drill BitsDocument8 pagesConstruction: Lathes Machining Metals Plastics Jargon Machine Tools Rotating Linear Tool Bits Drill Bitsviruz2_09No ratings yet
- I Sem Time TableDocument12 pagesI Sem Time TablepriyankarNo ratings yet
- MSJF Mod-1Document20 pagesMSJF Mod-1abithek03No ratings yet
- Drilling RigsDocument18 pagesDrilling RigsegyinspectoryahooNo ratings yet
- TurningDocument6 pagesTurningShivshankar Singh0% (1)
- 360 Degree Flexible Drilling Machine Ed Project ReviewDocument15 pages360 Degree Flexible Drilling Machine Ed Project ReviewAbdul mujeeb25% (4)
- Power Point PersentationDocument16 pagesPower Point PersentationMD AFSHANNo ratings yet
- Double Acting Shapper Too LDocument22 pagesDouble Acting Shapper Too LGopuNo ratings yet
- DV09PUB1 Study GuideDocument5 pagesDV09PUB1 Study Guidesbbu agraNo ratings yet
- An Operational Comparison of Push-The-Bit Rotary Steerable ToolsDocument12 pagesAn Operational Comparison of Push-The-Bit Rotary Steerable ToolsJosh SabimanNo ratings yet
- ALL Experiments MT-2Document16 pagesALL Experiments MT-2rahulyadav9944No ratings yet
- LatheDocument76 pagesLathebmm16957No ratings yet
- Design and Fabrication Mini Lathe MachineDocument17 pagesDesign and Fabrication Mini Lathe MachineBrij Bhushan Monu86% (7)
- Basic Drilling EngineeringDocument26 pagesBasic Drilling EngineeringBinh ChuNo ratings yet
- Cte Unit-5 NotesDocument34 pagesCte Unit-5 NotesLokesh MeenaNo ratings yet
- Basic Drilling EngineeringDocument26 pagesBasic Drilling EngineeringbhuvanchaudhariNo ratings yet
- Basics of Milling Machine and Its RigidityDocument9 pagesBasics of Milling Machine and Its RigidityshubhamNo ratings yet
- Design and Fabrication of 360 Degree Flexible Drilling MachineDocument6 pagesDesign and Fabrication of 360 Degree Flexible Drilling MachineMark RoyNo ratings yet
- Lathe, Drilling MachineDocument42 pagesLathe, Drilling MachineSaroj100% (1)
- Performance Comparison Analysis Between RSS and Conventional Mud Motor in Mavvar FieldDocument5 pagesPerformance Comparison Analysis Between RSS and Conventional Mud Motor in Mavvar FieldM. Fadhli Cesar KNo ratings yet
- Heavy Earth Moving MachinaryDocument34 pagesHeavy Earth Moving MachinaryMAZHAR ALAMNo ratings yet
- 18 Kinematic System and Operations of Drilling MachinesDocument16 pages18 Kinematic System and Operations of Drilling MachinesPRASAD326100% (4)
- Milling (Machining) - WikipediaDocument102 pagesMilling (Machining) - WikipediaQuelton NgulubeNo ratings yet
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- Steam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversFrom EverandSteam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversRating: 5 out of 5 stars5/5 (2)
- Fundamentals of Horizontal Wellbore Cleanout: Theory and Applications of Rotary Jetting TechnologyFrom EverandFundamentals of Horizontal Wellbore Cleanout: Theory and Applications of Rotary Jetting TechnologyNo ratings yet
- Wood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingFrom EverandWood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingNo ratings yet
- Traditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingFrom EverandTraditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingRating: 5 out of 5 stars5/5 (2)
- Multi Technical Features DrawingsDocument2 pagesMulti Technical Features DrawingsPatou PatriceNo ratings yet
- Slim Technical Features DrawingsDocument2 pagesSlim Technical Features DrawingsPatou PatriceNo ratings yet
- Cc15-24Xxsxx-E, Cc30-24Xxsxx-E Series Instruction Manual: Tdk-LambdaDocument11 pagesCc15-24Xxsxx-E, Cc30-24Xxsxx-E Series Instruction Manual: Tdk-LambdaPatou PatriceNo ratings yet
- Enclosure - CR 30-X - Drawer UnitDocument11 pagesEnclosure - CR 30-X - Drawer UnitPatou PatriceNo ratings yet
- Reference and Diagrams - All MotorsDocument1 pageReference and Diagrams - All MotorsPatou PatriceNo ratings yet
- General Schematic - CR30-XDocument9 pagesGeneral Schematic - CR30-XPatou PatriceNo ratings yet
- Enclosure - CR 30-X - Drawer Adjustment ToolDocument11 pagesEnclosure - CR 30-X - Drawer Adjustment ToolPatou PatriceNo ratings yet
- Digital X-Ray Imaging System User Manual - V4.1Document35 pagesDigital X-Ray Imaging System User Manual - V4.1Patou PatriceNo ratings yet
- X-Ray Tube Assembly Installation Manual 133228-000Document64 pagesX-Ray Tube Assembly Installation Manual 133228-000Patou PatriceNo ratings yet
- E-Com Droc User ManualDocument91 pagesE-Com Droc User ManualPatou PatriceNo ratings yet
- Drillstring & BHA Design: Habiburrohman AbdullahDocument36 pagesDrillstring & BHA Design: Habiburrohman AbdullahPatou PatriceNo ratings yet
- Telescope: More Data, Delivered FasterDocument3 pagesTelescope: More Data, Delivered FasterPatou PatriceNo ratings yet
- Drilling Jar: General FeaturesDocument2 pagesDrilling Jar: General FeaturesPatou PatriceNo ratings yet
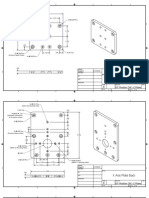
- X Axis Plate Front: DIY Modular CNC v2 Plates BDocument5 pagesX Axis Plate Front: DIY Modular CNC v2 Plates BDani Hp100% (1)
- The Complete Guide To Polyurethane PUR Hot Melt AdhesivesDocument3 pagesThe Complete Guide To Polyurethane PUR Hot Melt AdhesivesCarlotaNo ratings yet
- Johnnie Coats USADocument2 pagesJohnnie Coats USAPhong AnhNo ratings yet
- Tube Hone Tooling and Accessories Selection Guide: Heavy-Duty Push-Tools CatalogDocument50 pagesTube Hone Tooling and Accessories Selection Guide: Heavy-Duty Push-Tools CatalogEduardoCastilloNo ratings yet
- Total Tools and EquipmentDocument5 pagesTotal Tools and EquipmentFaisalNo ratings yet
- Quantity Survey Methods in Buildings: by V.R.K.MurtyDocument101 pagesQuantity Survey Methods in Buildings: by V.R.K.MurtyRatnesh PatelNo ratings yet
- By Guido Henn: (Translation by Brian Anderson)Document102 pagesBy Guido Henn: (Translation by Brian Anderson)jose cuauhtemoc mendoza torresNo ratings yet
- Daftar PustakaDocument3 pagesDaftar PustakaAnonymous UXu3EGRNo ratings yet
- BLADERev.0-2020!09!14 - KOR Orthopaedic Saw BladesDocument20 pagesBLADERev.0-2020!09!14 - KOR Orthopaedic Saw Blades오세운No ratings yet
- CNC Bits Buying Guide: C08 C15 SS17 SF17 SB17Document9 pagesCNC Bits Buying Guide: C08 C15 SS17 SF17 SB17Sandro AlcantaraNo ratings yet
- Ecpn 3 111Document135 pagesEcpn 3 111Sitotaw Alemu100% (2)
- Module 3Document22 pagesModule 3Krizel WardeNo ratings yet
- Un Shaft Drawing - Final PDFDocument1 pageUn Shaft Drawing - Final PDFMark Paul EsguerraNo ratings yet
- Catalogue Polishing AbrasivesDocument12 pagesCatalogue Polishing AbrasivesMuhammad ShafiqueNo ratings yet
- Ghorahi Material Purchase DetailsDocument9 pagesGhorahi Material Purchase Detailsbooks2horizonNo ratings yet
- Itemstockcost ItemstockcostDocument12 pagesItemstockcost ItemstockcostVignesh SNo ratings yet
- Machine Tools WorkshopDocument4 pagesMachine Tools WorkshopJuan RuizNo ratings yet
- Coconut Husk Particle BoardDocument1 pageCoconut Husk Particle BoardKiran KumarNo ratings yet
- Milling Machine Definition Parts Types Operations With PDFDocument11 pagesMilling Machine Definition Parts Types Operations With PDFDark AceNo ratings yet
- MP Tools Professional Bench GrinderDocument2 pagesMP Tools Professional Bench GrinderJulian CadenaNo ratings yet
- Call/Wa 0811-30-8797 Harga Mesin CNC Router Mini YogyakartaDocument9 pagesCall/Wa 0811-30-8797 Harga Mesin CNC Router Mini Yogyakartaharga mesin cnc terbaru malangNo ratings yet
- DJJ40142. Grinding ReportDocument14 pagesDJJ40142. Grinding ReportMira Amira100% (1)
- Brother BAS-311F-0, - 311F-L, - 326F-0Document148 pagesBrother BAS-311F-0, - 311F-L, - 326F-0Nabil ElrhalmiNo ratings yet
- CAPO & CAPO Lite TDS-01Document6 pagesCAPO & CAPO Lite TDS-01HAMZA RASHEEDNo ratings yet
- UOW - Lecture 1-Safety in WorkshopDocument5 pagesUOW - Lecture 1-Safety in WorkshopVinnoth SrikumarNo ratings yet
- SSC SA-7374 Idle Gear B Engine WARRANTYDocument1 pageSSC SA-7374 Idle Gear B Engine WARRANTYEngineering ProductionNo ratings yet
- LAB REPORT of Filling OperationDocument4 pagesLAB REPORT of Filling OperationAhtisham AmjadNo ratings yet
- Tic Tac Toe: Step 1: Skill 1 - Mark The Lines Using A Ruler and PencilDocument4 pagesTic Tac Toe: Step 1: Skill 1 - Mark The Lines Using A Ruler and PencilRod HyattNo ratings yet
- Beam Engine Mechanism Powered Circular Sawing Machine ReportDocument34 pagesBeam Engine Mechanism Powered Circular Sawing Machine ReportSanjay CrNo ratings yet
- Esr 1040 Boise CascadeDocument8 pagesEsr 1040 Boise CascademurdicksNo ratings yet