You might also like
- Francis TurbineDocument9 pagesFrancis TurbineKlinsmannJanujajJurgenNo ratings yet
- Mystmt - 2022 11 09Document5 pagesMystmt - 2022 11 09sylvia100% (2)
- Forming Nouns and AdjectivesDocument10 pagesForming Nouns and AdjectivesGlenpptNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Ratio DecidendiDocument12 pagesRatio DecidendiAbhidhaNo ratings yet
- Loving U FormatDocument5 pagesLoving U FormatMitch Okboy100% (6)
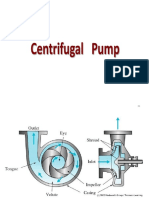
- Centrifugal PumpsDocument105 pagesCentrifugal PumpsMohamed Moataz100% (1)
- Labour Economics Notes HRM 201Document23 pagesLabour Economics Notes HRM 201Losh Min Ryan64% (11)
- NASA-TM-2017-219475 Installation Torque Tables For Noncritical ApplicationsDocument332 pagesNASA-TM-2017-219475 Installation Torque Tables For Noncritical ApplicationsRobert LauNo ratings yet
- Thesis Manuscript - JBLabita PDFDocument124 pagesThesis Manuscript - JBLabita PDFJacob LabitaNo ratings yet
- Qualitative Research BRMDocument28 pagesQualitative Research BRMSrinivas AmaraNo ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Internal Combustion Engines Gas Turbine Engines Chemical Rockets Non-Chemical Space Propulsion SystemsDocument49 pagesInternal Combustion Engines Gas Turbine Engines Chemical Rockets Non-Chemical Space Propulsion SystemsRoni Al HabsyNo ratings yet
- GR 169143Document1 pageGR 169143Leomar Despi LadongaNo ratings yet
- Governor PDFDocument94 pagesGovernor PDFmudit verma0% (1)
- Universal Governor AppartusDocument21 pagesUniversal Governor Appartusramniwas123No ratings yet
- Energy Transfer in TurbomachinesDocument60 pagesEnergy Transfer in TurbomachinesKaren NelsonNo ratings yet
- Study of Flywheel: Visit For More Learning ResourcesDocument50 pagesStudy of Flywheel: Visit For More Learning ResourcesAditi RayNo ratings yet
- Mechanical GovernorsDocument23 pagesMechanical Governorsahmadhamada0511No ratings yet
- DOM - Governor NotesDocument17 pagesDOM - Governor NotesEssKay0% (1)
- Unit 2 Reaction Turbine: G F G FDocument16 pagesUnit 2 Reaction Turbine: G F G FPnpnNo ratings yet
- Governors: Roll No:17700716023Document42 pagesGovernors: Roll No:17700716023Biswanath samantaNo ratings yet
- 4 DynamometerDocument8 pages4 DynamometerParesh PatilNo ratings yet
- Energy Transfer in Turbomachines PDFDocument60 pagesEnergy Transfer in Turbomachines PDFAtheer Sat0% (1)
- Sci8 - Circular MotionDocument47 pagesSci8 - Circular Motiontchr keiNo ratings yet
- Fluid Machinery: Hydraulic TurbinesDocument19 pagesFluid Machinery: Hydraulic Turbinesmathews munyumbeNo ratings yet
- Fluid Machinery: Hydraulic TurbinesDocument19 pagesFluid Machinery: Hydraulic Turbinesmathews munyumbeNo ratings yet
- المحاضرة 5Document15 pagesالمحاضرة 5عبدالله باسم خلاوي مانعNo ratings yet
- Rotatory MotionDocument55 pagesRotatory MotionstudyingwithjuhiNo ratings yet
- Dynamometers 161011144109Document28 pagesDynamometers 161011144109Mr.S UpenderNo ratings yet
- Hydraulic Turbine 2Document10 pagesHydraulic Turbine 2Suman Kumar DashNo ratings yet
- DYNAMOMETERDocument14 pagesDYNAMOMETERpradip payghanNo ratings yet
- Torque Measurement... : Mechanical Dynamometers.. S.SANJAY (18P221)Document52 pagesTorque Measurement... : Mechanical Dynamometers.. S.SANJAY (18P221)vijay AmirtharajNo ratings yet
- Introduction To Fluid Machines (Lectures 49 To 53) : NQ GH NP GH NP GH NQ GHDocument8 pagesIntroduction To Fluid Machines (Lectures 49 To 53) : NQ GH NP GH NP GH NQ GHAtheer SatNo ratings yet
- Unit # 8 Governor: Mechanis of Material & Machines 1Document27 pagesUnit # 8 Governor: Mechanis of Material & Machines 1api-19790673100% (2)
- Lecture 5 Momentum and Energy BalanceDocument17 pagesLecture 5 Momentum and Energy BalanceFlorenceNo ratings yet
- 03 Circular Motion Formula Sheets QuizrrDocument4 pages03 Circular Motion Formula Sheets QuizrrAryan DeNo ratings yet
- MD 2 Page (29-33) Flywheels (Revised Equations)Document17 pagesMD 2 Page (29-33) Flywheels (Revised Equations)Jerome Russel PublìcòNo ratings yet
- PE Lecture - 8 - NDocument26 pagesPE Lecture - 8 - Nahmed el-sayedNo ratings yet
- Power Screws: ME 147P Machine Design IDocument23 pagesPower Screws: ME 147P Machine Design IJohn Karl De BelenNo ratings yet
- Basic Calculation - PhysicDocument46 pagesBasic Calculation - PhysicjalbartcNo ratings yet
- 03 Circular Motion Formula Sheets QuizrrDocument2 pages03 Circular Motion Formula Sheets Quizrrhp laptopNo ratings yet
- HHM - Unit V TurbinesDocument30 pagesHHM - Unit V Turbines032 HarshithNo ratings yet
- Horizontal Curve Setting: MD Aftabuzzaman, PHDDocument39 pagesHorizontal Curve Setting: MD Aftabuzzaman, PHDJoe NjoreNo ratings yet
- CE202 2020 HM Part IIDocument26 pagesCE202 2020 HM Part IIVisal PiscelNo ratings yet
- Propeller TheoriesDocument25 pagesPropeller TheoriessomuNo ratings yet
- Presentation On Hydraulic TurbineDocument32 pagesPresentation On Hydraulic TurbineMudrika PatelNo ratings yet
- ME5521 Chapter4 2 2012Document51 pagesME5521 Chapter4 2 2012Sebastián EspinozaNo ratings yet
- Kinetics of Curvilinear Translation. Dynamic EquilibriumDocument3 pagesKinetics of Curvilinear Translation. Dynamic EquilibriumCONFI DENTIALNo ratings yet
- EXPERIMENT # 5 Pelton Turbine Test: Izmir Katip Celebi University Department of Civil Engineering Ce 351 HydraulicsDocument11 pagesEXPERIMENT # 5 Pelton Turbine Test: Izmir Katip Celebi University Department of Civil Engineering Ce 351 HydraulicsMazlum UçarNo ratings yet
- Lecture Title 13Document77 pagesLecture Title 13Adel AshrafNo ratings yet
- Lecture 5 - GovernorsDocument53 pagesLecture 5 - GovernorsJamiza shenningNo ratings yet
- 06-DC ChopperDocument26 pages06-DC ChopperTuhin ShahNo ratings yet
- CIVE 140001 3. The Discharge of Water Through A 140º Bend, Shown in Figure 1, Is 30 Litres/s. The Bend IsDocument2 pagesCIVE 140001 3. The Discharge of Water Through A 140º Bend, Shown in Figure 1, Is 30 Litres/s. The Bend Ispirata fbzNo ratings yet
- PE Lecture 6Document25 pagesPE Lecture 6ahmed el-sayedNo ratings yet
- MomentsDocument2 pagesMomentsAlexander BrooksNo ratings yet
- Reaction Turbines: 1. Radially Outward Flow Reaction Turbine: This Reaction TurbineDocument16 pagesReaction Turbines: 1. Radially Outward Flow Reaction Turbine: This Reaction TurbinesaitejaNo ratings yet
- 4.forced VibrationsDocument62 pages4.forced Vibrationspiravi66No ratings yet
- Fluid Machines: Chapter 1: Introduction of Turbo Machine and Dynamic Action of FluidDocument49 pagesFluid Machines: Chapter 1: Introduction of Turbo Machine and Dynamic Action of FluidSneha SahNo ratings yet
- Recap: Lecture 5: - Velocity Components and Nomenclature - Velocity TrianglesDocument16 pagesRecap: Lecture 5: - Velocity Components and Nomenclature - Velocity TriangleslavaNo ratings yet
- Kinetics of A Particle: Work and Energy (IV) : by Dr. Toh Hoong ThiamDocument26 pagesKinetics of A Particle: Work and Energy (IV) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Axial Flow TurbinesDocument23 pagesAxial Flow TurbinesSurekha GurijalaNo ratings yet
- Flywheels 2020Document24 pagesFlywheels 2020Visal PiscelNo ratings yet
- Review of Basic Power System Principle and Calculation (Single Phase Ac Circuit)Document34 pagesReview of Basic Power System Principle and Calculation (Single Phase Ac Circuit)hikmet darıcıNo ratings yet
- LEC-7 FLUID DYNAMICS Part-A & B With NumericalsDocument57 pagesLEC-7 FLUID DYNAMICS Part-A & B With NumericalsTAYMOOR IMRANNo ratings yet
- Ec 310: Hydraulics Lecture NotesDocument14 pagesEc 310: Hydraulics Lecture NotesChileshe Mulenga PhiriNo ratings yet
- The Ability of A Force To Rotate A Body About Some Axis.: TorqueDocument37 pagesThe Ability of A Force To Rotate A Body About Some Axis.: TorqueWendy RissmeyerNo ratings yet
- A Device To Generate Plentiful, Cheap An Multi-Purpose Source To Satisfy Extra-Somatic NeedsDocument60 pagesA Device To Generate Plentiful, Cheap An Multi-Purpose Source To Satisfy Extra-Somatic NeedsSrotriya TripathiNo ratings yet
- Steam TurbineDocument46 pagesSteam TurbineIbrahim Mostafa67% (3)
- Tips On How To Write A Better Narrative EssayDocument6 pagesTips On How To Write A Better Narrative EssayAjlia AzamNo ratings yet
- Chapter 1 PhoneticsDocument9 pagesChapter 1 PhoneticsAthaya FirdaNo ratings yet
- Joshua 1 2ndDocument5 pagesJoshua 1 2ndPatrick EdrosoloNo ratings yet
- Mtravers Resume 201820181104-1-1qhyuhjDocument1 pageMtravers Resume 201820181104-1-1qhyuhjapi-445643461No ratings yet
- Innovation, Co-Creation, and Design Thinking How Salesforce's Ignite Team Accelerates Enterprise Digital Transformation B5928-PDF-EnGDocument20 pagesInnovation, Co-Creation, and Design Thinking How Salesforce's Ignite Team Accelerates Enterprise Digital Transformation B5928-PDF-EnGAnkit JhaNo ratings yet
- CGI 2024 Version AnglaiseDocument550 pagesCGI 2024 Version AnglaiseKendra LeslyNo ratings yet
- SÓP On SOPDocument3 pagesSÓP On SOPThien Doan ChiNo ratings yet
- Santo G Profile 260623Z5Document64 pagesSanto G Profile 260623Z5Ali DesnaviNo ratings yet
- Consonant SoundsDocument20 pagesConsonant SoundsRoselyn Lictawa Dela CruzNo ratings yet
- Ecological InventoryDocument3 pagesEcological InventoryStephanie Hanson100% (1)
- Loneliness ScaleDocument9 pagesLoneliness ScaleEliza DNNo ratings yet
- Megatech, Inc. Case Study 1: John Locke - SM 300 - Chapter 1 ActivityDocument2 pagesMegatech, Inc. Case Study 1: John Locke - SM 300 - Chapter 1 ActivityRené Ríos100% (1)
- Y%S, XLD M Dka %SL Iudcjd Ckrcfha .Eiü M %H: The Gazette of The Democratic Socialist Republic of Sri LankaDocument13 pagesY%S, XLD M Dka %SL Iudcjd Ckrcfha .Eiü M %H: The Gazette of The Democratic Socialist Republic of Sri LankaYoonus MaheesNo ratings yet
- Improvisation RubricDocument9 pagesImprovisation RubricjoshNo ratings yet
- Godfrey Gao - Google Search PDFDocument1 pageGodfrey Gao - Google Search PDFhahaNo ratings yet
- A History of Islamic Societies PDFDocument47 pagesA History of Islamic Societies PDFSimone SidasowNo ratings yet
- Inggris Waib Explanation TextDocument5 pagesInggris Waib Explanation TextWidya BaitanuNo ratings yet
- Students' Errors in Using Inflectional MorphemesDocument28 pagesStudents' Errors in Using Inflectional MorphemesMayangsari DzulkifliNo ratings yet
- Sajonas V CADocument15 pagesSajonas V CAMary LeandaNo ratings yet
- Ideology: Teun A. Van DijkDocument11 pagesIdeology: Teun A. Van Dijkkim whiteNo ratings yet
- Language: We Are What We SpeakDocument25 pagesLanguage: We Are What We SpeakSNo ratings yet