You might also like
- Kawasaki Ultra 250x Manual de Taller PDFDocument477 pagesKawasaki Ultra 250x Manual de Taller PDFAntonio Jose Planells100% (3)
- Kinematics in One DimensionDocument16 pagesKinematics in One DimensionApex InstituteNo ratings yet
- Stable and Unstable Manifold, Heteroclinic Trajectories and The PendulumDocument7 pagesStable and Unstable Manifold, Heteroclinic Trajectories and The PendulumEddie BeckNo ratings yet
- Sears Craftsman Broadcast SpreaderDocument4 pagesSears Craftsman Broadcast Spreadercesinco0% (1)
- Langrangian MechanicsDocument41 pagesLangrangian MechanicsLuthfiNo ratings yet
- Generalized CoordinatesDocument8 pagesGeneralized CoordinatesJoshua WoodNo ratings yet
- Gaskin MechanicsDocument47 pagesGaskin MechanicsLia MewwNo ratings yet
- 02 Introduction of Mechanical Vibration IIDocument12 pages02 Introduction of Mechanical Vibration IIRoni AfrianNo ratings yet
- Normal and Tangential Coordinate SystemsDocument5 pagesNormal and Tangential Coordinate Systemsgirma workuNo ratings yet
- Engineering Dynamics 2020 Lecture 4Document48 pagesEngineering Dynamics 2020 Lecture 4Muhammad ShessNo ratings yet
- Chapter 2-1Document18 pagesChapter 2-1الخليل إبراهيمNo ratings yet
- Module 2 VibrDocument10 pagesModule 2 VibrShockBlade ZedNo ratings yet
- Denavit-Hartenberg ParametersDocument6 pagesDenavit-Hartenberg ParametersJavier ReyesNo ratings yet
- Practice Problems For Advanced Vibrations: April 2019Document36 pagesPractice Problems For Advanced Vibrations: April 2019KEVIN CORDOVA RODRIGUEZ100% (1)
- Mathematical DescriptionDocument109 pagesMathematical DescriptionBiswarup BurmanNo ratings yet
- Lectures 3+4Document15 pagesLectures 3+4ediealiNo ratings yet
- Generalized Coordinates: Constraint EquationsDocument10 pagesGeneralized Coordinates: Constraint EquationsUdaya Bhanu Prakash SunkuNo ratings yet
- The Dynamics of Pendula: An Introduction To Hamiltonian Systems and ChaosDocument18 pagesThe Dynamics of Pendula: An Introduction To Hamiltonian Systems and ChaosMohamad SafiNo ratings yet
- Practice Problems For Advanced Vibrations: April 2019Document36 pagesPractice Problems For Advanced Vibrations: April 2019Animesh ChandraNo ratings yet
- Practice Problems For Advanced Vibrations: April 2019Document36 pagesPractice Problems For Advanced Vibrations: April 2019Animesh ChandraNo ratings yet
- Triple LinkageDocument13 pagesTriple Linkagepalerm00No ratings yet
- Denavit-Hartenberg Parameters - WikipediaDocument19 pagesDenavit-Hartenberg Parameters - Wikipediavikas16051998No ratings yet
- 42 Ijmperddec201742Document10 pages42 Ijmperddec201742TJPRC PublicationsNo ratings yet
- Trabajo VibracionesDocument17 pagesTrabajo VibracionesCesar BautistaNo ratings yet
- Bryan Eisenhower and Igor Mezic - Targeted Activation in Deterministic and Stochastic SystemsDocument10 pagesBryan Eisenhower and Igor Mezic - Targeted Activation in Deterministic and Stochastic SystemsYidel4313No ratings yet
- Classical MechanicsDocument16 pagesClassical MechanicsshivanandNo ratings yet
- Dynamical Creation of Entanglement and Steady Entanglement Between Two Spatially Separated - Type AtomsDocument12 pagesDynamical Creation of Entanglement and Steady Entanglement Between Two Spatially Separated - Type AtomsAbdel AhmadNo ratings yet
- Kuramoto 1984Document18 pagesKuramoto 1984Lambu CarmelNo ratings yet
- Input ProcessDocument10 pagesInput ProcessJoy RoyNo ratings yet
- Chapter TwoDocument49 pagesChapter TwoAbenezer MarkNo ratings yet
- Application of Simple Harmonic MotionDocument6 pagesApplication of Simple Harmonic MotionNarayan VarmaNo ratings yet
- Parallel Axis TheoremDocument3 pagesParallel Axis TheoremKareem Ibrahim Mohamed NasrNo ratings yet
- Study of Forced Double PendulumsDocument17 pagesStudy of Forced Double PendulumsrizkibiznizNo ratings yet
- P409M Miller 2008 All PDFDocument112 pagesP409M Miller 2008 All PDFSukishi AdachiNo ratings yet
- A Piezoelectric Rate Gyroscope: Manish Kumar Gautam M.Tech (Sensor Technology)Document19 pagesA Piezoelectric Rate Gyroscope: Manish Kumar Gautam M.Tech (Sensor Technology)manishNo ratings yet
- OthDocument2 pagesOthwesenu abitewNo ratings yet
- Analysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesDocument20 pagesAnalysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesnevinkoshyNo ratings yet
- Analyzing The Compound Seismic System Consisting of RFPS System and Dish SpringDocument10 pagesAnalyzing The Compound Seismic System Consisting of RFPS System and Dish SpringHadiBiesNo ratings yet
- V.D. Andreev - On The General Equations of Inertial Navigation - 1964 PDFDocument19 pagesV.D. Andreev - On The General Equations of Inertial Navigation - 1964 PDFAnonymous OARSwGsNo ratings yet
- Phase Plane Analysis PDFDocument27 pagesPhase Plane Analysis PDFjooooooNo ratings yet
- Inverted PendulumDocument6 pagesInverted PendulumRandyHagenNo ratings yet
- Chapter 04Document20 pagesChapter 04api-3728553No ratings yet
- Lagrangian Formulation of Mechanics: Descriptions of Motion in Configuration SpaceDocument5 pagesLagrangian Formulation of Mechanics: Descriptions of Motion in Configuration SpaceNisar MalikNo ratings yet
- Linear ElasticityDocument10 pagesLinear Elasticityaishwarya25singhNo ratings yet
- Dynamics-Assigment 2Document16 pagesDynamics-Assigment 2imran5705074No ratings yet
- LagrangianDocument23 pagesLagrangianrp dotgNo ratings yet
- RubberbandDocument3 pagesRubberbandMatt MacNo ratings yet
- Classical Mechanics P601Document1 pageClassical Mechanics P601Satyaki ChowdhuryNo ratings yet
- Ultra Long Rug Mor 8p PublishedDocument8 pagesUltra Long Rug Mor 8p PublishednumaidecatNo ratings yet
- WilberforceDocument16 pagesWilberforce123chess0% (1)
- Iclicker: Velocity of The ShoDocument7 pagesIclicker: Velocity of The Shohamza1256No ratings yet
- Lagrangian and Hamiltonian PDFDocument10 pagesLagrangian and Hamiltonian PDFarnab_bhattacharj_26No ratings yet
- Ying Kim 2002Document11 pagesYing Kim 2002ommmdNo ratings yet
- Velocity and Position Control of A Wheel 2 PDFDocument9 pagesVelocity and Position Control of A Wheel 2 PDFdannyabeNo ratings yet
- Constraints-Generalized CoordinatesDocument16 pagesConstraints-Generalized CoordinatesVineet ChauhanNo ratings yet
- CHPT 07Document14 pagesCHPT 07sambarta.sanyalNo ratings yet
- GRABSUM School Inc. Name: Grade Level and Section: 12 - STEMDocument6 pagesGRABSUM School Inc. Name: Grade Level and Section: 12 - STEMWendell CapiliNo ratings yet
- Quantum 97Document1 pageQuantum 97NeoHoodaNo ratings yet
- Type of Coordinate System and Its ApplicationsDocument21 pagesType of Coordinate System and Its ApplicationsMahmoud MahmoudmNo ratings yet
- Received 12 December 2005Document7 pagesReceived 12 December 2005Andres GuevaraNo ratings yet
- Constraints 1Document9 pagesConstraints 1praveen99944100% (2)
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- MECC481 Week7 DynamicsDocument52 pagesMECC481 Week7 DynamicsSydney OlandriaNo ratings yet
- MECC481 - 3 - Differential and Integral Calculus WEEKLY TASKDocument51 pagesMECC481 - 3 - Differential and Integral Calculus WEEKLY TASKSydney OlandriaNo ratings yet
- Assignment 2 PDFDocument6 pagesAssignment 2 PDFSydney OlandriaNo ratings yet
- Narrative Report - Mante, Philip CeasarDocument72 pagesNarrative Report - Mante, Philip CeasarSydney OlandriaNo ratings yet
- Chapter 1Document83 pagesChapter 1Sydney OlandriaNo ratings yet
- MECC481 - 4 - Probability and Statistics Advanced MathDocument70 pagesMECC481 - 4 - Probability and Statistics Advanced MathSydney OlandriaNo ratings yet
- Global Economy2020Document63 pagesGlobal Economy2020Sydney OlandriaNo ratings yet
- Expt 8Document9 pagesExpt 8Sydney OlandriaNo ratings yet
- Script File: Activity 2Document3 pagesScript File: Activity 2Sydney OlandriaNo ratings yet
- MECC481 3 Differential and Integral CalculusDocument138 pagesMECC481 3 Differential and Integral CalculusSydney OlandriaNo ratings yet
- Week3-Courseware-SSP031-CTT8. HUMAN CENTERED DESIGN METHODOLOGYDocument38 pagesWeek3-Courseware-SSP031-CTT8. HUMAN CENTERED DESIGN METHODOLOGYSydney OlandriaNo ratings yet
- Translational Linear SpringsDocument14 pagesTranslational Linear SpringsSydney OlandriaNo ratings yet
- Design Thinking Methodology: Topic 8Document24 pagesDesign Thinking Methodology: Topic 8Sydney OlandriaNo ratings yet
- Vibration Engineering: Engr. Ray H, MlaonjaoDocument9 pagesVibration Engineering: Engr. Ray H, MlaonjaoSydney OlandriaNo ratings yet
- Vibration Engineering: By: Engr. Ray H, MalonjaoDocument12 pagesVibration Engineering: By: Engr. Ray H, MalonjaoSydney OlandriaNo ratings yet
- Coimbatore DataDocument22 pagesCoimbatore Datanikhil indoreinfolineNo ratings yet
- Experiment No. 4 - PROJECTILE Using Phet SimulationDocument6 pagesExperiment No. 4 - PROJECTILE Using Phet SimulationMaica ElliNo ratings yet
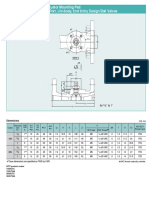
- CT WKM Gate Saf T Seal 01 PDFDocument36 pagesCT WKM Gate Saf T Seal 01 PDFchonubobbyNo ratings yet
- SP58Document141 pagesSP58Umar MohammadNo ratings yet
- MSE 566 Homework Module 3 Solution PDFDocument17 pagesMSE 566 Homework Module 3 Solution PDFArpàn PàtelNo ratings yet
- FT004256 1Document3 pagesFT004256 1cuellarcuellarNo ratings yet
- Static & Rotating EquipmentDocument6 pagesStatic & Rotating EquipmentAnonymous ZPV7AKaBANo ratings yet
- F 85154 PDFDocument4 pagesF 85154 PDFMilena Lemus FonsecaNo ratings yet
- E-021 Auxiliary Engine Performance.04Document2 pagesE-021 Auxiliary Engine Performance.04Rizky Sapugungdo100% (1)
- Din 15018 Part 3Document12 pagesDin 15018 Part 3Alessandro BoniniNo ratings yet
- Hydraulics Chapter Two AssignmentDocument3 pagesHydraulics Chapter Two AssignmentAbelNo ratings yet
- Vdu Fire StarinerDocument6 pagesVdu Fire StarinerkrishnanshwetaNo ratings yet
- STD 12 Physics NumericalsDocument30 pagesSTD 12 Physics NumericalsAranya Bhoumik100% (1)
- Year 2017 163Document21 pagesYear 2017 163Boldie LutwigNo ratings yet
- Stress: Dept. of GeologyDocument33 pagesStress: Dept. of GeologyM Oktada HilmanNo ratings yet
- Water, Density, Specific Enthalpy, ViscosityDocument3 pagesWater, Density, Specific Enthalpy, ViscosityBhaskar BethiNo ratings yet
- A Textbook of Machine Design by R.S.KHURMI AND J.K.GUPTA - 217Document1 pageA Textbook of Machine Design by R.S.KHURMI AND J.K.GUPTA - 217Vivek MishraNo ratings yet
- FBV 2Document1 pageFBV 2pgltuNo ratings yet
- 316 On 6mo - White PaperDocument13 pages316 On 6mo - White Papermarvin_slNo ratings yet
- Flow Instruments Part 1Document20 pagesFlow Instruments Part 1Tirado Melchor Angel Miguel100% (1)
- Sumanta Chowdhury - CLS - Aipmt-15-16 - XIII - Phy - Study-Package-3 - Set-1 - Chapter-9 PDFDocument46 pagesSumanta Chowdhury - CLS - Aipmt-15-16 - XIII - Phy - Study-Package-3 - Set-1 - Chapter-9 PDFsamuel rajNo ratings yet
- PIP289Document11 pagesPIP289Liomessi TotiNo ratings yet
- Speed, Velocity, and Acceleration POWERPOINTDocument33 pagesSpeed, Velocity, and Acceleration POWERPOINTMs Abby GailNo ratings yet
- Coffer Dams ReportDocument20 pagesCoffer Dams ReportSubbaReddyNo ratings yet
- Schwenk - Katalog 2011 ENDocument37 pagesSchwenk - Katalog 2011 END.T.No ratings yet
- The Electronically Controlled ME Engine: Presented by Ole Groene MAN B&W Diesel, DenmarkDocument140 pagesThe Electronically Controlled ME Engine: Presented by Ole Groene MAN B&W Diesel, DenmarkAbdulachim Emin67% (3)
- Introduction To RCCDocument105 pagesIntroduction To RCCMohit DhimanNo ratings yet
- Aircraft & Engine - Technical GeneralDocument16 pagesAircraft & Engine - Technical GeneralprachatNo ratings yet