You might also like
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Shape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationFrom EverandShape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationNo ratings yet
- Control Study On The CVT Metal V-Belt's Axial-Misalignment of CarDocument5 pagesControl Study On The CVT Metal V-Belt's Axial-Misalignment of CarLalit PatilNo ratings yet
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocument5 pagesDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilNo ratings yet
- Contact Stress Analysis For A Pair of Mating GearsDocument10 pagesContact Stress Analysis For A Pair of Mating Gearsvickytechie03No ratings yet
- Top Tower Insulator String SwingDocument5 pagesTop Tower Insulator String SwingvgcasasNo ratings yet
- Design and Analysis Trends of Helicopter Rotor SystemsDocument40 pagesDesign and Analysis Trends of Helicopter Rotor SystemsHasan ÖzgenNo ratings yet
- Simulation of Rail-Wheel Contact ForceDocument14 pagesSimulation of Rail-Wheel Contact Forcepouyarostam100% (1)
- 39 MeisingerDocument11 pages39 MeisingerBaru SomisettyNo ratings yet
- Influence of Pulley Kinematics On Cable-Driven Parallel RobotsDocument8 pagesInfluence of Pulley Kinematics On Cable-Driven Parallel Robotschaiwei032No ratings yet
- zeng-et-al-2017-optimization-of-the-target-profile-for-asymmetrical-rail-grinding-in-sharp-radius-curves-for-high-speedDocument12 pageszeng-et-al-2017-optimization-of-the-target-profile-for-asymmetrical-rail-grinding-in-sharp-radius-curves-for-high-speedadriana GreguerNo ratings yet
- Analysis of The Power Transmission Characteristics of A Metal V-Belt Type CVTDocument8 pagesAnalysis of The Power Transmission Characteristics of A Metal V-Belt Type CVTReza FbriadiNo ratings yet
- U N I T 8 B e L T, C H A I N, G e A R S A N D L A W o F G e A R I N G 8 - 1 I N T R o D U C T I o NDocument42 pagesU N I T 8 B e L T, C H A I N, G e A R S A N D L A W o F G e A R I N G 8 - 1 I N T R o D U C T I o Namit_kushwah1No ratings yet
- Symposium On The Lift and Escalator TechnologiesDocument4 pagesSymposium On The Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Modeling and Control of Hybrid Stepping MotorsDocument6 pagesModeling and Control of Hybrid Stepping MotorsMeriam BadriNo ratings yet
- Metals 10 00513 v2Document9 pagesMetals 10 00513 v2Pedro JuarezNo ratings yet
- Power Transmission Devices ExplainedDocument31 pagesPower Transmission Devices ExplainedrajdrklNo ratings yet
- Block Diagram Model of Lathe MachineDocument6 pagesBlock Diagram Model of Lathe MachineLamis EssamNo ratings yet
- Method of Geometric Calculation of Involute Helical Gear Drives, Modified in Two DirectionsDocument9 pagesMethod of Geometric Calculation of Involute Helical Gear Drives, Modified in Two DirectionsSwarnava PaulNo ratings yet
- Design and Dynamic Analysis of An Axially-Laminated Self-Starting Synchronous Reluctance MotorDocument6 pagesDesign and Dynamic Analysis of An Axially-Laminated Self-Starting Synchronous Reluctance MotorSherif M. DabourNo ratings yet
- Dynamic Analysis of Gear and Rack Transmission SysDocument6 pagesDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNo ratings yet
- K Factors of Framed Columns Restrained by Tapered Girders in US Codes 1993Document10 pagesK Factors of Framed Columns Restrained by Tapered Girders in US Codes 1993ciscoNo ratings yet
- Generation of Crowned Parabolic Novikov GearsDocument5 pagesGeneration of Crowned Parabolic Novikov GearsfgsldfjglkjsdfNo ratings yet
- Hrones and Nelson AtlasDocument743 pagesHrones and Nelson AtlasJuan Pablo Pineda67% (3)
- Variable Motion Toothed Gear GeometryDocument3 pagesVariable Motion Toothed Gear GeometryradoevNo ratings yet
- Analyzing Dynamic Responses of Vehicle-Track Systems with Random Track IrregularitiesDocument19 pagesAnalyzing Dynamic Responses of Vehicle-Track Systems with Random Track IrregularitiesHemanth C KNo ratings yet
- Shaft Misalignment and Vibration - A ModelDocument13 pagesShaft Misalignment and Vibration - A ModelPeak NeoNo ratings yet
- Analysis of The Fatigue Performance of Elastic Rail ClipDocument10 pagesAnalysis of The Fatigue Performance of Elastic Rail ClipsaltbathNo ratings yet
- 547 002 PDFDocument19 pages547 002 PDFLikhon BiswasNo ratings yet
- Curved I-Girder Design: Esign TheDocument19 pagesCurved I-Girder Design: Esign TheLikhon BiswasNo ratings yet
- Seismic Analysis of ViaductDocument11 pagesSeismic Analysis of ViaductRim JhimNo ratings yet
- Characteristic Analysis of A Permanent Magnet Transverse Flux Linear Motor With Spiral CoreDocument6 pagesCharacteristic Analysis of A Permanent Magnet Transverse Flux Linear Motor With Spiral CoreKi ChunNo ratings yet
- The Synthesis of Elliptical Gears Generated by Shaper-CuttersDocument9 pagesThe Synthesis of Elliptical Gears Generated by Shaper-CuttersBen TearleNo ratings yet
- Vibration ProjectDocument11 pagesVibration ProjectEileen WongNo ratings yet
- (J. García-Prada) Methodology To Characterize The Von Misses Stress in The Contact Between Wheel and Rail (Test-Rig)Document5 pages(J. García-Prada) Methodology To Characterize The Von Misses Stress in The Contact Between Wheel and Rail (Test-Rig)luigi12244No ratings yet
- E 2 Sin (PN + N), M 2pfo Appn YDocument3 pagesE 2 Sin (PN + N), M 2pfo Appn YDeepak SharmaNo ratings yet
- Axial Position and Speed Vector Control of The Inset PermanentDocument6 pagesAxial Position and Speed Vector Control of The Inset PermanentLê Đức ThịnhNo ratings yet
- Finite Element Analysis of Natural Whirl Speeds of Rotating ShaftsDocument7 pagesFinite Element Analysis of Natural Whirl Speeds of Rotating ShaftsmanojNo ratings yet
- Vibration Transmission Through Rolling Element Bearings, Part I Bearing StiffnessDocument21 pagesVibration Transmission Through Rolling Element Bearings, Part I Bearing StiffnessApoorvaNo ratings yet
- Accelerating Through Resonance of A Universal Joint Drive LineDocument9 pagesAccelerating Through Resonance of A Universal Joint Drive LinePrasadNo ratings yet
- Modeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberDocument5 pagesModeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberMeena RamNo ratings yet
- Analysis of Cylindrical Cam Molded Surface EquationsDocument3 pagesAnalysis of Cylindrical Cam Molded Surface EquationsHansNo ratings yet
- Dynamic Modeling and Optimal Control of Cone-Shaped Active Magnetic Bearing SystemsDocument11 pagesDynamic Modeling and Optimal Control of Cone-Shaped Active Magnetic Bearing SystemsVu MinhNo ratings yet
- Ductility and Hysteresis Models of Steel Columns and Frame PiersDocument6 pagesDuctility and Hysteresis Models of Steel Columns and Frame PiersJeno MscNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute GearingDocument6 pagesCycloid Drive - Replaced by Planocentric Involute GearingMax GrandeNo ratings yet
- VECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSDocument6 pagesVECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSThinseepNo ratings yet
- Setting Out of Transition CurvesDocument13 pagesSetting Out of Transition CurvesapurvajahagirdarNo ratings yet
- Ac 2008-1325: Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2DDocument13 pagesAc 2008-1325: Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2DRobin MachargNo ratings yet
- Vagati1997 - Design of Low-Torque-Ripple Synchronous Reluctance MotorsDocument8 pagesVagati1997 - Design of Low-Torque-Ripple Synchronous Reluctance MotorsCasualKillaNo ratings yet
- Pergamon: Design For Manufacturing The Elastic Pivots With Special Reference To Manufacturing ErrorDocument16 pagesPergamon: Design For Manufacturing The Elastic Pivots With Special Reference To Manufacturing ErrorCrystal KingNo ratings yet
- Chap-8 Gear TrainDocument18 pagesChap-8 Gear TrainAlysNo ratings yet
- 9A03401 Kinematics of MachineryDocument8 pages9A03401 Kinematics of MachinerysivabharathamurthyNo ratings yet
- Cone CVTDocument4 pagesCone CVTArun KumarNo ratings yet
- Novel Study of The Rail's Geometry in The Electromagnetic LauncherDocument5 pagesNovel Study of The Rail's Geometry in The Electromagnetic LauncherSaravana Kumar M NNo ratings yet
- Study On The Curve Shape of C-Shaped Armature's Trailing Arms in Rectangular Bore RailgunDocument7 pagesStudy On The Curve Shape of C-Shaped Armature's Trailing Arms in Rectangular Bore RailgunSaravana Kumar M NNo ratings yet
- Selection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceDocument15 pagesSelection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceIAES International Journal of Robotics and AutomationNo ratings yet
- Design and Optimization of Single Phase Tubular Switched ReluctanceDocument6 pagesDesign and Optimization of Single Phase Tubular Switched ReluctanceEmrah KapukayaNo ratings yet
- Torsion of Crankshafts: Imoshenko Hiladelphia ADocument15 pagesTorsion of Crankshafts: Imoshenko Hiladelphia ALahiru Prabhatha AmarasenaNo ratings yet
- Kinematic Analysis of Mechanism For Converting Rotational Motion Into Reciprocating Rotational MotionDocument6 pagesKinematic Analysis of Mechanism For Converting Rotational Motion Into Reciprocating Rotational MotionRockerss RockerssNo ratings yet
- Identification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentDocument12 pagesIdentification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentSivaRSNo ratings yet
- Investigation On Automation of Lathe Machine: ArticleDocument7 pagesInvestigation On Automation of Lathe Machine: ArticlePrashant RajoleNo ratings yet
- Payment of Rs. 6938 successful - Tikona service billDocument1 pagePayment of Rs. 6938 successful - Tikona service billshardul dhakareNo ratings yet
- HP mt41 Mobile Thin Client: Maintenance and Service GuideDocument109 pagesHP mt41 Mobile Thin Client: Maintenance and Service GuideLalit PatilNo ratings yet
- Irjet V3i692 PDFDocument3 pagesIrjet V3i692 PDFParshotam SharmaNo ratings yet
- Investigation On Automation of Lathe Machine: ArticleDocument7 pagesInvestigation On Automation of Lathe Machine: ArticlePrashant RajoleNo ratings yet
- Kang 2018Document9 pagesKang 2018Lalit PatilNo ratings yet
- Research On Cutting Quantity Optimization Based On CNC LatheDocument4 pagesResearch On Cutting Quantity Optimization Based On CNC LatheLalit PatilNo ratings yet
- College of Engineering College of EngineeringDocument21 pagesCollege of Engineering College of EngineeringLalit PatilNo ratings yet
- Agile E1 v1.1Document5 pagesAgile E1 v1.1Kiran71% (17)
- Kotak Group Accident Protect InsuranceDocument12 pagesKotak Group Accident Protect InsuranceLalit PatilNo ratings yet
- Agile Key With Answers-ConsolidatedDocument12 pagesAgile Key With Answers-ConsolidatedKasetti Lahari70% (402)
- ouchureIC 7000Document4 pagesouchureIC 7000iti_na8567No ratings yet
- The Reading Process PDFDocument1 pageThe Reading Process PDFAdy OliveiraNo ratings yet
- Getting Started With Microsoft ExcelDocument12 pagesGetting Started With Microsoft ExcelRoshan AdhikariNo ratings yet
- Speed Control Methods of 3-Phase Induction MotorsDocument3 pagesSpeed Control Methods of 3-Phase Induction MotorsBenzene diazonium saltNo ratings yet
- Mobilization and Participation: Social-Psychological Expansisons of Resource Mobilization TheoryDocument19 pagesMobilization and Participation: Social-Psychological Expansisons of Resource Mobilization TheoryJoaquim OliveiraNo ratings yet
- Node - Js 8 The Right Way: Extracted FromDocument11 pagesNode - Js 8 The Right Way: Extracted FromRodrigo Románovich FiodorovichNo ratings yet
- Blood Smear PreparationDocument125 pagesBlood Smear PreparationKim RuizNo ratings yet
- Practical Training Seminar Report FormatDocument8 pagesPractical Training Seminar Report FormatShrijeet PugaliaNo ratings yet
- Oven Nordson ElectronicDocument60 pagesOven Nordson ElectronicDanijela KoNo ratings yet
- 07 FSM PDFDocument25 pages07 FSM PDFnew2trackNo ratings yet
- Test Bank For Close Relations An Introduction To The Sociology of Families 4th Canadian Edition McdanielDocument36 pagesTest Bank For Close Relations An Introduction To The Sociology of Families 4th Canadian Edition Mcdanieldakpersist.k6pcw4100% (44)
- EPFO Declaration FormDocument4 pagesEPFO Declaration FormSiddharth PednekarNo ratings yet
- Lesson 4 - Nature of The Speech Communication ProcessDocument4 pagesLesson 4 - Nature of The Speech Communication ProcessDon Miguel SpokesNo ratings yet
- Identifying The Orders of AR and MA Terms in An ARIMA ModelDocument11 pagesIdentifying The Orders of AR and MA Terms in An ARIMA ModelNeha GillNo ratings yet
- DLP 6 LO2 Safe Disposal of Tools and MaterialsDocument13 pagesDLP 6 LO2 Safe Disposal of Tools and MaterialsReybeth Tahud Hamili - Matus100% (2)
- BrochureDocument2 pagesBrochureNarayanaNo ratings yet
- Vidya Mandir Public School Class 11 Computer Science String Assignment SolutionsDocument5 pagesVidya Mandir Public School Class 11 Computer Science String Assignment SolutionsArun SharmaNo ratings yet
- MR Explorer: Magnetic Resonance Logging ServiceDocument7 pagesMR Explorer: Magnetic Resonance Logging ServiceRoberto DominguezNo ratings yet
- Uop Teuop-Tech-And-More-Air-Separation-Adsorbents-Articlech and More Air Separation Adsorbents ArticleDocument8 pagesUop Teuop-Tech-And-More-Air-Separation-Adsorbents-Articlech and More Air Separation Adsorbents ArticleRoo FaNo ratings yet
- Omni Lifenet SpecsDocument2 pagesOmni Lifenet SpecsAngel JuarezNo ratings yet
- KiaOptima Seccion 002Document7 pagesKiaOptima Seccion 002Luis Enrique PeñaNo ratings yet
- PD083 05Document1 pagePD083 05Christian Linares AbreuNo ratings yet
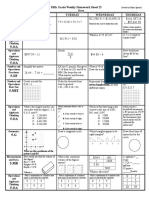
- 3 6 17weekly Homework Sheet Week 23 - 5th Grade - CcssDocument3 pages3 6 17weekly Homework Sheet Week 23 - 5th Grade - Ccssapi-328344919No ratings yet
- Substitution in The Linguistics of Text and Grammatical ThoughtDocument17 pagesSubstitution in The Linguistics of Text and Grammatical ThoughtThảo HanahNo ratings yet
- COE10205, Other Corrosion Monitoring TechniquesDocument62 pagesCOE10205, Other Corrosion Monitoring Techniquesامين100% (1)
- Tutorial Chapter 1 Thermochemistry QuestionsDocument4 pagesTutorial Chapter 1 Thermochemistry Questionssiti nur masyitah nasaruddinNo ratings yet
- Teaser Rheosolve D 15ASDocument2 pagesTeaser Rheosolve D 15ASwahyuni raufianiNo ratings yet
- Tema Line Solutions BrochureDocument8 pagesTema Line Solutions BrochureUmair Mushtaq SyedNo ratings yet
- Panasonic Sx-kc211 User ManualDocument36 pagesPanasonic Sx-kc211 User ManualJoshua Chong100% (1)
- Efficiently Transfer Stock Between PlantsDocument6 pagesEfficiently Transfer Stock Between PlantsSantosh KumarNo ratings yet