You might also like
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsFrom EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsNo ratings yet
- Effect of Beam Dimensions On Structural Performance of Wide Beam-Column JointsDocument7 pagesEffect of Beam Dimensions On Structural Performance of Wide Beam-Column JointsRafa SouzaNo ratings yet
- Effect of Reinforcement On The Failure Load of RC Beams: Osama Salem, Arafa El-HellotyDocument16 pagesEffect of Reinforcement On The Failure Load of RC Beams: Osama Salem, Arafa El-HellotyHesham EdressNo ratings yet
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- REWERS I - Numerical Analysis of RC Beam With High Strength Steel REinforcement Using CDP ModelDocument11 pagesREWERS I - Numerical Analysis of RC Beam With High Strength Steel REinforcement Using CDP Modelno_milk_todayNo ratings yet
- Testing of A Laterally Stable Eccentrically Braced Frame For Steel Bridge PiersDocument6 pagesTesting of A Laterally Stable Eccentrically Braced Frame For Steel Bridge PiersFlorian GranceaNo ratings yet
- Strength Curves For Web Crippling DesignDocument6 pagesStrength Curves For Web Crippling Designuhu_plus6482No ratings yet
- The Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryFrom EverandThe Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryNo ratings yet
- ANSYS BOLT Proceedings-63-00010-V4Document9 pagesANSYS BOLT Proceedings-63-00010-V4ricardovomNo ratings yet
- Study of Rigid Bolt Joint in Beam-Column Connection of Gabled Portal FramesDocument6 pagesStudy of Rigid Bolt Joint in Beam-Column Connection of Gabled Portal FramesadilanwararNo ratings yet
- Farkas, Jármai (2003) - Cost Comparison of Bolted and Welded Frame JointsDocument7 pagesFarkas, Jármai (2003) - Cost Comparison of Bolted and Welded Frame JointsGogyNo ratings yet
- Cyclic Strut & Tie Modelling of Simple Reinforced Concrete StructuresDocument8 pagesCyclic Strut & Tie Modelling of Simple Reinforced Concrete StructuresGloomsyNo ratings yet
- Mf8761-End Sem QPDocument9 pagesMf8761-End Sem QPPriyadharshan RNo ratings yet
- Nonlinear RC Beam Analysis Using Moment-Curvature RelationsDocument14 pagesNonlinear RC Beam Analysis Using Moment-Curvature RelationsSamia ChowdhuryNo ratings yet
- Seismic assessment of deficient steel braced frames with built-up back-to-back double angle bracesDocument9 pagesSeismic assessment of deficient steel braced frames with built-up back-to-back double angle bracesakanyilmazNo ratings yet
- Finite Element Analysis and Model Validation of Shear Deficient Reinforced Concrete Beams Strengthened With GFRP LaminatesDocument11 pagesFinite Element Analysis and Model Validation of Shear Deficient Reinforced Concrete Beams Strengthened With GFRP LaminatesZiyad12No ratings yet
- Parametric Studies of Steel Cold-Formed Section Beam To Column Moment Connections With Self-Drilling ScrewsDocument11 pagesParametric Studies of Steel Cold-Formed Section Beam To Column Moment Connections With Self-Drilling ScrewsAhmed SalehNo ratings yet
- r891 PDFDocument16 pagesr891 PDFlyeshiunNo ratings yet
- AUEJ - Volume 13 - Issue 49 - Pages 1392-1403Document13 pagesAUEJ - Volume 13 - Issue 49 - Pages 1392-1403محمد حسن محمد حسنNo ratings yet
- Analysis of PC Beam With Corrugated Steel Web Using Accordion Link ElementDocument2 pagesAnalysis of PC Beam With Corrugated Steel Web Using Accordion Link ElementNegin MalekiNo ratings yet
- Mace 60035Document7 pagesMace 60035eng_ayman_H_MNo ratings yet
- Fracture Analysis of a Square Steel Tube Using Finite Element MethodDocument9 pagesFracture Analysis of a Square Steel Tube Using Finite Element MethodAlbert AlmeidaNo ratings yet
- Lap Welded Joint - Apostolopoulos-DimitrovDocument7 pagesLap Welded Joint - Apostolopoulos-Dimitrovaditya2053No ratings yet
- Required Thickness of Flexurally Rigid Baseplate For Anchor FasteningsDocument8 pagesRequired Thickness of Flexurally Rigid Baseplate For Anchor FasteningsCarsonBakerNo ratings yet
- Finite Element Simulation of Low Concrete Strength Beam Beam-Column Joint Strengthened With CFRPDocument10 pagesFinite Element Simulation of Low Concrete Strength Beam Beam-Column Joint Strengthened With CFRPlalitha kandikaNo ratings yet
- Coneccion Ansys DisipadorDocument8 pagesConeccion Ansys DisipadorHectoreRodriguezlNo ratings yet
- 24 2 4guangfeng ZhangDocument12 pages24 2 4guangfeng Zhangwii2001No ratings yet
- Modeling Repaired Composite StructuresDocument14 pagesModeling Repaired Composite StructuresVicky VigneshNo ratings yet
- SMAR2013fullpaper - SonDocument8 pagesSMAR2013fullpaper - SonStalin Leandro Mejía VacaNo ratings yet
- Design of Anchor Plates Based On The Component Method Rybinski & KulhmannDocument12 pagesDesign of Anchor Plates Based On The Component Method Rybinski & KulhmannvcKampNo ratings yet
- Experimental and Numerical Study On Softening and Pinching Effects of Reinforced Concrete FrameDocument5 pagesExperimental and Numerical Study On Softening and Pinching Effects of Reinforced Concrete FrameIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Journal of Constructional Steel Research: E.L. Tan, B. UyDocument10 pagesJournal of Constructional Steel Research: E.L. Tan, B. UyvenkatesanjsNo ratings yet
- Numerical investigation of RC beam-column connections under monotonic loadsDocument8 pagesNumerical investigation of RC beam-column connections under monotonic loadsCarter KandouNo ratings yet
- Design of Vertical BracingDocument4 pagesDesign of Vertical BracingSz GuoNo ratings yet
- Finite Element Analysis of Reinforced Concrete Beams Strengthened With CFRP in FlexuralDocument17 pagesFinite Element Analysis of Reinforced Concrete Beams Strengthened With CFRP in FlexuralZoran VasicNo ratings yet
- S & A Lab Set - 1Document11 pagesS & A Lab Set - 1raveen_82mechNo ratings yet
- Bolt Preload Scatter and Relaxation Behaviour During Tightening A 4 In-900# Flange Joint With Spiral Wound GasketDocument12 pagesBolt Preload Scatter and Relaxation Behaviour During Tightening A 4 In-900# Flange Joint With Spiral Wound Gasketfra.cangioli4786No ratings yet
- Corrugated Web BeamDocument4 pagesCorrugated Web BeamNegin MalekiNo ratings yet
- Failure_analysis_of_bolted_steel_flangesDocument7 pagesFailure_analysis_of_bolted_steel_flangesjcrosaNo ratings yet
- UB As ColumnsDocument16 pagesUB As ColumnssuvraNo ratings yet
- 13chapter STEEL-CONCRETE COMPOSITE STRUCTURAL MEMBERSDocument23 pages13chapter STEEL-CONCRETE COMPOSITE STRUCTURAL MEMBERSTarif Aziz MarufNo ratings yet
- Lee2008 Elbow LWTDocument5 pagesLee2008 Elbow LWTKurra SrikanthNo ratings yet
- Admin, WehrDocument6 pagesAdmin, WehrAnonymous hprsT3WlPNo ratings yet
- Buckling Analysis Design of Steel FramesDocument0 pagesBuckling Analysis Design of Steel FramestangkokhongNo ratings yet
- Earthquake-Resistance Design of Double-Angle BracingsDocument15 pagesEarthquake-Resistance Design of Double-Angle BracingsJoseph Cristhian Lipa FloresNo ratings yet
- Advance Design - Bracing Members Design According To Eurocode 3Document8 pagesAdvance Design - Bracing Members Design According To Eurocode 3gemo_n_fabrice69No ratings yet
- Corbel Design PaperDocument13 pagesCorbel Design Paperkapola100% (2)
- Strength and Ductility of Concrete Encased Composite Beams: DR - Ammar A. AliDocument14 pagesStrength and Ductility of Concrete Encased Composite Beams: DR - Ammar A. AliKrishanu BarikNo ratings yet
- Component method for analyzing historical timber jointsDocument8 pagesComponent method for analyzing historical timber jointsArthur RebouçasNo ratings yet
- Member Stiffness and Contact Pressure Distribution of Bolted JointsDocument8 pagesMember Stiffness and Contact Pressure Distribution of Bolted JointsreaderScribd9100% (1)
- Advanced Procedures For Design of Bolted ConnectionsDocument8 pagesAdvanced Procedures For Design of Bolted Connectionsbramo96No ratings yet
- A New Design Equation For Predicting The Joint Shear Strength of Mono Tonic Ally Loaded Exterior Beam-Column JointsDocument13 pagesA New Design Equation For Predicting The Joint Shear Strength of Mono Tonic Ally Loaded Exterior Beam-Column JointsMatheus FernandesNo ratings yet
- Gusset Plate Stability Using Variable Stress TrajectoriesDocument6 pagesGusset Plate Stability Using Variable Stress TrajectoriestmaNo ratings yet
- PDF Compression, Ocr, Web-Optimization With Cvision'S PdfcompressorDocument5 pagesPDF Compression, Ocr, Web-Optimization With Cvision'S Pdfcompressorpn0% (1)
- Structure Base JCSRDocument46 pagesStructure Base JCSRivan bolañosNo ratings yet
- Advanced Finite Element Modelling of Composite Beams With High Strength Materials and Deformable Shear ConnectorsDocument9 pagesAdvanced Finite Element Modelling of Composite Beams With High Strength Materials and Deformable Shear Connectorselenour beautyNo ratings yet
- Failure Analysis of Bolted Steel Flanges PDFDocument6 pagesFailure Analysis of Bolted Steel Flanges PDFmoha100% (1)
- Seismic Design of Industrial Structures - PDFDocument73 pagesSeismic Design of Industrial Structures - PDFআকাশআহসান100% (1)
- Macedo Et Al-2017-Ce/papersDocument10 pagesMacedo Et Al-2017-Ce/papersCuneyt VatanseverNo ratings yet
- Couchaux Et Al-2017-Ce/papersDocument10 pagesCouchaux Et Al-2017-Ce/papersCuneyt VatanseverNo ratings yet
- Seismic Design of Full-Strength Full-Ductility Extended Endplate Beam-To-Column JointsDocument10 pagesSeismic Design of Full-Strength Full-Ductility Extended Endplate Beam-To-Column JointsCuneyt VatanseverNo ratings yet
- Gryniewicz Et Al-2017-Ce/papersDocument10 pagesGryniewicz Et Al-2017-Ce/papersCuneyt VatanseverNo ratings yet
- Applied Soil Mechanics With ABAQUS ApplicationsDocument398 pagesApplied Soil Mechanics With ABAQUS ApplicationsSoumya Bhattacharyya100% (2)
- Book EngDocument293 pagesBook EngsergiuardeleanNo ratings yet
- Seismic Design and Performance of Compos PDFDocument23 pagesSeismic Design and Performance of Compos PDFCuneyt VatanseverNo ratings yet
- Pseudo-Dynamic Testing of A 3D Full-Scal PDFDocument15 pagesPseudo-Dynamic Testing of A 3D Full-Scal PDFCuneyt VatanseverNo ratings yet
- Davies, M.W - Theory and Practice of Bridge Construction in Timber, Iron and Steel (1908, ICE) PDFDocument607 pagesDavies, M.W - Theory and Practice of Bridge Construction in Timber, Iron and Steel (1908, ICE) PDFCuneyt VatanseverNo ratings yet
- Eurocode 3 ActionsDocument158 pagesEurocode 3 ActionsKeeran Montag100% (7)
- Fabricators' and Erectors' Guide To Welded Steel Construction - 1999 (Structural Welding)Document58 pagesFabricators' and Erectors' Guide To Welded Steel Construction - 1999 (Structural Welding)johnknight000No ratings yet
- Saptamsa and Navamsa Charts PDFDocument37 pagesSaptamsa and Navamsa Charts PDFjyothiNo ratings yet
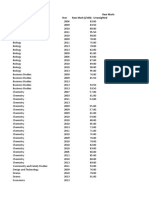
- Raw To Scaled Mark DatabaseDocument10 pagesRaw To Scaled Mark DatabaseKelly ChuNo ratings yet
- Chapter 1-Introduction To Green BuildingsDocument40 pagesChapter 1-Introduction To Green Buildingsniti860No ratings yet
- BBC Learning English 6 Minute English Day-Trip With A DifferenceDocument4 pagesBBC Learning English 6 Minute English Day-Trip With A DifferenceAsefeh KianiNo ratings yet
- BD645, BD647, BD649, BD651 NPN Silicon Power DarlingtonsDocument4 pagesBD645, BD647, BD649, BD651 NPN Silicon Power DarlingtonsErasmo Franco SNo ratings yet
- 3-5 Support Document - Phase IDocument38 pages3-5 Support Document - Phase Iapi-290854496No ratings yet
- 2010 IMCO CatalogDocument170 pages2010 IMCO Cataloggeav25653855No ratings yet
- Quantum ComputingDocument2 pagesQuantum Computingakshit100% (3)
- Basic Electrical-Chapter 3 TheoryDocument13 pagesBasic Electrical-Chapter 3 TheorySankar RijalNo ratings yet
- Experiment No. 2 Introduction To Combinational Circuits: Group Name: Group 7 Group Leader: JOSE DOROSAN Group MemberDocument11 pagesExperiment No. 2 Introduction To Combinational Circuits: Group Name: Group 7 Group Leader: JOSE DOROSAN Group MemberJoy PeconcilloNo ratings yet
- XZ100 Partsbook Part2-'09YMDocument60 pagesXZ100 Partsbook Part2-'09YMBikeMaKer BMKNo ratings yet
- Interview Presentations: Steps For Interview Presentation SuccessDocument3 pagesInterview Presentations: Steps For Interview Presentation SuccessAditya SharmaNo ratings yet
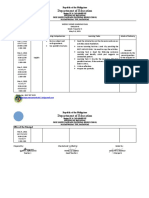
- Department of Education: Republic of The PhilippinesDocument4 pagesDepartment of Education: Republic of The PhilippinesEllen Cabatian BanaguasNo ratings yet
- Thefold74 Brooch 1 From Square TubisDocument3 pagesThefold74 Brooch 1 From Square TubisAdriana GranadaNo ratings yet
- Alayo, M. Internationalization and Entrepreneurial Orientation of Family SMEs The Influence of The Family CharacterArticle 2019Document12 pagesAlayo, M. Internationalization and Entrepreneurial Orientation of Family SMEs The Influence of The Family CharacterArticle 2019Riezz MauladiNo ratings yet
- Consumer Preference Towards Reliance JioDocument61 pagesConsumer Preference Towards Reliance JioSparshRajNo ratings yet
- Lagnas CharacterDocument14 pagesLagnas CharactertechkasambaNo ratings yet
- Lithium Carbonate Tablets USPDocument4 pagesLithium Carbonate Tablets USPCesar Alejandro Olguin MarquezNo ratings yet
- Name - Akshay Surange Reg No - 19MCA10049 Software Project Management Assignment 1Document5 pagesName - Akshay Surange Reg No - 19MCA10049 Software Project Management Assignment 1Akshay SurangeNo ratings yet
- Nomothetic Vs IdiographicDocument9 pagesNomothetic Vs IdiographicBhupesh ManoharanNo ratings yet
- Acknowledgements: Godrej & Boyce MFG - Co.LtdDocument83 pagesAcknowledgements: Godrej & Boyce MFG - Co.LtdSamarth TuliNo ratings yet
- GS Ep Saf 321 enDocument27 pagesGS Ep Saf 321 enHi PersonneNo ratings yet
- Measuring and managing intellectual capitalDocument6 pagesMeasuring and managing intellectual capitalAl-Farisi Ibnu EdyNo ratings yet
- Analysis of Morphogenesis in Hyphomycetes New CharDocument27 pagesAnalysis of Morphogenesis in Hyphomycetes New Charestefaniacb1305No ratings yet
- Human Strategies For A Virtual World: Baldwin BergesDocument32 pagesHuman Strategies For A Virtual World: Baldwin BergesmoisesNo ratings yet
- Tailor Welded BlanksDocument52 pagesTailor Welded BlanksYuvaraj YuvarajNo ratings yet
- Craig2016.traditions in Communication TheoryDocument10 pagesCraig2016.traditions in Communication TheoryDelia ConstandaNo ratings yet
- Teaching Styles in PE WCUDocument7 pagesTeaching Styles in PE WCUReliArceoNo ratings yet
- Create Database VentasDocument11 pagesCreate Database VentasAnonymous BwTccxNo ratings yet
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Advanced Modelling Techniques in Structural DesignFrom EverandAdvanced Modelling Techniques in Structural DesignRating: 5 out of 5 stars5/5 (3)
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsFrom EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (137)
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- Flow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesFrom EverandFlow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesTomomichi NakamuraRating: 4.5 out of 5 stars4.5/5 (4)
- Bridge Engineering: Classifications, Design Loading, and Analysis MethodsFrom EverandBridge Engineering: Classifications, Design Loading, and Analysis MethodsRating: 4 out of 5 stars4/5 (16)
- Engineering for Kids: Building and Construction Fun | Children's Engineering BooksFrom EverandEngineering for Kids: Building and Construction Fun | Children's Engineering BooksRating: 3 out of 5 stars3/5 (2)
- Advanced Design Examples of Seismic Retrofit of StructuresFrom EverandAdvanced Design Examples of Seismic Retrofit of StructuresRating: 1 out of 5 stars1/5 (1)
- Transmission Pipeline Calculations and Simulations ManualFrom EverandTransmission Pipeline Calculations and Simulations ManualRating: 4.5 out of 5 stars4.5/5 (10)
- Building Support Structures, 2nd Ed., Analysis and Design with SAP2000 SoftwareFrom EverandBuilding Support Structures, 2nd Ed., Analysis and Design with SAP2000 SoftwareRating: 4.5 out of 5 stars4.5/5 (15)
- Piezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringFrom EverandPiezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringNo ratings yet
- Built: The Hidden Stories Behind Our StructuresFrom EverandBuilt: The Hidden Stories Behind Our StructuresRating: 4 out of 5 stars4/5 (27)
- Structural Cross Sections: Analysis and DesignFrom EverandStructural Cross Sections: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (19)
- Marine Structural Design CalculationsFrom EverandMarine Structural Design CalculationsRating: 4.5 out of 5 stars4.5/5 (13)
- Natural Ventilation of Buildings: Theory, Measurement and DesignFrom EverandNatural Ventilation of Buildings: Theory, Measurement and DesignNo ratings yet
- Pipeline Planning and Construction Field ManualFrom EverandPipeline Planning and Construction Field ManualRating: 5 out of 5 stars5/5 (3)
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingFrom EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingNo ratings yet
- Design and Construction of Soil Anchor PlatesFrom EverandDesign and Construction of Soil Anchor PlatesRating: 5 out of 5 stars5/5 (1)