You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Leaving The Matrix - EbookDocument214 pagesLeaving The Matrix - EbookNina100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Wind Load (On Roof)Document11 pagesWind Load (On Roof)vinayNo ratings yet
- Inplace Analysis - Case StudyDocument5 pagesInplace Analysis - Case StudyraaaaajjjjjNo ratings yet
- Buckling Behavior of Split MullionDocument41 pagesBuckling Behavior of Split MullionNguyễn SơnNo ratings yet
- Iso 21940 11 2016 en PDFDocument11 pagesIso 21940 11 2016 en PDFThiago Daumas0% (5)
- A Modeling and Simulation Based On The Multibody Dynamics For An Autonomous Agricultural RobotDocument7 pagesA Modeling and Simulation Based On The Multibody Dynamics For An Autonomous Agricultural RobotmohamedNo ratings yet
- Course1 PMSM DetailsDocument4 pagesCourse1 PMSM DetailsmohamedNo ratings yet
- AC Magnetic 2D Passive ConductorsDocument9 pagesAC Magnetic 2D Passive ConductorsmohamedNo ratings yet
- Modelling of Magnetostriction of Transformer Magnetic Core For Vibration AnalysisDocument6 pagesModelling of Magnetostriction of Transformer Magnetic Core For Vibration AnalysismohamedNo ratings yet
- Analytical Calculation of Magnetic Field Created by A Ring Magnet Used in Magnetron RF ReactorDocument5 pagesAnalytical Calculation of Magnetic Field Created by A Ring Magnet Used in Magnetron RF ReactormohamedNo ratings yet
- Design Experiments and Multidisciplinary OptimizatDocument15 pagesDesign Experiments and Multidisciplinary OptimizatmohamedNo ratings yet
- BH CurveDocument12 pagesBH CurvemohamedNo ratings yet
- Design Improvement of A Linear Control Solenoid Valve Using Multiphysics SimulationDocument8 pagesDesign Improvement of A Linear Control Solenoid Valve Using Multiphysics SimulationmohamedNo ratings yet
- Finite Element Analysis and Design Optimization of A Pneumatically Actuating Silicone Module For Robotic Surgery ApplicationsDocument9 pagesFinite Element Analysis and Design Optimization of A Pneumatically Actuating Silicone Module For Robotic Surgery ApplicationsmohamedNo ratings yet
- ACI Concrete Beam DetailingDocument12 pagesACI Concrete Beam DetailingShaik Eliyas BashaNo ratings yet
- Some Tips For The Revised CSIR UGC NET For Physical SciencesDocument15 pagesSome Tips For The Revised CSIR UGC NET For Physical SciencesJijo P. Ulahannan100% (12)
- Multi - Strand - Stay - Cablems - Revised - 20220530 - TM - DIGITAL 6Document1 pageMulti - Strand - Stay - Cablems - Revised - 20220530 - TM - DIGITAL 6PrateekNo ratings yet
- Magnet Quiz 3Document2 pagesMagnet Quiz 3AYLEEN HAIDERNo ratings yet
- CHE 101 - Mock Questions and AnswersDocument5 pagesCHE 101 - Mock Questions and Answersbeulahhub0No ratings yet
- NEW Atlanta Permaline 2019Document2 pagesNEW Atlanta Permaline 2019gregNo ratings yet
- Calculation Improvement of The Clay Content in The Hydrocarbon Formation RocksDocument3 pagesCalculation Improvement of The Clay Content in The Hydrocarbon Formation RocksMujtabaNo ratings yet
- Q2 Ion: Innovation With IntegrityDocument2 pagesQ2 Ion: Innovation With IntegrityWoodrow FoxNo ratings yet
- Dynamic Force Analysis ProblemsDocument8 pagesDynamic Force Analysis Problemsa c s KumarNo ratings yet
- Unroofing History of The Northwestern Ethiopian Plateau - InsightsDocument51 pagesUnroofing History of The Northwestern Ethiopian Plateau - InsightsSiraj BeyanNo ratings yet
- MATCON - Experiment 5 Group 1Document7 pagesMATCON - Experiment 5 Group 1Yolanda SelgaNo ratings yet
- Zone 1 1 DaysDocument29 pagesZone 1 1 Daysa.aaqib0704No ratings yet
- Module 1 Types of Fluid and Its PropertiesDocument11 pagesModule 1 Types of Fluid and Its PropertiesAragones, Trisha Marie CNo ratings yet
- Lectura de Condensador MLCDocument84 pagesLectura de Condensador MLCjhon jairo gomez solanoNo ratings yet
- Pastor M Tamagnini C Numerical Modelling in GeomechanicsDocument351 pagesPastor M Tamagnini C Numerical Modelling in GeomechanicsBrysnerNo ratings yet
- Manufacture of GranulesDocument11 pagesManufacture of GranulesbalamuruganNo ratings yet
- Design and Motion Control of Autonomous Underwater Vehicle AmoghDocument9 pagesDesign and Motion Control of Autonomous Underwater Vehicle AmoghSuman SahaNo ratings yet
- Discrete Math - 3.5 Floor and Ceiling P. DanzigerDocument1 pageDiscrete Math - 3.5 Floor and Ceiling P. DanzigerRisad ShahriarNo ratings yet
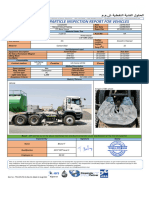
- Magnetic Particle Inspection Report For Vehicles: Particles CleanerDocument1 pageMagnetic Particle Inspection Report For Vehicles: Particles Cleanerbalaji baluNo ratings yet
- Swami Ramanand Teerth Marathwada University, NandedDocument19 pagesSwami Ramanand Teerth Marathwada University, NandedsmpopadeNo ratings yet
- Density ExercisesDocument2 pagesDensity ExercisesProf. David G.No ratings yet
- Sample Paper 1Document8 pagesSample Paper 1Kanha BSNo ratings yet
- Th04 140Document4 pagesTh04 140paramarthasom1974No ratings yet
- General Physics LaboratoryDocument3 pagesGeneral Physics Laboratorynameb22362No ratings yet
- Using Seismic Records To Determine The Predominant Vibration Frequency of A Tailings Dam EmbankmentDocument8 pagesUsing Seismic Records To Determine The Predominant Vibration Frequency of A Tailings Dam EmbankmentSebastian PalaciosNo ratings yet