You might also like
- Geometric and Force Errors Compensation in A 3-Axis CNC Milling MachineDocument16 pagesGeometric and Force Errors Compensation in A 3-Axis CNC Milling MachineDarminsyah AshterNo ratings yet
- Geometric and Force Errors Compensation in A 3-Axis CNC Milling MachineDocument9 pagesGeometric and Force Errors Compensation in A 3-Axis CNC Milling Machinerajeev_kumar365No ratings yet
- Geometric Errors Compensation of CNC Machine ToolDocument6 pagesGeometric Errors Compensation of CNC Machine ToolnenadNo ratings yet
- The Stencil Buffer Sweep Plane Algorithm For 5-Axis CNC Tool Path VerificationDocument14 pagesThe Stencil Buffer Sweep Plane Algorithm For 5-Axis CNC Tool Path VerificationHuy TranNo ratings yet
- Jayaram 2000Document4 pagesJayaram 2000snehal patilNo ratings yet
- Paper v12Document16 pagesPaper v12kue kueNo ratings yet
- Error Prediction and Compensation For CNC Machine ToolsDocument8 pagesError Prediction and Compensation For CNC Machine ToolsRamona Cristina VarbanNo ratings yet
- Modelling of Five-Axis Machine Tool Metrology Models Using The Matrix Summation ApproachDocument6 pagesModelling of Five-Axis Machine Tool Metrology Models Using The Matrix Summation ApproachRaúl DíazNo ratings yet
- Pitch Error in The Manufacturing of Lead ScrewsDocument9 pagesPitch Error in The Manufacturing of Lead Screwsoyuncu81No ratings yet
- Inverse Method For Cutting Forces Parameters Evaluation: Engineering MECHANICS, Vol. 14, 2007, No. 5, P. 1-13Document13 pagesInverse Method For Cutting Forces Parameters Evaluation: Engineering MECHANICS, Vol. 14, 2007, No. 5, P. 1-13Billel LouniciNo ratings yet
- A Hybrid Analytical-And Discrete-Based Methodology For Determining Cutter-Workpiece Engagement in Five-Axis MillingDocument2 pagesA Hybrid Analytical-And Discrete-Based Methodology For Determining Cutter-Workpiece Engagement in Five-Axis MillingEdinNo ratings yet
- Space Curve Interpolation For CNC Machines: Sotiris L. OmirouDocument8 pagesSpace Curve Interpolation For CNC Machines: Sotiris L. OmirouPhan Văn Đại AnNo ratings yet
- A Tool Path Generation Strategy For Three-Axis Ball-End Milling of Free-FormDocument5 pagesA Tool Path Generation Strategy For Three-Axis Ball-End Milling of Free-FormNipo Produção TextualNo ratings yet
- Comprehensive Simulation of Surface Texture For An End-Milling ProcessDocument8 pagesComprehensive Simulation of Surface Texture For An End-Milling Processirinuca12No ratings yet
- A Geometric Accuracy Error Analysis Method For Turn-Milling Combined NC Machine ToolDocument17 pagesA Geometric Accuracy Error Analysis Method For Turn-Milling Combined NC Machine ToolTommy GaoNo ratings yet
- Engineering20100600001 82857529 PDFDocument5 pagesEngineering20100600001 82857529 PDFshailendrabachalNo ratings yet
- 4.13 Coordinate-Measuring MachinesDocument9 pages4.13 Coordinate-Measuring MachinesPranav DabhadeNo ratings yet
- Lamdamap03044fu PDFDocument10 pagesLamdamap03044fu PDFSong BunrithNo ratings yet
- 2005 Comp Method Appl Mech EngDocument22 pages2005 Comp Method Appl Mech Engjhon ortizNo ratings yet
- CNC Interpolators: Algorithms and AnalysisDocument10 pagesCNC Interpolators: Algorithms and AnalysisPham LongNo ratings yet
- 254464.1 Car Mikac VezaDocument6 pages254464.1 Car Mikac VezaengrodeNo ratings yet
- A New Format For 5 Axis Tool Path ComputDocument11 pagesA New Format For 5 Axis Tool Path ComputIlker CetinNo ratings yet
- 3D Reconstruction of Face: A Comparison of Marching Cube and Improved Marching Cube AlgorithmDocument4 pages3D Reconstruction of Face: A Comparison of Marching Cube and Improved Marching Cube AlgorithmKarthik RNo ratings yet
- 2019-Valenzuela-etal-Analysis of Worn Surface Images Using Gradient-Based DescriptorsDocument5 pages2019-Valenzuela-etal-Analysis of Worn Surface Images Using Gradient-Based DescriptorsccviafarNo ratings yet
- Volumetric ErrorDocument18 pagesVolumetric ErrorShiva AlgeriaNo ratings yet
- Hashemian 2020Document12 pagesHashemian 2020lzq8306No ratings yet
- Print Version - SWPSC - April 2023Document16 pagesPrint Version - SWPSC - April 2023api-667912475No ratings yet
- ADA318689Document8 pagesADA318689Biden LeNo ratings yet
- Conway 2012Document10 pagesConway 2012abdulaziz alzaidNo ratings yet
- JSM 3 1 2010Document8 pagesJSM 3 1 2010ganesh0387No ratings yet
- Geometric Error Correction in Coordinate Measurement: Gyula HermannDocument16 pagesGeometric Error Correction in Coordinate Measurement: Gyula HermannJosephRomeraloNo ratings yet
- Cad-Cam (Mme 3103) RcsDocument2 pagesCad-Cam (Mme 3103) RcsMihir RathodNo ratings yet
- Reverse Engineering in CAD Model Reconstruction of Customized Artificial JointDocument5 pagesReverse Engineering in CAD Model Reconstruction of Customized Artificial JointalexNo ratings yet
- Xu2013 Article ANovelKinematicModelForFive-AxDocument11 pagesXu2013 Article ANovelKinematicModelForFive-AxTemp MaipNo ratings yet
- Digital Image Correlation For Tensile TestDocument9 pagesDigital Image Correlation For Tensile TestAli AbbarNo ratings yet
- Drill Ank Measurement and Ank/ Ute Intersection DeterminationDocument11 pagesDrill Ank Measurement and Ank/ Ute Intersection DeterminationbangjjNo ratings yet
- Tool Wear Monitoring - v20180412Document30 pagesTool Wear Monitoring - v20180412SuzanaPetrovicNo ratings yet
- Automatic Reconstruction of 3D CAD Models From Digital ScansDocument35 pagesAutomatic Reconstruction of 3D CAD Models From Digital Scansirinuca12No ratings yet
- Korolev 2018 J. Phys. Conf. Ser. 944 012061Document8 pagesKorolev 2018 J. Phys. Conf. Ser. 944 012061Amel BegićNo ratings yet
- Deformation Analysis of A 3-Axis Gantry System: AbstractDocument4 pagesDeformation Analysis of A 3-Axis Gantry System: AbstractŽan PjerNo ratings yet
- Manou FAIM2022Document8 pagesManou FAIM2022George VosniakosNo ratings yet
- Systematic Geometric Error Modeling For Workspace Volumetric Calibration of A 5-Axis Turbine Blade Grinding MachineDocument12 pagesSystematic Geometric Error Modeling For Workspace Volumetric Calibration of A 5-Axis Turbine Blade Grinding MachineHossein VahediNo ratings yet
- A Method For Enhancing The Accuracy of CNC Machine Tools For On-Machine InspectionDocument9 pagesA Method For Enhancing The Accuracy of CNC Machine Tools For On-Machine InspectionAmandeep Singh ThukralNo ratings yet
- 1 s2.0 S0890695517301165 MainDocument19 pages1 s2.0 S0890695517301165 Mainosei sethNo ratings yet
- Yang 2020Document9 pagesYang 2020lzq8306No ratings yet
- Get Cracking With ANSYS Workbench 19.2 - Digital Engineering 24 - 7Document15 pagesGet Cracking With ANSYS Workbench 19.2 - Digital Engineering 24 - 7Sujay BhattacharyaNo ratings yet
- Self-Intersection Detection and Elimination in Freeform Curves and SurfacesDocument10 pagesSelf-Intersection Detection and Elimination in Freeform Curves and SurfacesŽarko MočnikNo ratings yet
- Configuration Design and Accuracy Analysis of Special Grinding Machine For Thin-Walled Small Concave SurfacesDocument10 pagesConfiguration Design and Accuracy Analysis of Special Grinding Machine For Thin-Walled Small Concave SurfacesTommy GaoNo ratings yet
- Leite 2014Document15 pagesLeite 2014habtewoldNo ratings yet
- 1 s2.0 S0924013699003106 MainDocument5 pages1 s2.0 S0924013699003106 MainHugo CostaNo ratings yet
- Tolerance Charting PDFDocument7 pagesTolerance Charting PDFSudeep Kumar SinghNo ratings yet
- Sciencedirect: Cutting Simulations Using A Commercially Available 2D/3D Fem Software For FormingDocument6 pagesSciencedirect: Cutting Simulations Using A Commercially Available 2D/3D Fem Software For FormingNkengafac Armstrong menjuaNo ratings yet
- Machines 11 00496Document16 pagesMachines 11 00496Abdul GhaniNo ratings yet
- 3D Dual BEM - CisilinoDocument10 pages3D Dual BEM - CisilinoJhon19806No ratings yet
- Aug2001 - Mechanistic Modeling of The Ball End Milling Process For Multi-Axis Machining of Free-Form SurfacesDocument11 pagesAug2001 - Mechanistic Modeling of The Ball End Milling Process For Multi-Axis Machining of Free-Form SurfacesusamaumerNo ratings yet
- Ratchev - 2004 - Milling Error Prediction and Compensation in Machining of Low - Rigidity PartsDocument13 pagesRatchev - 2004 - Milling Error Prediction and Compensation in Machining of Low - Rigidity PartsHui HeNo ratings yet
- MS5200 - HW1 - 23123001 - A Review On Geometrical Measurement Methods For Machine ToolsDocument2 pagesMS5200 - HW1 - 23123001 - A Review On Geometrical Measurement Methods For Machine Toolsfakihilham2705No ratings yet
- Ojpstmp Stamppdf D 23T09 18 RSINAK 83 5 053708 1Document6 pagesOjpstmp Stamppdf D 23T09 18 RSINAK 83 5 053708 1lxningNo ratings yet
- Windows XP Sp2 SerialDocument4 pagesWindows XP Sp2 SerialPapillon Rose FleurNo ratings yet
- Ranap Release CauseDocument397 pagesRanap Release CauseKamana Khare0% (1)
- Google Apps For Education Tips For Teachers by TeachersDocument19 pagesGoogle Apps For Education Tips For Teachers by TeachersmnorkunNo ratings yet
- CD Final PDFDocument140 pagesCD Final PDFGursimar SinghNo ratings yet
- FDL-3 BOM Auto TailDocument2 pagesFDL-3 BOM Auto TailRafael ReisNo ratings yet
- The Color WheelDocument33 pagesThe Color WheeldetNo ratings yet
- Power Thyristor Data SheetsDocument72 pagesPower Thyristor Data SheetsArt Del R SalongaNo ratings yet
- GCE Advanced Level - ICT - தரவுத்தள முகாமைத்துவ முறைமைDocument57 pagesGCE Advanced Level - ICT - தரவுத்தள முகாமைத்துவ முறைமைThanuNo ratings yet
- Cloud Computing Book (2017-Regulation) PDF-1-89 Unit - I & IIDocument89 pagesCloud Computing Book (2017-Regulation) PDF-1-89 Unit - I & IIVishnu Kumar KumarNo ratings yet
- DX100 Brake ReleaseDocument13 pagesDX100 Brake ReleaseRodrigo CaldeiraNo ratings yet
- Data Stage Scenarios: Scenario1. Cummilative SumDocument13 pagesData Stage Scenarios: Scenario1. Cummilative Sumabreddy2003No ratings yet
- ASME PVP Conference Paris France July 2013Document11 pagesASME PVP Conference Paris France July 2013zoranNo ratings yet
- E WASTE Seminar ReportDocument27 pagesE WASTE Seminar Reportmonika thakurNo ratings yet
- Vax020 Ds en V03aDocument2 pagesVax020 Ds en V03aNirmal mehtaNo ratings yet
- Multimedia Networking ApplicationsDocument2 pagesMultimedia Networking ApplicationsHasanain AliNo ratings yet
- Confirm Napolcom SlipDocument2 pagesConfirm Napolcom SlipMarkjason castilloNo ratings yet
- Learning Unit 9Document26 pagesLearning Unit 9sphamandla kubhekaNo ratings yet
- Strategic Retail Management Downloaded / AdaptedDocument191 pagesStrategic Retail Management Downloaded / AdaptedAdv AravindNo ratings yet
- Application Note: Optimizing Code Performance and Size For Stellaris® MicrocontrollersDocument21 pagesApplication Note: Optimizing Code Performance and Size For Stellaris® MicrocontrollersVănThịnhNo ratings yet
- Safetica Professional ServicesDocument6 pagesSafetica Professional ServicesMing LeNo ratings yet
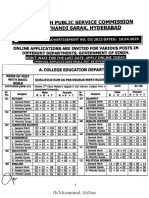
- 1000+ Education, Police & Anti Corruption Jobs Through SPSCDocument12 pages1000+ Education, Police & Anti Corruption Jobs Through SPSCZahid AliNo ratings yet
- Electrical Test InstrumentsDocument44 pagesElectrical Test Instrumentsשמעון פרידמןNo ratings yet
- Mvaa13 CortecDocument9 pagesMvaa13 CortecPraneeth Madhushan BandaraNo ratings yet
- Three Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlDocument29 pagesThree Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlPankaj SahlotNo ratings yet
- Certified Ethical Hacker Ecourse: Order DetailsDocument1 pageCertified Ethical Hacker Ecourse: Order DetailsJacobus BooysenNo ratings yet
- Assignments Answers 18-21Document3 pagesAssignments Answers 18-21Aska DomanskayaNo ratings yet
- EXP-LG-048822 Lighting Management - Wall mounting-DT-360°-for 93 M Areas - Flush MountingDocument1 pageEXP-LG-048822 Lighting Management - Wall mounting-DT-360°-for 93 M Areas - Flush MountingPercy GoitsemangNo ratings yet
- GCMS Clarus600 Gde Turbomass Gcms SoftwareusersguideDocument796 pagesGCMS Clarus600 Gde Turbomass Gcms SoftwareusersguidesuhaibNo ratings yet
- IEEE Xplore Abstract - Automatic Recommendation of API Methods From Feature RequestsDocument2 pagesIEEE Xplore Abstract - Automatic Recommendation of API Methods From Feature RequestsKshitija SahaniNo ratings yet
- 10 1 1 37 307Document50 pages10 1 1 37 307Oluponmile AdeolaNo ratings yet