You might also like
- Assessment of Crash Occurrence UsingDocument15 pagesAssessment of Crash Occurrence UsingSema AlhyasatNo ratings yet
- Real-Time Traffic Accidents Post-Impact Prediction - Based On Crowdsourcing DataDocument11 pagesReal-Time Traffic Accidents Post-Impact Prediction - Based On Crowdsourcing DataAnatta OngNo ratings yet
- A Method For Relating Type of Crash To Tra C Ow Characteristics On Urban FreewaysDocument28 pagesA Method For Relating Type of Crash To Tra C Ow Characteristics On Urban FreewaysHajarath Prasad AbburuNo ratings yet
- A Deep Learning Approach For Traffic Incident Detection in Urban NetworksDocument6 pagesA Deep Learning Approach For Traffic Incident Detection in Urban Networksmurari kumarNo ratings yet
- Transportation Research Part C: Jia Zheng Zhu, Jin Xin Cao, Yuan ZhuDocument16 pagesTransportation Research Part C: Jia Zheng Zhu, Jin Xin Cao, Yuan ZhujoanaNo ratings yet
- Accident Analysis and Prevention: Amir Bahador Parsa, Homa Taghipour, Sybil Derrible, Abolfazl (Kouros) Mohammadian TDocument9 pagesAccident Analysis and Prevention: Amir Bahador Parsa, Homa Taghipour, Sybil Derrible, Abolfazl (Kouros) Mohammadian TSanthana KrishnanNo ratings yet
- Cheng 2005Document17 pagesCheng 2005Shivendra Pratap SinghNo ratings yet
- Abdel-Aty and Pande2005Document12 pagesAbdel-Aty and Pande2005William SasakiNo ratings yet
- Smart Signal Control System For Accident Prevention and Arterial Speed Harmonization Under Connected Vehicle EnvironmentDocument11 pagesSmart Signal Control System For Accident Prevention and Arterial Speed Harmonization Under Connected Vehicle Environmentchongqi heNo ratings yet
- Automated Analysis of Road Safety With Video Data: Nicolas Saunier and Tarek SayedDocument8 pagesAutomated Analysis of Road Safety With Video Data: Nicolas Saunier and Tarek SayedhamidNo ratings yet
- Traffic MANAGEMENT THEORY BY EEHDocument14 pagesTraffic MANAGEMENT THEORY BY EEHEgesu HenryNo ratings yet
- 2013HCI232Document11 pages2013HCI232AbuAlbertNo ratings yet
- Literature Review On Traffic SignalsDocument4 pagesLiterature Review On Traffic Signalsaflstquqx100% (1)
- Traffic Congestion Research PaperDocument6 pagesTraffic Congestion Research Paperc9spy2qz100% (1)
- Gauthier2018 PDFDocument12 pagesGauthier2018 PDFRuben JPNo ratings yet
- The Impact of Weather Data On Traffic Flow Prediction ModelsDocument9 pagesThe Impact of Weather Data On Traffic Flow Prediction ModelsIAES IJAINo ratings yet
- A Real Time Crash Prediction Fusion Framework - 2020 - Transportation ResearchDocument24 pagesA Real Time Crash Prediction Fusion Framework - 2020 - Transportation Researchm saadullah khanNo ratings yet
- A Novel Fuzzy-Based Convolutional Neural Network Method To Traffic Flow Prediction With Uncertain Traffic Accident InformationDocument15 pagesA Novel Fuzzy-Based Convolutional Neural Network Method To Traffic Flow Prediction With Uncertain Traffic Accident Informationsohel ranaNo ratings yet
- Un Método para Identificar Los Riesgos de Colisión Trasera Utilizando Detectores de Bucle InductivoDocument7 pagesUn Método para Identificar Los Riesgos de Colisión Trasera Utilizando Detectores de Bucle Inductivofelix_007_villedaNo ratings yet
- 2011 - ) Prediction of Arrival Times and HumanDocument32 pages2011 - ) Prediction of Arrival Times and Human윤정현No ratings yet
- Chapter-2 Literature ReviewDocument13 pagesChapter-2 Literature ReviewMiko SupremoNo ratings yet
- Research Article: Real-Time Incident Detection and Capacity Estimation Using Loop Detector DataDocument14 pagesResearch Article: Real-Time Incident Detection and Capacity Estimation Using Loop Detector DataMafiazoNo ratings yet
- Journal of Loss Prevention in The Process Industries: Laihao Ma, Xiaoxue Ma, Yang Liu, Wanyi Deng, He LanDocument10 pagesJournal of Loss Prevention in The Process Industries: Laihao Ma, Xiaoxue Ma, Yang Liu, Wanyi Deng, He LanAhmad MuhsininNo ratings yet
- Computer Aided Civil Eng - 2010 - Lee - A Computerized Feature Selection Method Using Genetic Algorithms To ForecastDocument17 pagesComputer Aided Civil Eng - 2010 - Lee - A Computerized Feature Selection Method Using Genetic Algorithms To Forecastwangxiaozhu7812No ratings yet
- Research Article: A Bayesian Network Approach To Causation Analysis of Road Accidents Using NeticaDocument19 pagesResearch Article: A Bayesian Network Approach To Causation Analysis of Road Accidents Using NeticaAsh AnanNo ratings yet
- Traffic Recovery Time Estimation Under Different Flow Regimes in Traffic SimulationDocument10 pagesTraffic Recovery Time Estimation Under Different Flow Regimes in Traffic SimulationAnatta OngNo ratings yet
- Basics of Structural AnalysisDocument13 pagesBasics of Structural AnalysisOluwafemi AdelekeNo ratings yet
- Establishing Face and Content Validity of A Survey To Assess Users' Perceptions of Automated VehiclesDocument10 pagesEstablishing Face and Content Validity of A Survey To Assess Users' Perceptions of Automated VehiclesCivil Engineering PDFNo ratings yet
- F1894 English e TarjomeDocument8 pagesF1894 English e TarjomerezaNo ratings yet
- Accident Analysis and Prevention: William Young, Amir Sobhani, Michael G. Lenn E, Majid SarviDocument15 pagesAccident Analysis and Prevention: William Young, Amir Sobhani, Michael G. Lenn E, Majid Sarvinurgül durmazNo ratings yet
- Identification of Vehicle-Pedestrian Collision - Yao 2018Document11 pagesIdentification of Vehicle-Pedestrian Collision - Yao 2018Lasmini AmbarwatiNo ratings yet
- 1 s2.0 S0001457505002058 Main PDFDocument11 pages1 s2.0 S0001457505002058 Main PDFJefherson ContrerasNo ratings yet
- Road Traffic Prediction Using Bayesian Networks: Poo Kuan Hoong, Ian K. T. Tan, Ong Kok Chien, Choo-Yee TingDocument5 pagesRoad Traffic Prediction Using Bayesian Networks: Poo Kuan Hoong, Ian K. T. Tan, Ong Kok Chien, Choo-Yee TingsidxxxnitcNo ratings yet
- Causal Inference in Transportation Safety Studies - Comparison of Potential Outcomes and Causal DiagramsDocument28 pagesCausal Inference in Transportation Safety Studies - Comparison of Potential Outcomes and Causal DiagramsEmmanuel FernandezNo ratings yet
- Zhan 2017Document19 pagesZhan 2017maulida hakimNo ratings yet
- Transportation Research Part C: Chengcheng Xu, Wei Wang, Pan Liu, Rui Guo, Zhibin LiDocument10 pagesTransportation Research Part C: Chengcheng Xu, Wei Wang, Pan Liu, Rui Guo, Zhibin LiJefherson ContrerasNo ratings yet
- Calibration of Vissim Models For Rural Freeway Lane Closures: Novel Approach To The Modification of Key ParametersDocument10 pagesCalibration of Vissim Models For Rural Freeway Lane Closures: Novel Approach To The Modification of Key ParametersGanesh VhanamaneNo ratings yet
- tmpEA3E TMPDocument9 pagestmpEA3E TMPFrontiersNo ratings yet
- Aggregation of Condition Survey Data in Pavement Management: Shortcomings of A Homogeneous Sections Approach and How To Avoid ThemDocument14 pagesAggregation of Condition Survey Data in Pavement Management: Shortcomings of A Homogeneous Sections Approach and How To Avoid ThemSyed MubashirhussainNo ratings yet
- Overview of Traffic Incident Duration Analysis and PredictionDocument13 pagesOverview of Traffic Incident Duration Analysis and Predictionanusha meesalaNo ratings yet
- 1 s2.0 S0305054821000459 MainDocument14 pages1 s2.0 S0305054821000459 Maintariq shahNo ratings yet
- Traffic Flow Prediction Using Deep Learning TechniquesDocument18 pagesTraffic Flow Prediction Using Deep Learning Techniquessubh.goswami6537No ratings yet
- Short Term Traffic Prediction Models ReviewDocument21 pagesShort Term Traffic Prediction Models Reviewm_tariq_hnNo ratings yet
- Advanced Technology: Accident Research C ENT R EDocument16 pagesAdvanced Technology: Accident Research C ENT R EPrică TicăNo ratings yet
- Driver Behavior Classification at Intersections and Validation On Large Naturalistic Data SetDocument13 pagesDriver Behavior Classification at Intersections and Validation On Large Naturalistic Data SetJim C. ValenciaNo ratings yet
- 9806 - Manual Human Factors For Safety Audits Ed 1 (En)Document20 pages9806 - Manual Human Factors For Safety Audits Ed 1 (En)Gaurav SinghNo ratings yet
- Vijayalakshmi.G-AI Based Rush Collision Prevention in RailwaysDocument9 pagesVijayalakshmi.G-AI Based Rush Collision Prevention in RailwaysAnil KumarNo ratings yet
- The Multi-State Maritime Transportation System Risk Assessment and Safety AnalysisDocument18 pagesThe Multi-State Maritime Transportation System Risk Assessment and Safety AnalysisRyan Brylle LuzonNo ratings yet
- Analyzing Raised Median Safety Impacts Using Bayesian Methods - 2011Document8 pagesAnalyzing Raised Median Safety Impacts Using Bayesian Methods - 2011UsamaNo ratings yet
- Collective Traffic ForecastingDocument15 pagesCollective Traffic ForecastingnaufraghiNo ratings yet
- Getis-Ord Spatial Statistics To Identify Hot Spots by Using Incident Management DataDocument11 pagesGetis-Ord Spatial Statistics To Identify Hot Spots by Using Incident Management DataGideon Eka DirgantaraNo ratings yet
- Short Term Traffic Forecasting Where W - 2014 - Transportation Research Part CDocument17 pagesShort Term Traffic Forecasting Where W - 2014 - Transportation Research Part CRamses BoxbergNo ratings yet
- Analysing The Impact of Road Information System On Tra 2017 Procedia EngineeDocument10 pagesAnalysing The Impact of Road Information System On Tra 2017 Procedia EngineeIts JhoreyNo ratings yet
- Vehicle PatternDocument16 pagesVehicle PatternShashankNo ratings yet
- Transportation Research Part C: Nicholas G. Polson, Vadim O. SokolovDocument17 pagesTransportation Research Part C: Nicholas G. Polson, Vadim O. SokolovSNKNo ratings yet
- Wa0017.Document8 pagesWa0017.Prince MensahNo ratings yet
- Effects of Traffic Signal CoorDocument14 pagesEffects of Traffic Signal CoorAishah RashedNo ratings yet
- 1 s2.0 S2095756420301410 MainDocument16 pages1 s2.0 S2095756420301410 MainrabiaNo ratings yet
- Research in Transportation Economics: Gisle Solvoll, Terje Andreas Mathisen, Morten WeldeDocument8 pagesResearch in Transportation Economics: Gisle Solvoll, Terje Andreas Mathisen, Morten WeldeTiNo ratings yet
- Faq SR4DDocument6 pagesFaq SR4Dprabhu chand alluriNo ratings yet
- H Final UpdatedDocument3 pagesH Final Updatedprabhu chand alluriNo ratings yet
- iRAP for Safer Cities: How Road Safety Ratings Can Help Achieve Vision Zero GoalsDocument4 pagesiRAP for Safer Cities: How Road Safety Ratings Can Help Achieve Vision Zero Goalsprabhu chand alluriNo ratings yet
- J0 Edm Uq CLR 24 I XFK HuigDocument60 pagesJ0 Edm Uq CLR 24 I XFK Huigprabhu chand alluriNo ratings yet
- Vaccines For Roads V BrochureDocument8 pagesVaccines For Roads V Brochureprabhu chand alluriNo ratings yet
- J Ijtst 2017 07 004Document15 pagesJ Ijtst 2017 07 004prabhu chand alluriNo ratings yet
- IRAP Plan For Decade of ActionDocument4 pagesIRAP Plan For Decade of Actionprabhu chand alluriNo ratings yet
- Ram Kumar 2020Document7 pagesRam Kumar 2020prabhu chand alluriNo ratings yet
- IRAP Plan For Decade of ActionDocument4 pagesIRAP Plan For Decade of Actionprabhu chand alluriNo ratings yet
- TVC - 315+000 7 Days Hourly WiseDocument14 pagesTVC - 315+000 7 Days Hourly Wiseprabhu chand alluriNo ratings yet
- Journalist 1572694501Document1 pageJournalist 1572694501prabhu chand alluriNo ratings yet
- Road Accident Analysis and Prediction of Accident Severity by Using Machine Learning in BangladeshDocument6 pagesRoad Accident Analysis and Prediction of Accident Severity by Using Machine Learning in Bangladeshprabhu chand alluriNo ratings yet
- Survey Formats - Kothakota KurnoolDocument6 pagesSurvey Formats - Kothakota Kurnoolprabhu chand alluriNo ratings yet
- Commodity Codes Code CommodityDocument1 pageCommodity Codes Code Commodityprabhu chand alluriNo ratings yet
- LukOlszewski Integrated 2003Document12 pagesLukOlszewski Integrated 2003prabhu chand alluriNo ratings yet
- 121+150 Axle LoadDocument3 pages121+150 Axle Loadprabhu chand alluriNo ratings yet
- BBD Analysis For PracticeDocument23 pagesBBD Analysis For Practiceprabhu chand alluriNo ratings yet
- Turbo-Roundabouts A Model To Evaluate Ca20160124-11242-1gc8a7zDocument12 pagesTurbo-Roundabouts A Model To Evaluate Ca20160124-11242-1gc8a7zprabhu chand alluriNo ratings yet
- 101+500 Axle LoadDocument6 pages101+500 Axle Loadprabhu chand alluriNo ratings yet
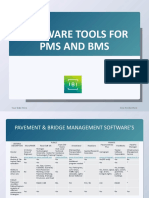
- PMS & BMS SoftwaresDocument8 pagesPMS & BMS Softwaresprabhu chand alluriNo ratings yet
- Software Tools For Pms and BmsDocument3 pagesSoftware Tools For Pms and Bmsprabhu chand alluriNo ratings yet
- PMS & BMS SoftwaresDocument8 pagesPMS & BMS Softwaresprabhu chand alluriNo ratings yet
- Turbo-Roundabouts A Model To Evaluate Ca20160124-11242-1gc8a7z PDFDocument16 pagesTurbo-Roundabouts A Model To Evaluate Ca20160124-11242-1gc8a7z PDFprabhu chand alluriNo ratings yet
- Roundabout Capacity Empricial Method PDFDocument10 pagesRoundabout Capacity Empricial Method PDFPiitu AndrasNo ratings yet
- Understanding Probability - Chances, Likelihoods and Outcomes ExplainedDocument13 pagesUnderstanding Probability - Chances, Likelihoods and Outcomes ExplainedClaire CorpuzNo ratings yet
- Calculate The Mean, Variance, and Standard Deviation of The Following Distribution of ScoresDocument9 pagesCalculate The Mean, Variance, and Standard Deviation of The Following Distribution of ScoresBlue RosesNo ratings yet
- Manual Che301Document53 pagesManual Che301fitashah2634No ratings yet
- Roj and Venchu Thesis RevisedDocument30 pagesRoj and Venchu Thesis RevisedMark Robles Salvador87% (15)
- Summer Training Report Whirlpool RahulDocument54 pagesSummer Training Report Whirlpool RahulStranger xxxNo ratings yet
- Interpretation and Use of Results From Interlaboratory Testing of Chemical Analysis MethodsDocument13 pagesInterpretation and Use of Results From Interlaboratory Testing of Chemical Analysis MethodsEric GozzerNo ratings yet
- Leadership style impacts employee performanceDocument8 pagesLeadership style impacts employee performanceRiski AlfalahNo ratings yet
- Fuchs-Practical Guide To The Determination of Minerals by The Blowpipe 1868Document182 pagesFuchs-Practical Guide To The Determination of Minerals by The Blowpipe 1868RonLayton100% (1)
- Cover Letter DCOP Chemonics UgandaDocument2 pagesCover Letter DCOP Chemonics UgandaJacqueline Takubwa MpangaNo ratings yet
- Sekala and Niskala Accountability Practices in The Clan-Based Organization MGPSSR in Bali, IndonesiaDocument5 pagesSekala and Niskala Accountability Practices in The Clan-Based Organization MGPSSR in Bali, Indonesiarobert0rojerNo ratings yet
- Article of HanaDocument7 pagesArticle of HanaHenok AsemahugnNo ratings yet
- (PDF) Village Road ConstructionDocument25 pages(PDF) Village Road ConstructionpradeepNo ratings yet
- Thesis Machine Sheridan BakerDocument7 pagesThesis Machine Sheridan BakerProfessionalPaperWriterEverett100% (1)
- Aqa English Language Coursework A LevelDocument6 pagesAqa English Language Coursework A Levelafiwfbuoy100% (2)
- 1106 FullDocument14 pages1106 Fullmarcos viniciusNo ratings yet
- Guidelines For Preparing Project Reports: Information Society Technologies Ist ProgrammeDocument30 pagesGuidelines For Preparing Project Reports: Information Society Technologies Ist ProgrammeSabhaya ChiragNo ratings yet
- Analytical Expressions For DG Allocation in Primary Distribution NetworksDocument7 pagesAnalytical Expressions For DG Allocation in Primary Distribution NetworksfaridaNo ratings yet
- Basic Research TemplateDocument13 pagesBasic Research TemplateKristian Jay Lademora NantaNo ratings yet
- Emerging Issues in Communication ResearchDocument18 pagesEmerging Issues in Communication ResearchAdekunle BensonNo ratings yet
- List of Medical Colleges in KeralaDocument4 pagesList of Medical Colleges in KeralaNithesh GowdaNo ratings yet
- Journal of Affective Disorders ReportsDocument8 pagesJournal of Affective Disorders ReportsBAISHA BARETENo ratings yet
- Difference in reading comprehension between print and digital formatsDocument41 pagesDifference in reading comprehension between print and digital formatsCedrick StevenNo ratings yet
- VisionDocument5 pagesVisionArlynNo ratings yet
- Effectiveness of Video Assisted Teaching Module On Knowledge and Attitude Regarding Health Effects of Internet Addiction Disorders Among AdolescentsDocument4 pagesEffectiveness of Video Assisted Teaching Module On Knowledge and Attitude Regarding Health Effects of Internet Addiction Disorders Among AdolescentsAnonymous lAfk9gNPNo ratings yet
- Spectral Reflectance Natural Targets Remote Sensing Studies NASADocument188 pagesSpectral Reflectance Natural Targets Remote Sensing Studies NASAapi-3707222100% (1)
- CKB 20104 Reaction Engineering UniKL MICET Experiment 2a Effect of RTD On The Reaction in CSTR Full Lab ReportDocument29 pagesCKB 20104 Reaction Engineering UniKL MICET Experiment 2a Effect of RTD On The Reaction in CSTR Full Lab ReportSiti Hajar Mohamed100% (6)
- VNT Step 3 Group 212032 - 42Document7 pagesVNT Step 3 Group 212032 - 42Amaury RamirezNo ratings yet
- London Mathematical SocietyDocument56 pagesLondon Mathematical SocietyRommel CGNo ratings yet
- Chapter 3.3 - Foreign Case StudiesDocument13 pagesChapter 3.3 - Foreign Case StudiesEdjey Luis F. Matinong100% (1)