You might also like
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Implement SPWM with Arduino HILDocument10 pagesImplement SPWM with Arduino HILAbdullah Al MamunNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- PH.D Journal Paper - Eai.7-6-2021.2308767Document8 pagesPH.D Journal Paper - Eai.7-6-2021.2308767scribdjoejoeNo ratings yet
- DSP-Based AC-DC-AC Converter SPWM ControlDocument18 pagesDSP-Based AC-DC-AC Converter SPWM ControlSteve TranNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Buck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFDocument13 pagesBuck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFTariq KhanNo ratings yet
- Analysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerDocument8 pagesAnalysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerHitakshi GuptaNo ratings yet
- 2 15 1417426934 7.electrical IJEEER MATLABSIMULINKIMPLEMENTATIONAND KavitaNagarDocument13 pages2 15 1417426934 7.electrical IJEEER MATLABSIMULINKIMPLEMENTATIONAND KavitaNagarAbdullah Al MamunNo ratings yet
- A Modular Simulink-Based Controlled Three-Phase Switch Mode InverterDocument7 pagesA Modular Simulink-Based Controlled Three-Phase Switch Mode InverterLee EzzitouniNo ratings yet
- Grid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountDocument7 pagesGrid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountckrimyouNo ratings yet
- Matlab-Simulink Controller DesignDocument4 pagesMatlab-Simulink Controller DesignMohamed SomaiNo ratings yet
- UPS SystemDocument4 pagesUPS SystemMadhu JbNo ratings yet
- First Benchmack Model For HVDC Controls in ATP Program X SEPOPEDocument10 pagesFirst Benchmack Model For HVDC Controls in ATP Program X SEPOPEgiba_cNo ratings yet
- PSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)Document8 pagesPSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)luism_falconiNo ratings yet
- Design and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABDocument5 pagesDesign and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABJeannot MpianaNo ratings yet
- Application of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemDocument5 pagesApplication of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemRaghava KatreepalliNo ratings yet
- Detailed Modeling of CIGRÉ HVDC Benchmark System Using PSCADEMTDC and PSBSIMULINKDocument10 pagesDetailed Modeling of CIGRÉ HVDC Benchmark System Using PSCADEMTDC and PSBSIMULINKArturo Isidro Conde PérezNo ratings yet
- Development of A Smart LED Lighting System: Rapid Prototyping ScenarioDocument6 pagesDevelopment of A Smart LED Lighting System: Rapid Prototyping ScenariocarlosNo ratings yet
- MATLAB Co-Simulation Tools For Power Supply Systems Design: V. Boscaino, G. CapponiDocument4 pagesMATLAB Co-Simulation Tools For Power Supply Systems Design: V. Boscaino, G. CapponivboscainoNo ratings yet
- Variable Frequency Digital PWM Control For Low-Power Buck ConvertersDocument5 pagesVariable Frequency Digital PWM Control For Low-Power Buck Convertersantonytechno100% (1)
- Pspice and Simulink Co-Simulation For High Efficiency DC-DC Converter Using Slps Interface SoftwareDocument6 pagesPspice and Simulink Co-Simulation For High Efficiency DC-DC Converter Using Slps Interface SoftwareErik AlvarezNo ratings yet
- Two Loop Pi ControllerDocument12 pagesTwo Loop Pi ControllerSureshkumar AlagarsamyNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- A Matlahsimulink Tool For Power Converters Teaching A Power FacDocument5 pagesA Matlahsimulink Tool For Power Converters Teaching A Power FacRAJAN M SNo ratings yet
- UPS SystemDocument4 pagesUPS Systemमृत्युंजय झाNo ratings yet
- High-Performance Stand-Alone PV InverterDocument71 pagesHigh-Performance Stand-Alone PV InverterAidil AzharNo ratings yet
- MATLAB Simulation of 3-Level PWM Inverter Fed Motor Speed ControlDocument6 pagesMATLAB Simulation of 3-Level PWM Inverter Fed Motor Speed Controlraviraj_kumbhar1988No ratings yet
- Three-Phase Photovoltaic Grid-Connected Inverter Using dSPACE DS1104 PlatformDocument6 pagesThree-Phase Photovoltaic Grid-Connected Inverter Using dSPACE DS1104 PlatformBojan BankovicNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument8 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Medium Voltage Electrical System ReDocument19 pagesMedium Voltage Electrical System ReBet KèoNo ratings yet
- Lesson Learned From Power System Design With Powerworld SimulatorDocument7 pagesLesson Learned From Power System Design With Powerworld SimulatorAhosan HabibNo ratings yet
- Low Cost Microcontroller Based Implementation of Modulation Techniques For Three-Phase Inverter ApplicationsDocument7 pagesLow Cost Microcontroller Based Implementation of Modulation Techniques For Three-Phase Inverter ApplicationsAijaz AhmedNo ratings yet
- PWM Based Passive Power Factor CorrectionDocument4 pagesPWM Based Passive Power Factor CorrectionijaertNo ratings yet
- Article Biloa FinalDocument12 pagesArticle Biloa FinalBILOANo ratings yet
- PSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLDocument9 pagesPSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLKurniawan Indra LeksanaNo ratings yet
- A High-Performance Generalized Discontinuous PWM Algorithm: Ahmet M. Hava,, Russel J. Kerkman,, and Thomas A. LipoDocument13 pagesA High-Performance Generalized Discontinuous PWM Algorithm: Ahmet M. Hava,, Russel J. Kerkman,, and Thomas A. LipoSherif M. DabourNo ratings yet
- ONSemi-Developing A 25-kW SiC-Based Fast DC Charger Solution Overview3Document27 pagesONSemi-Developing A 25-kW SiC-Based Fast DC Charger Solution Overview3133514No ratings yet
- Development of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatorDocument6 pagesDevelopment of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatortabendaaarzuNo ratings yet
- PWM ThesisDocument4 pagesPWM ThesisPaySomeoneToWriteMyPaperGilbert100% (1)
- documentDocument6 pagesdocumentnikhilrathod704No ratings yet
- Power Quality Improvementin Low Voltage Transmission SystemDocument15 pagesPower Quality Improvementin Low Voltage Transmission SystemDungNo ratings yet
- CorreccionFP-InVE MEM 2009 64706Document6 pagesCorreccionFP-InVE MEM 2009 64706solbahiaNo ratings yet
- Design_and_Implementation_of_Switched_Capacitor_BaDocument15 pagesDesign_and_Implementation_of_Switched_Capacitor_BaDEEPAK PRAJAPATINo ratings yet
- 10 1109@pedstc 2017 7910356 PDFDocument6 pages10 1109@pedstc 2017 7910356 PDFAngamuthu AnanthNo ratings yet
- Complex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersDocument15 pagesComplex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersMaikPortnoyNo ratings yet
- Active Front-End Rectifier Modelling Using Dynamic Phasors for More-Electric Aircraft Applications_IET_V5Document24 pagesActive Front-End Rectifier Modelling Using Dynamic Phasors for More-Electric Aircraft Applications_IET_V5Nuradin JemalNo ratings yet
- Design and Evaluation of PWM Control Circuits For DC AC Converters Using PSPICEDocument3 pagesDesign and Evaluation of PWM Control Circuits For DC AC Converters Using PSPICEPeter PoorNo ratings yet
- Modelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityDocument23 pagesModelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityAnonymous zzMfpoBxNo ratings yet
- Design and Execution of A DC Source With High Power and High EfficiencyDocument19 pagesDesign and Execution of A DC Source With High Power and High EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 31-Definitions and Applications of Dynamic Average Models For Analysis of Power SystemsDocument15 pages31-Definitions and Applications of Dynamic Average Models For Analysis of Power SystemsZyad GhaziNo ratings yet
- Fulltext01 PDFDocument66 pagesFulltext01 PDFElenildo Oliveira da SilvaNo ratings yet
- Dlsta LIC: STI N A SIMDocument11 pagesDlsta LIC: STI N A SIMJohari Zhou Hao LiNo ratings yet
- Processor in The Loop Test For Algorithms Designed To Control Power Electronics Converters Used in Grid Connected Photovoltaic SystemDocument19 pagesProcessor in The Loop Test For Algorithms Designed To Control Power Electronics Converters Used in Grid Connected Photovoltaic SystemDjamila RekiouaNo ratings yet
- Journal Pre-Proof: Microprocessors and MicrosystemsDocument19 pagesJournal Pre-Proof: Microprocessors and MicrosystemsGOBINATH KNo ratings yet
- State-of-the-Art Carrier PWM Techniques Critical EvaluationDocument10 pagesState-of-the-Art Carrier PWM Techniques Critical EvaluationMilton SepúlvedaNo ratings yet
- Modeling and Simulation of 6-Pulse Rectifier Drives With PDFDocument6 pagesModeling and Simulation of 6-Pulse Rectifier Drives With PDFSunil KumarNo ratings yet
- A Texas Instruments DSP-based Acoustic Source Direction FinderDocument5 pagesA Texas Instruments DSP-based Acoustic Source Direction Finderimrankhan1995No ratings yet
- Smart Grid Research Kit ManualDocument78 pagesSmart Grid Research Kit Manualimrankhan1995No ratings yet
- Energies 10 00907Document25 pagesEnergies 10 00907imrankhan1995No ratings yet
- Tms320F2833X, Tms320F2823X Digital Signal Controllers (DSCS)Document208 pagesTms320F2833X, Tms320F2823X Digital Signal Controllers (DSCS)krishnaNo ratings yet
- Ee 653Document4 pagesEe 653imrankhan1995No ratings yet
- Philips+TPM9 5A+LADocument106 pagesPhilips+TPM9 5A+LANishsanka MunasinghaNo ratings yet
- MVSG ManualDocument61 pagesMVSG Manualيوسف خضر النسورNo ratings yet
- Zaph Audio SB12Document5 pagesZaph Audio SB12RINJUNo ratings yet
- WYO Ceramic AC Capacitors Class X1, 440V / Class Y2, 250V: Vishay DraloricDocument2 pagesWYO Ceramic AC Capacitors Class X1, 440V / Class Y2, 250V: Vishay DraloricАндрей ПоляковNo ratings yet
- IPC-S-816 SMT Process Guideline ChecklistDocument4 pagesIPC-S-816 SMT Process Guideline Checklistmigant23uNo ratings yet
- Siemens GCB HB3-C Flyer-1Document2 pagesSiemens GCB HB3-C Flyer-1Hassan_haNo ratings yet
- GPS Multiple Output D.C. Power Supply Performance Verification and Adjustment ManualDocument46 pagesGPS Multiple Output D.C. Power Supply Performance Verification and Adjustment ManualPetr -No ratings yet
- ME6118 MicroneDocument12 pagesME6118 MicroneinfosolutionNo ratings yet
- Testo 176 T1 T2Document4 pagesTesto 176 T1 T2Wert IndiaNo ratings yet
- Servo Valve OperationDocument16 pagesServo Valve OperationBhagat ShardanandNo ratings yet
- Embedded Systems Assignment 2Document4 pagesEmbedded Systems Assignment 2ArvindNo ratings yet
- Cut Sheet Binder Rev 4Document175 pagesCut Sheet Binder Rev 4nasierrasNo ratings yet
- Polymer MemoryDocument26 pagesPolymer MemoryVidyasagar KatariNo ratings yet
- L 324 NDocument4 pagesL 324 Njulio.upe9317No ratings yet
- ENE KB9022 On LA-A342P ZIPS3Document15 pagesENE KB9022 On LA-A342P ZIPS3Hassan FakhouryNo ratings yet
- Acbel Polytech IncDocument22 pagesAcbel Polytech IncFirdaus BambooNo ratings yet
- Guia de InstalacionDocument97 pagesGuia de InstalacionSamit JorgeNo ratings yet
- Acoustic Emission Monitoring During Resistance Spot-WeldingDocument6 pagesAcoustic Emission Monitoring During Resistance Spot-WeldingROHITNo ratings yet
- Samsung Mobile LCD Price List (210401) TruemaxDocument30 pagesSamsung Mobile LCD Price List (210401) TruemaxRonald Vitor RuizNo ratings yet
- S1 Not (A Xor B) S2 Not D or (C and D) S S2 and (E Xor S1)Document11 pagesS1 Not (A Xor B) S2 Not D or (C and D) S S2 and (E Xor S1)oussama elkaissiNo ratings yet
- 4 Electromagnetism: Practice 4.1 (p.166)Document12 pages4 Electromagnetism: Practice 4.1 (p.166)Natalie ShumNo ratings yet
- Electronic SystemsDocument4 pagesElectronic SystemsKram YnarNo ratings yet
- Best IU 2007Document70 pagesBest IU 2007Naho Senay IINo ratings yet
- Industrial BatteryDocument22 pagesIndustrial BatteryAndrey LuqueNo ratings yet
- TV Led & LCD Terbaik Hanya Sharp Aquos - Lc-32le348iDocument2 pagesTV Led & LCD Terbaik Hanya Sharp Aquos - Lc-32le348iSukawan ZakyNo ratings yet
- SDC 7500Document10 pagesSDC 7500Rubén Mario AcostaNo ratings yet
- It600 VS10W VS10B Installer User Manual 022 NCDocument76 pagesIt600 VS10W VS10B Installer User Manual 022 NCIonut GrecuNo ratings yet
- L807 WCH Series Wind Cone RigidDocument3 pagesL807 WCH Series Wind Cone Rigidcristian camilo enciso parraNo ratings yet
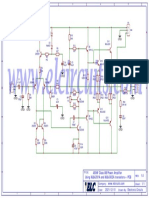
- Using MJL4281A and MJL4302A Transistors + PCB 400W Class AB Power AmplifierDocument1 pageUsing MJL4281A and MJL4302A Transistors + PCB 400W Class AB Power Amplifierasep ridwanNo ratings yet
- Design and Verification of Slave Block in Ethernet Management Interface Using UVMDocument7 pagesDesign and Verification of Slave Block in Ethernet Management Interface Using UVMkesavaram447No ratings yet
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet