You might also like
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Innovations and Proven Equipment at The Iaf 2013Document7 pagesInnovations and Proven Equipment at The Iaf 2013Gandhie RuzendyNo ratings yet
- Total LiftingDocument7 pagesTotal LiftingAhmedNo ratings yet
- RT34 Crawler Tractor DozerDocument5 pagesRT34 Crawler Tractor DozerDawn GavinNo ratings yet
- Rollover Protective Structures (ROPS)Document3 pagesRollover Protective Structures (ROPS)hazopmanNo ratings yet
- Recommended Practice For Machinery Installation and Installation Design Chapter 2-Rigging and LiftingDocument2 pagesRecommended Practice For Machinery Installation and Installation Design Chapter 2-Rigging and LiftingshbaeerNo ratings yet
- PF Series Gantry Manual With Assembly DrawingsDocument26 pagesPF Series Gantry Manual With Assembly DrawingsSophia PoBari-Soter (MenaXrux)No ratings yet
- RT09 Forward Tipping DumperDocument5 pagesRT09 Forward Tipping DumperDuncanNo ratings yet
- MultitelDocument27 pagesMultitelŽeljko60% (5)
- She002 Rams Issue 6.0Document8 pagesShe002 Rams Issue 6.0kormorakNo ratings yet
- Piling Rigs Overturning On Construction Sites: A Guide To Loss PreventionDocument4 pagesPiling Rigs Overturning On Construction Sites: A Guide To Loss Preventionmohd addinNo ratings yet
- 4.13 Tyre - Wheel ChangingDocument4 pages4.13 Tyre - Wheel Changingjohnson OlubiNo ratings yet
- Hsbei 1412Document2 pagesHsbei 1412Heru WibowoNo ratings yet
- RT60 Mobile CraneDocument6 pagesRT60 Mobile CraneNithin DevNo ratings yet
- Setting Up of Mobile CranesDocument14 pagesSetting Up of Mobile CranesdanbndNo ratings yet
- RMS0021A - Safety Berms StandardDocument4 pagesRMS0021A - Safety Berms StandardFriederich MarcossyNo ratings yet
- Safe Use of MewpsDocument10 pagesSafe Use of MewpsObodoruku StanleyNo ratings yet
- Camera Dollies and Crane SafetyDocument2 pagesCamera Dollies and Crane SafetyflorelmagNo ratings yet
- Working Principle of BCM, DTS, UNIMATDocument97 pagesWorking Principle of BCM, DTS, UNIMATshuja2008No ratings yet
- PAES - CompilationDocument245 pagesPAES - CompilationfundalaytNo ratings yet
- Presentation For EngineersDocument116 pagesPresentation For EngineersChalana UshanNo ratings yet
- Excavator OperationDocument6 pagesExcavator OperationRussellNo ratings yet
- Alkami Air Inlet Elbow Lifting PlanDocument16 pagesAlkami Air Inlet Elbow Lifting PlanVuthpalachaitanya KrishnaNo ratings yet
- Manual de Operaçao GTHZ - InglesDocument80 pagesManual de Operaçao GTHZ - InglesMirellyNo ratings yet
- Adnoc 222 ASOG-CAMO 050223 REV. 01Document16 pagesAdnoc 222 ASOG-CAMO 050223 REV. 01Фирса АNo ratings yet
- CICA CraneSafetyBulletin287GroundPressureDocument1 pageCICA CraneSafetyBulletin287GroundPressureEphraim BarezNo ratings yet
- Memory Slim CBLT PDFDocument4 pagesMemory Slim CBLT PDFMichell ben ManikNo ratings yet
- Load Charts TMS750B: 85% StabilityDocument18 pagesLoad Charts TMS750B: 85% StabilityDarío Ache EmeNo ratings yet
- Manual International 9125ADocument166 pagesManual International 9125AJulioCRX0% (1)
- Lifting PlanDocument66 pagesLifting Planklibi100% (6)
- Manual de Partes RT-160Document622 pagesManual de Partes RT-160leogerguzNo ratings yet
- Brochure GM IM Horizontal Scourer MHXS EN 2018Document4 pagesBrochure GM IM Horizontal Scourer MHXS EN 2018gernogueraNo ratings yet
- SRC400C Load Charts ManualDocument20 pagesSRC400C Load Charts ManualLautaroNo ratings yet
- Safe Work Practice Dozer OperatorsDocument4 pagesSafe Work Practice Dozer OperatorsMuhammad Ashraf AhmadNo ratings yet
- Grove Rt530e-2 Load ChartDocument16 pagesGrove Rt530e-2 Load Chartburak cikirkanNo ratings yet
- Load Chart GRT 880 - 236006-1Document18 pagesLoad Chart GRT 880 - 236006-1mohamedNo ratings yet
- SOP No.17 - Rotary Percussive BoreholesDocument6 pagesSOP No.17 - Rotary Percussive Boreholessiame festusNo ratings yet
- Method Statement For Man BasketDocument14 pagesMethod Statement For Man BasketRaju83% (6)
- Crane Truck ManualDocument19 pagesCrane Truck ManualepsaNo ratings yet
- Safety AlertDocument2 pagesSafety Alertjo123nNo ratings yet
- Taiko Three-Rotor Screw PumpsDocument20 pagesTaiko Three-Rotor Screw PumpsYaman YalçınNo ratings yet
- 012 Piling WorkDocument17 pages012 Piling WorkFara Atika Bha Ney100% (3)
- TB 9 2330 381 14 1Document108 pagesTB 9 2330 381 14 1pavannnNo ratings yet
- TB 9 2330 381 14 1Document107 pagesTB 9 2330 381 14 1Advocate100% (1)
- Aluminium Towers ManualDocument70 pagesAluminium Towers ManualWennie Ann DomondonNo ratings yet
- Grove Rt640 LCDocument17 pagesGrove Rt640 LCCésar Augusto Quiroga MontenegroNo ratings yet
- Earthmoving Equipment Used As A CraneDocument3 pagesEarthmoving Equipment Used As A CraneImran Alam100% (1)
- RT760E Load ChartDocument19 pagesRT760E Load Chartcz7ykktc5bNo ratings yet
- Load Chart Grove RT500DXL / RT530DXLDocument16 pagesLoad Chart Grove RT500DXL / RT530DXLVictor FabrisNo ratings yet
- MS For Cold in Situ Pavement Recycling (CIPR)Document11 pagesMS For Cold in Situ Pavement Recycling (CIPR)Zulaika LainiNo ratings yet
- 0 GTC-400EX LOAD CHART, With 4m Track Position, ISO, 3B6 PDFDocument41 pages0 GTC-400EX LOAD CHART, With 4m Track Position, ISO, 3B6 PDFRobertNo ratings yet
- Grua 22Document19 pagesGrua 22Alberto QuispeNo ratings yet
- Em 385 MCWP ExtractDocument3 pagesEm 385 MCWP ExtractKevin OSheaNo ratings yet
- Bltn149 - Multiple Crane LiftsDocument2 pagesBltn149 - Multiple Crane LiftsLaughlikesiao HeheNo ratings yet
- Different Drilling-Piling Rig Uses and Specific IssuesDocument3 pagesDifferent Drilling-Piling Rig Uses and Specific IssuesAivarasNo ratings yet
- Disc Plow BalidDocument37 pagesDisc Plow BalidRod Jhon EboNo ratings yet
- Safe Use of CranesDocument33 pagesSafe Use of Craneswasim Akram100% (1)
- R F (H W C) :: Operations & Screening CrushingDocument7 pagesR F (H W C) :: Operations & Screening Crushingkmohamedkeita906No ratings yet
- Load Charts RT890E: Serial NumberDocument22 pagesLoad Charts RT890E: Serial NumberFranck SPERZAGNI PUBNo ratings yet
- 7.1. FM Listing Approval of Amipox 2016Document8 pages7.1. FM Listing Approval of Amipox 2016minov minovitchNo ratings yet
- Sub-Base Fuel Tank Standard FeaturesDocument1 pageSub-Base Fuel Tank Standard Featuresminov minovitchNo ratings yet
- 2B.ESIA Non-Technical SummaryDocument35 pages2B.ESIA Non-Technical Summaryminov minovitchNo ratings yet
- ISO Tanks: Product DatasheetDocument2 pagesISO Tanks: Product Datasheetminov minovitchNo ratings yet
- F921 Lube Tank: Standard FeaturesDocument1 pageF921 Lube Tank: Standard Featuresminov minovitchNo ratings yet
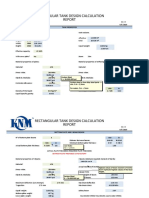
- Rectangular Tank Design Calculation: Tank Properties Tank Dimensions: Tank Volume: MM inDocument11 pagesRectangular Tank Design Calculation: Tank Properties Tank Dimensions: Tank Volume: MM inminov minovitchNo ratings yet
- 04-02 - AVK - SS 316 Rod - Extension - Spindle - Fixed - Gate - ValveDocument2 pages04-02 - AVK - SS 316 Rod - Extension - Spindle - Fixed - Gate - Valveminov minovitchNo ratings yet
- 1710 Abeco Spec SheetDocument4 pages1710 Abeco Spec Sheetminov minovitchNo ratings yet
- Design of Water Tank On The Ground According To Bs 8007:1987Document109 pagesDesign of Water Tank On The Ground According To Bs 8007:1987minov minovitchNo ratings yet
- The World'S First Bank For The Business of Water: Trusted For Over 35 Years To Protect Against Water ScarcityDocument7 pagesThe World'S First Bank For The Business of Water: Trusted For Over 35 Years To Protect Against Water Scarcityminov minovitchNo ratings yet
- 1389 Abeco Company-Profile Print ReadyDocument8 pages1389 Abeco Company-Profile Print Readyminov minovitchNo ratings yet
- F921 Storage Tanks: Standard FeaturesDocument2 pagesF921 Storage Tanks: Standard Featuresminov minovitchNo ratings yet
- FLAMESHIELDDocument2 pagesFLAMESHIELDminov minovitchNo ratings yet
- Res xSteepSlopeLoggingDocument29 pagesRes xSteepSlopeLoggingminov minovitchNo ratings yet
- Safe Work Procedures For On-Ground Projects: 1. Terms Used in This DocumentDocument2 pagesSafe Work Procedures For On-Ground Projects: 1. Terms Used in This Documentminov minovitchNo ratings yet
- Construction OS&H Horizontal MovementDocument51 pagesConstruction OS&H Horizontal Movementminov minovitchNo ratings yet
- Water: Slip Factor Correction in 1-D Performance Prediction Model For PatsDocument23 pagesWater: Slip Factor Correction in 1-D Performance Prediction Model For Patsminov minovitchNo ratings yet
- Rapport de Stage Technicien - FiDocument73 pagesRapport de Stage Technicien - Fiminov minovitch100% (1)
- Environmental Pit Box GBMY5050M2 SeriesDocument2 pagesEnvironmental Pit Box GBMY5050M2 Seriesminov minovitchNo ratings yet
- Ap303 - Cooling Water PumpsDocument4 pagesAp303 - Cooling Water Pumpsminov minovitchNo ratings yet
- Aviation Fuel Hydrant Pit BoxDocument2 pagesAviation Fuel Hydrant Pit Boxminov minovitchNo ratings yet
- WMFTG Corporate Presentation AUG 2020Document23 pagesWMFTG Corporate Presentation AUG 2020minov minovitchNo ratings yet
- 355GF Data Sheet US - MetricDocument2 pages355GF Data Sheet US - Metricminov minovitchNo ratings yet
- Aviation Ground Fuelling Solutions: WL-4354-01-AM (XXX), WL-5225-01-AM (XXX)Document4 pagesAviation Ground Fuelling Solutions: WL-4354-01-AM (XXX), WL-5225-01-AM (XXX)minov minovitchNo ratings yet
- Loadstar Shipping vs. Pioneer AsiaDocument7 pagesLoadstar Shipping vs. Pioneer AsiaKrisleen AbrenicaNo ratings yet
- Quizzer in Corpo Set ADocument10 pagesQuizzer in Corpo Set ACJBNo ratings yet
- EDII, Chennai-Revised Mentors List PDFDocument6 pagesEDII, Chennai-Revised Mentors List PDFVanita ValluvanNo ratings yet
- Project Execution Plan Robinsons Bulacan Town Center Archipelago BuildersDocument27 pagesProject Execution Plan Robinsons Bulacan Town Center Archipelago BuildersMariel ColladoNo ratings yet
- Commerce: Pearson Edexcel International GCSEDocument16 pagesCommerce: Pearson Edexcel International GCSEAbdul Kader OniNo ratings yet
- Aws Security Best PracticesDocument7 pagesAws Security Best PracticesSantiago MuñozNo ratings yet
- Branding and Packaging Decisions of The ProductDocument34 pagesBranding and Packaging Decisions of The ProductPraveen Prasoon100% (1)
- Fund Flow StatementDocument11 pagesFund Flow StatementSANTHIYA KNo ratings yet
- Exporting HeadphoneDocument5 pagesExporting HeadphoneNguyễn Huyền100% (1)
- J17 DipIFR - AnswersDocument8 pagesJ17 DipIFR - Answers刘宝英No ratings yet
- TBChap 009Document115 pagesTBChap 009alaamabood6No ratings yet
- Automobile Literature ReviewDocument8 pagesAutomobile Literature Reviewbzknsgvkg100% (1)
- PI-9003520-Mitali Fashions Limited - Self-SGS CTPAT-Announced-Iinitial-AC Fty.Document1 pagePI-9003520-Mitali Fashions Limited - Self-SGS CTPAT-Announced-Iinitial-AC Fty.Faruque UddinNo ratings yet
- FMD Unit 4&6Document11 pagesFMD Unit 4&6Vishesh GuptaNo ratings yet
- AppDirect Cloud Services CatalogDocument43 pagesAppDirect Cloud Services CatalogProfessor PrabhatNo ratings yet
- AirAsia Group Berhad - AR2020 - Part 4Document212 pagesAirAsia Group Berhad - AR2020 - Part 4NUR RAHIMIE FAHMI B.NOOR ADZMAN NUR RAHIMIE FAHMI B.NOOR ADZMANNo ratings yet
- Jardin Vs NLRCDocument2 pagesJardin Vs NLRCEarvin Joseph BaraceNo ratings yet
- Business Accounting Quiz 2 (Answers) Updated.Document7 pagesBusiness Accounting Quiz 2 (Answers) Updated.Hareen JuniorNo ratings yet
- Bord Gáis Energy Gas & Electricity Supplier IrelandDocument1 pageBord Gáis Energy Gas & Electricity Supplier IrelandRomerson AmbrósioNo ratings yet
- TA Employee Referral ProgamDocument3 pagesTA Employee Referral ProgamagalaboNo ratings yet
- MPM344 TemplateDocument15 pagesMPM344 TemplateGeorge MainaNo ratings yet
- Challenges and Problems of Jasmine Cultivators in Udupi District A Case StudyDocument5 pagesChallenges and Problems of Jasmine Cultivators in Udupi District A Case StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Statement 1579810252745Document5 pagesStatement 1579810252745SWEET KINGNo ratings yet
- Kathy Harris A Maturity Model For InnovationDocument13 pagesKathy Harris A Maturity Model For InnovationUndecidedOne100% (1)
- DNV ST E271 Offshore ContainersDocument107 pagesDNV ST E271 Offshore ContainersWantana RattaneeNo ratings yet
- Mini Project-2Document44 pagesMini Project-2ÇHäÎťÂñŸà MùŚïČÂłŚNo ratings yet
- Union Registration: Procedure 1. RequirementsDocument7 pagesUnion Registration: Procedure 1. RequirementsErika WijangcoNo ratings yet
- Worksheet 5.1 Worksheet 5.4: Tuesday MondayDocument2 pagesWorksheet 5.1 Worksheet 5.4: Tuesday MondayNazir RashidNo ratings yet
- Law - MC CorporationDocument26 pagesLaw - MC CorporationJelly Ann AndresNo ratings yet
- Explore Innovate DisruptDocument5 pagesExplore Innovate DisruptVaishnaviRaviNo ratings yet