You might also like
- 73 220 Lecture10Document24 pages73 220 Lecture10api-26315128No ratings yet
- Forward KinematicsDocument4 pagesForward KinematicsZafer Gök100% (1)
- MIT15 053S13 Lec14 PDFDocument36 pagesMIT15 053S13 Lec14 PDFShashank SinglaNo ratings yet
- AI SearchDocument47 pagesAI SearchVivek GargNo ratings yet
- Binary IntegerDocument23 pagesBinary IntegerAung Zaw MoeNo ratings yet
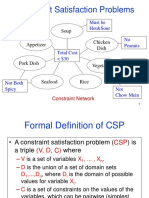
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDocument45 pagesConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNo ratings yet
- ExampleDocument7 pagesExampleKaliedNo ratings yet
- Tutorial Chapter 1 & 2: Prepared by Mohd Saifizi Bin SaidonDocument16 pagesTutorial Chapter 1 & 2: Prepared by Mohd Saifizi Bin SaidonThông NguyễnNo ratings yet
- Point-to-Point Shortest Path Algorithms With Preprocessing: Microsoft Research - Silicon ValleyDocument44 pagesPoint-to-Point Shortest Path Algorithms With Preprocessing: Microsoft Research - Silicon ValleyRátkai ZoltánNo ratings yet
- Chapter-5 Z-TransformDocument19 pagesChapter-5 Z-TransformEndale GezahgnNo ratings yet
- 10 Shortest Paths in Graphs 3 Bellman FordDocument100 pages10 Shortest Paths in Graphs 3 Bellman FordRanveer SinghaniyaNo ratings yet
- Loops and Conditionals: HORT 59000 Instructor: Kranthi VaralaDocument27 pagesLoops and Conditionals: HORT 59000 Instructor: Kranthi VaralaJashwanth SanguNo ratings yet
- Small Signal Equations of The Induction Machine: Chapter - 5Document18 pagesSmall Signal Equations of The Induction Machine: Chapter - 5Darshan RaghuNo ratings yet
- Local Search (Littman Fall)Document38 pagesLocal Search (Littman Fall)Pragyanand TiwariNo ratings yet
- Analysis of AlgorithmsDocument13 pagesAnalysis of AlgorithmsShayan AhmedNo ratings yet
- LeastsqDocument54 pagesLeastsqAjeet KumarNo ratings yet
- CSC 550: Introduction To Artificial Intelligence Fall 2004: AI As SearchDocument25 pagesCSC 550: Introduction To Artificial Intelligence Fall 2004: AI As SearchDamanjeet SinghNo ratings yet
- CME 4425 Introduction To Bioinformatics Algorithms: Zerrin Işık Zerrin@cs - Deu.edu - TRDocument43 pagesCME 4425 Introduction To Bioinformatics Algorithms: Zerrin Işık Zerrin@cs - Deu.edu - TRMahmud KorkmazNo ratings yet
- ZRLocus For AnalysisDocument44 pagesZRLocus For AnalysisYusufANo ratings yet
- Modular Arithmetic and The RSA CryptosystemDocument92 pagesModular Arithmetic and The RSA CryptosystemWa Ode MuslimahNo ratings yet
- Ma1102R Calculus Lesson 8: Wang FeiDocument13 pagesMa1102R Calculus Lesson 8: Wang FeidelsonwiestNo ratings yet
- Greedyalgorithm Makingchange Knapsack Prims Kruskals 151009141018 Lva1 App6892Document21 pagesGreedyalgorithm Makingchange Knapsack Prims Kruskals 151009141018 Lva1 App6892For allNo ratings yet
- Analysis of Algorithms CS 477/677: Linear Sorting Instructor: George BebisDocument38 pagesAnalysis of Algorithms CS 477/677: Linear Sorting Instructor: George BebisShirly JaimesNo ratings yet
- Quan Gen Animal ModelDocument6 pagesQuan Gen Animal Modelnecamo1980No ratings yet
- Lect 7 and 8. Constraint Satisfaction ProblemDocument88 pagesLect 7 and 8. Constraint Satisfaction Problemdarakhshan syedNo ratings yet
- Propositional Logic (Part-2) : Dr. Abdelaziz SaidDocument36 pagesPropositional Logic (Part-2) : Dr. Abdelaziz SaidMohamed FassalNo ratings yet
- Chapter 3: Discrete Distributions: Probability and Statistics For Science and Engineering With Examples in R Hongshik AhnDocument44 pagesChapter 3: Discrete Distributions: Probability and Statistics For Science and Engineering With Examples in R Hongshik AhnSudat KhanNo ratings yet
- 6.1 Antiderivatives With Slope Fields: y X y XDocument73 pages6.1 Antiderivatives With Slope Fields: y X y XwiraNo ratings yet
- G G G G G G' G G G' G': Steps For Hands-On Reliability Analysis Involving Correlated NormalsDocument8 pagesG G G G G G' G G G' G': Steps For Hands-On Reliability Analysis Involving Correlated NormalsAshraf KhanNo ratings yet
- Determination of Crystal Structure (Chapt. 10)Document20 pagesDetermination of Crystal Structure (Chapt. 10)Daniel GarciaNo ratings yet
- CSC 550: Introduction To Artificial Intelligence Fall 2004: AI As SearchDocument25 pagesCSC 550: Introduction To Artificial Intelligence Fall 2004: AI As SearchryanNo ratings yet
- Handout 9 - Sensitivity Analysis PDFDocument30 pagesHandout 9 - Sensitivity Analysis PDFJasmine Athifa AzzahraNo ratings yet
- Distance Vector and Path Vector Rou3ng: Sec3ons 4.2.2., 4.3.2, 4.3.3Document25 pagesDistance Vector and Path Vector Rou3ng: Sec3ons 4.2.2., 4.3.2, 4.3.3Hari CNo ratings yet
- Autodock Scoring FunctionDocument43 pagesAutodock Scoring FunctionkarthishanmugamNo ratings yet
- Lecture3 Annotated Poles Block DiagramsDocument32 pagesLecture3 Annotated Poles Block DiagramsJoseph AndrewesNo ratings yet
- Math 2004 NotesDocument79 pagesMath 2004 NotesAliNo ratings yet
- 06 Least Squar RegressionDocument25 pages06 Least Squar RegressionManibharathi DNo ratings yet
- Relational Algebra: CS 186 Spring 2006, Lecture 8 R & G, Chapter 4Document30 pagesRelational Algebra: CS 186 Spring 2006, Lecture 8 R & G, Chapter 4dnlkabaNo ratings yet
- Simple Linear RegressionDocument51 pagesSimple Linear RegressionWaseem Javaid SoomroNo ratings yet
- Balanced Incomplete BlockDocument4 pagesBalanced Incomplete BlockItalo GranatoNo ratings yet
- Javakuka: Create KUKA Robot Language (KRL) Codes With JavaDocument28 pagesJavakuka: Create KUKA Robot Language (KRL) Codes With JavaSergei KublanovNo ratings yet
- Lect - 04 ch04Document41 pagesLect - 04 ch04Amro AbosaifNo ratings yet
- Cse 4 Sem Theoretical Foundations of Computer Science Winter 2018Document4 pagesCse 4 Sem Theoretical Foundations of Computer Science Winter 2018pwasu12350No ratings yet
- 2 Exhaustive Search AIDocument35 pages2 Exhaustive Search AIfahadabdulla011No ratings yet
- Transformation DataDocument13 pagesTransformation DataHeru WiryantoNo ratings yet
- Simple Linear Regression and CorrelationDocument50 pagesSimple Linear Regression and CorrelationtesfuNo ratings yet
- Finite Constraint DomainsDocument77 pagesFinite Constraint Domainssm-malikNo ratings yet
- DQ TransformationDocument51 pagesDQ Transformationसुमित नेमा50% (2)
- DQ TransformationDocument51 pagesDQ TransformationAili LuggymixNo ratings yet
- Floyd-Warshall Algorithm - WikipediaDocument8 pagesFloyd-Warshall Algorithm - WikipediaAnu VarshiniNo ratings yet
- Problem Set 5Document2 pagesProblem Set 5Luca VanzNo ratings yet
- Use A Triple Integral To Find The Volume of The Solid Within The Cylinder X 2 + y 2 9 and Between The Planes Z 1 and X + Z 5.Document2 pagesUse A Triple Integral To Find The Volume of The Solid Within The Cylinder X 2 + y 2 9 and Between The Planes Z 1 and X + Z 5.ziniaafrin1988No ratings yet
- State Space Search.: Course Home Page Home PageDocument10 pagesState Space Search.: Course Home Page Home PageLukeNo ratings yet
- Dijkstra's AlgorithmDocument44 pagesDijkstra's AlgorithmDevotional SongsNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- IJEST Special Issue CompleteDocument208 pagesIJEST Special Issue CompleteUkemebookieNo ratings yet
- AI LAB 3bDocument17 pagesAI LAB 3bMAYURI PAWARNo ratings yet
- tp2 Katia BouzidDocument11 pagestp2 Katia Bouzidbouzidkatia21No ratings yet
- Tabu Search: HW/SW-Codesign / System Synthesis - 1Document3 pagesTabu Search: HW/SW-Codesign / System Synthesis - 1Ashwin MahoneyNo ratings yet
- Computers & Industrial Engineering: Rosmalina Hanafi, Erhan KozanDocument9 pagesComputers & Industrial Engineering: Rosmalina Hanafi, Erhan Kozananandsingh868No ratings yet
- Development of Car Plate Number Generation System Using Tabu Search AlgorithmDocument3 pagesDevelopment of Car Plate Number Generation System Using Tabu Search Algorithmmafuz biolaNo ratings yet
- Facility Location and Scale Optimization in Closed Loop Supply ChainDocument20 pagesFacility Location and Scale Optimization in Closed Loop Supply ChainOMER HIMLER OLORTEGUI HARONo ratings yet
- The Computer Aided System For Planning Efficient Routes: Purdue E-PubsDocument61 pagesThe Computer Aided System For Planning Efficient Routes: Purdue E-PubsMadhan ReddyNo ratings yet
- (Cesar - Rego - and - Bahrain - Alidaee) - Metaheuristic - Optimization Via Memory and Evolution. Tabu Search and Scatter Search - 2005Document472 pages(Cesar - Rego - and - Bahrain - Alidaee) - Metaheuristic - Optimization Via Memory and Evolution. Tabu Search and Scatter Search - 2005Dairon Martiatu Galvan100% (2)
- OptQuest OptimizationDocument28 pagesOptQuest OptimizationMano KanthanathanNo ratings yet
- Paper 12-Application of The Tabu Search AlgorithmDocument6 pagesPaper 12-Application of The Tabu Search AlgorithmAbdul Nayeem KhalidNo ratings yet
- Classical and Modern Heuristics For The Vehicle Routing ProblemDocument17 pagesClassical and Modern Heuristics For The Vehicle Routing ProblemguidelliNo ratings yet
- Chapter 9: CROSSOVERDocument15 pagesChapter 9: CROSSOVERMorteza SharafiNo ratings yet
- Telecommunications OptimizationDocument381 pagesTelecommunications OptimizationHitesh ChavanNo ratings yet
- A New Hybrid Localization Approach in Wireless Sensor Networks Based On Particle Swarm Optimization and Tabu SearchDocument16 pagesA New Hybrid Localization Approach in Wireless Sensor Networks Based On Particle Swarm Optimization and Tabu SearchLandry John MELINo ratings yet
- Predicting Bankruptcy Using Tabu SearchDocument11 pagesPredicting Bankruptcy Using Tabu Searchjoescribd55No ratings yet
- A Tabu Search AlgorithmDocument19 pagesA Tabu Search Algorithmmmaruys2No ratings yet
- European Journal of Operational Research: Zhipeng Lü, Jin-Kao HaoDocument10 pagesEuropean Journal of Operational Research: Zhipeng Lü, Jin-Kao HaoMr. NobodyNo ratings yet
- A Tabu Search Heuristic For The Truck and Trailer Routing ProblemDocument16 pagesA Tabu Search Heuristic For The Truck and Trailer Routing ProblemAjyuk J RajNo ratings yet
- Parallel Ant Colonies For Combinatorial Optimization ProblemsDocument9 pagesParallel Ant Colonies For Combinatorial Optimization ProblemsAdrian George NăstaseNo ratings yet
- Travelling Sales Man Problem Using Tabu SearchDocument9 pagesTravelling Sales Man Problem Using Tabu SearchSube Singh InsanNo ratings yet
- Journal of Cleaner Production: Yong Shi, Yanjie Zhou, Wenhui Ye, Qian Qian ZhaoDocument24 pagesJournal of Cleaner Production: Yong Shi, Yanjie Zhou, Wenhui Ye, Qian Qian ZhaoM. Alfi ZahamsyahNo ratings yet
- A Framework For Solving Time Dependent Vehicle Routing Problem With Time WindowsDocument24 pagesA Framework For Solving Time Dependent Vehicle Routing Problem With Time WindowsAlper SarıcıoğluNo ratings yet
- Sustainability 14 08661Document22 pagesSustainability 14 08661i gede arei banyupramestaNo ratings yet
- Making Decisions With SimulationsDocument25 pagesMaking Decisions With Simulationsradi krikabNo ratings yet
- The Multiobjective Multidimensional Knapsack Problem: A Survey and A New ApproachDocument24 pagesThe Multiobjective Multidimensional Knapsack Problem: A Survey and A New ApproachVigneshwar NatesanNo ratings yet
- Unit Commitment-A Bibliographical SurveyDocument10 pagesUnit Commitment-A Bibliographical SurveyPavithra Sudharsan100% (1)
- Proyecto Heuristic LabDocument17 pagesProyecto Heuristic LabLeonor PriegoNo ratings yet
- Optimization of Rider Scheduling For A Food DeliveDocument17 pagesOptimization of Rider Scheduling For A Food Delivedihosid99No ratings yet
- A Literature Review On The Vehicle Routing Problem With Multiple Depepots PDFDocument15 pagesA Literature Review On The Vehicle Routing Problem With Multiple Depepots PDFcarandatruNo ratings yet