You might also like
- Friction and Lubrication in Mechanical DesignDocument569 pagesFriction and Lubrication in Mechanical DesignFernanda Boulhosa Rodamilans75% (4)
- A Handbook: Epicyclic GearingDocument8 pagesA Handbook: Epicyclic GearingrafeipNo ratings yet
- Oscillation SDocument47 pagesOscillation SGomesNo ratings yet
- Biaxial Bending in ColumnsDocument14 pagesBiaxial Bending in Columnsnvnrev100% (1)
- Design Report of Retaining WallDocument37 pagesDesign Report of Retaining WallShivsagar yadav100% (1)
- CU Quantum Social Science 1107012821 PDFDocument306 pagesCU Quantum Social Science 1107012821 PDFBreilla ZanonNo ratings yet
- International Standard: Test Code For Machine Tools - Determination of The Noise EmissionDocument11 pagesInternational Standard: Test Code For Machine Tools - Determination of The Noise EmissionAnonymous 2SQDbt2No ratings yet
- 053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Document116 pages053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Ankit Jose Antony0% (1)
- 2.1 Describing MotionDocument25 pages2.1 Describing MotionncvpsCR100% (2)
- 2-Col Bent On Bored PilesDocument29 pages2-Col Bent On Bored PilesHenry DiyokeNo ratings yet
- Oscillation SDocument7 pagesOscillation STang Moon KweNo ratings yet
- Ch.14 Oscillations NotesDocument8 pagesCh.14 Oscillations NotesEducation PointNo ratings yet
- Harmonic OscillatorDocument11 pagesHarmonic OscillatorFelixNo ratings yet
- PppoDocument8 pagesPpposandykiller420No ratings yet
- CH15 Oscillatory Motion and WavesDocument5 pagesCH15 Oscillatory Motion and WavesJunLi CaiNo ratings yet
- 1-Waves and OpticsDocument29 pages1-Waves and Opticsrashidali bajkaniNo ratings yet
- 301 CHP7Document27 pages301 CHP7aleenhaidarNo ratings yet
- Simple Harmonic Motion - WikipediaDocument10 pagesSimple Harmonic Motion - WikipediaDuy Khanh NguyễnNo ratings yet
- L4 Momentum Analysis of Flow SystemsDocument19 pagesL4 Momentum Analysis of Flow SystemsEd Walter P. MaghanoyNo ratings yet
- Mechanical Vibration Lab: Faculty of Engineering Mechanical Engineering DepartmentDocument64 pagesMechanical Vibration Lab: Faculty of Engineering Mechanical Engineering DepartmentMuhammad Haris KhanNo ratings yet
- Oscillation Notes Neet - PDF 44Document13 pagesOscillation Notes Neet - PDF 44merrythomas873No ratings yet
- Vib Eng Research2Document9 pagesVib Eng Research2Rondio LopezNo ratings yet
- Simple Harmonic MotionDocument8 pagesSimple Harmonic MotionPratul NijhawanNo ratings yet
- Oscillation SDocument91 pagesOscillation SGarlapati Srinivasa RaoNo ratings yet
- CHAPTER 14 - Oscillations - PramadaDocument12 pagesCHAPTER 14 - Oscillations - PramadaAnhad SinghNo ratings yet
- Chapter 3 SHM - (Week 4)Document28 pagesChapter 3 SHM - (Week 4)SARA EMELIN FARISHA MUHAMAD FARIDNo ratings yet
- Chapter 1Document7 pagesChapter 1Zandrei AlmedaNo ratings yet
- Chapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VDocument7 pagesChapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VJohnBenardNo ratings yet
- Introduction To Nanoscience and NanotechnologyDocument35 pagesIntroduction To Nanoscience and NanotechnologybokumonNo ratings yet
- OCR A Physics A-Level: Topic 5.4: OscillationsDocument4 pagesOCR A Physics A-Level: Topic 5.4: OscillationsjmsonlNo ratings yet
- OdeDocument10 pagesOde林格屹No ratings yet
- Waves and Optics - ReviewerDocument15 pagesWaves and Optics - ReviewerJoshua QuimsonNo ratings yet
- (Notes) DP024 - Topic 1Document33 pages(Notes) DP024 - Topic 1MUHAMAD MUZAMMIL HAKIMI BIN HUSEIN MoeNo ratings yet
- 3.2 Forced Harmonic OscillationsDocument11 pages3.2 Forced Harmonic OscillationsKseniia KrupchakNo ratings yet
- Chapter 6 FMDocument52 pagesChapter 6 FMZeeshan MughalNo ratings yet
- Simple Harmonic MotionDocument6 pagesSimple Harmonic MotionRavi InderNo ratings yet
- Equations of Motion For A Single Degree-Of-Freedom SystemDocument42 pagesEquations of Motion For A Single Degree-Of-Freedom SystemFernanda LagoNo ratings yet
- Group1 Free-VibrationDocument86 pagesGroup1 Free-VibrationRonaldRajumNo ratings yet
- OscillationsDocument47 pagesOscillationsrohilsingh01No ratings yet
- Chapter 1 Part 4Document36 pagesChapter 1 Part 4NUR AYUNI WADHIHA BINTI MOHD IRWAN SHAH MoeNo ratings yet
- Questions For InvestmentDocument113 pagesQuestions For InvestmentElfin AntoNo ratings yet
- Equations of Motion For A Single Degree-Of-Freedom SystemDocument41 pagesEquations of Motion For A Single Degree-Of-Freedom SystemBhind NijjarNo ratings yet
- Oscillations of A Simple Pendulum With Extremely l-1Document11 pagesOscillations of A Simple Pendulum With Extremely l-1marinko.micunovicNo ratings yet
- PhsucsDocument1 pagePhsucsRaashed RamzanNo ratings yet
- Dynamic Meteorology IMTCDocument38 pagesDynamic Meteorology IMTCASNMURTYNo ratings yet
- Momentum Analysis of Flow Systems: Hasan Hac IşevkiDocument52 pagesMomentum Analysis of Flow Systems: Hasan Hac IşevkiMuhammad UsamaNo ratings yet
- AcousticsDocument23 pagesAcousticsNadheen AnNo ratings yet
- Momentum Analysis Of: Flow SystemsDocument53 pagesMomentum Analysis Of: Flow SystemsomarNo ratings yet
- Advanced Structural Dynamics: Project Coordinator StudentDocument12 pagesAdvanced Structural Dynamics: Project Coordinator StudentAlin NegarăNo ratings yet
- Unit 1 Oscillation, Ultrasonics and Dieletrical Material - Physic-1Document16 pagesUnit 1 Oscillation, Ultrasonics and Dieletrical Material - Physic-1All About Youtuber'sNo ratings yet
- OSCILLATIONDocument38 pagesOSCILLATIONnikita.22ba34No ratings yet
- The Principles of DynamicsDocument18 pagesThe Principles of Dynamicsafshin kkNo ratings yet
- General Physics 1 Quarter 2: Module 3Document9 pagesGeneral Physics 1 Quarter 2: Module 3Maria Kriselle ApuhinNo ratings yet
- Simple Harmonic Motion (5 Hours) : DT X DDocument13 pagesSimple Harmonic Motion (5 Hours) : DT X DNur Farhana SuhaimiNo ratings yet
- Simple Harmonic Motion-WikipediaDocument21 pagesSimple Harmonic Motion-WikipediaSiva PradyumnaNo ratings yet
- MvneDocument125 pagesMvnesunilNo ratings yet
- Phy210 Chapter 3 (Part 1) PDFDocument40 pagesPhy210 Chapter 3 (Part 1) PDFAidatul HusnaNo ratings yet
- Q2W6 Periodic MotionDocument78 pagesQ2W6 Periodic Motionhikkiro hikkiNo ratings yet
- Mechanical Vibrations (10me72)Document167 pagesMechanical Vibrations (10me72)swetha shree chavan mNo ratings yet
- Oscillations and The Simple Harmonic Motion (SHM) ModelDocument4 pagesOscillations and The Simple Harmonic Motion (SHM) ModelAsim KunduNo ratings yet
- PhysicsDocument11 pagesPhysicsRalph TomultoNo ratings yet
- Concepts of Laws of Motion (L.O.M.) Physics For JEE & NEET 2019Document5 pagesConcepts of Laws of Motion (L.O.M.) Physics For JEE & NEET 2019misostudyNo ratings yet
- Class NotesDocument30 pagesClass NotesRashmikaNo ratings yet
- Angular Momentum - Wikipedia PDFDocument15 pagesAngular Momentum - Wikipedia PDFPuneet PriyangueNo ratings yet
- Resonance: Resonance Describes The Phenomenon of Increased Amplitude That Occurs WhenDocument10 pagesResonance: Resonance Describes The Phenomenon of Increased Amplitude That Occurs WhenLijukrishnanNo ratings yet
- Unit I PDFDocument15 pagesUnit I PDFarunachelamNo ratings yet
- Me420 Mechanical Vibration and Acoustics Multi-Degree of Freedom SystemsDocument47 pagesMe420 Mechanical Vibration and Acoustics Multi-Degree of Freedom SystemsRobin SinghNo ratings yet
- General Expressions For Flow Through Beds in Terms of Carman-Kozeny EquationsDocument6 pagesGeneral Expressions For Flow Through Beds in Terms of Carman-Kozeny Equationsحاتم غيدان خلفNo ratings yet
- .In-Deduction of Gas Laws From Kinetic TheoryDocument2 pages.In-Deduction of Gas Laws From Kinetic TheoryMridul BhaskarNo ratings yet
- Pinho Et Al 2012 Material and Structural Response of Polymer Matrix Fibre Reinforced CompositesDocument30 pagesPinho Et Al 2012 Material and Structural Response of Polymer Matrix Fibre Reinforced CompositesRares MiricaNo ratings yet
- Thermal MCQDocument42 pagesThermal MCQRanjeet KumarNo ratings yet
- Feap Training ManualDocument203 pagesFeap Training ManualGiorgio ZavariseNo ratings yet
- Analysis of Temperature Loss of Hot Metal During Hot Rolling Process at Steel PlantDocument7 pagesAnalysis of Temperature Loss of Hot Metal During Hot Rolling Process at Steel PlantIJMERNo ratings yet
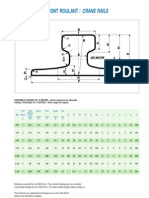
- Crane RailsDocument2 pagesCrane Rails_at_to_100% (1)
- Building Construction 1 - 5 - Floors Vaults PDFDocument33 pagesBuilding Construction 1 - 5 - Floors Vaults PDFDamjanNo ratings yet
- Assessment QuizDocument6 pagesAssessment QuizHeiro KeystrifeNo ratings yet
- Vortex Drop ShaftDocument9 pagesVortex Drop ShaftMarco PazNo ratings yet
- P15.3 Teacher Literacy Sheet: Magnetism and ElectromagnetismDocument2 pagesP15.3 Teacher Literacy Sheet: Magnetism and ElectromagnetismBenjamin WatsonNo ratings yet
- EXERCISE 11.1: (Answer Key With Explanation)Document24 pagesEXERCISE 11.1: (Answer Key With Explanation)John MarksNo ratings yet
- Advanced Structural GeologyDocument3 pagesAdvanced Structural Geologyabnou_223943920No ratings yet
- Sec 7Document32 pagesSec 7Diego Castillo JaramilloNo ratings yet
- Practical No-5 (Curvilinear Motion)Document8 pagesPractical No-5 (Curvilinear Motion)Jay V. GoyelNo ratings yet
- Solved - The State of Plane Stress Shown Is Expected in An Alu-I... PDFDocument3 pagesSolved - The State of Plane Stress Shown Is Expected in An Alu-I... PDFTafseer-e-QuranNo ratings yet
- Unit Influence Lines FOR Statically Determinate Beams: StructureDocument34 pagesUnit Influence Lines FOR Statically Determinate Beams: StructureRaj BakhtaniNo ratings yet
- Forces in ActionDocument23 pagesForces in Actionapi-422428700100% (1)
- Lecture 11-12 - Basic Aerodynamics Speedof Sound Mach NumberDocument12 pagesLecture 11-12 - Basic Aerodynamics Speedof Sound Mach NumberAli RazaNo ratings yet
- Honeycomb Beam & Panel Calculations XLV1 - 2Document29 pagesHoneycomb Beam & Panel Calculations XLV1 - 2Krishant Krishant Krishant0% (1)
- Pages From Chapter 18-6Document10 pagesPages From Chapter 18-6taNo ratings yet