You might also like
- 2 2 Axial LoadingDocument22 pages2 2 Axial LoadingSyed Enamur Rahman RuhanNo ratings yet
- Lectures 7 - 02.27.2017Document17 pagesLectures 7 - 02.27.2017aceNo ratings yet
- Advances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenFrom EverandAdvances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenR. BrillNo ratings yet
- Poisson's Ratio and Theories of Failure ReviewDocument21 pagesPoisson's Ratio and Theories of Failure ReviewMuhammad AdilNo ratings yet
- MM 312 Solid Mechanics 2 Chapter 1 (Part 2) : Presented By: Dr. Farid Mahboubi NasrekaniDocument24 pagesMM 312 Solid Mechanics 2 Chapter 1 (Part 2) : Presented By: Dr. Farid Mahboubi NasrekaniMohammed IbrahimNo ratings yet
- Lasticity: Geology 351 - Geophysical Methods For Geology, Engineering and Environmental Sciences (ATH)Document2 pagesLasticity: Geology 351 - Geophysical Methods For Geology, Engineering and Environmental Sciences (ATH)አንተነህ ኃይሌ ክንፈገብርኤልNo ratings yet
- Mechanics-2 2 Axial LoadingDocument22 pagesMechanics-2 2 Axial LoadingMuhd NizammudinNo ratings yet
- Constitutive Equations and Linear Elasticity: Fall, 2006Document41 pagesConstitutive Equations and Linear Elasticity: Fall, 2006kostNo ratings yet
- General Hooke's LawDocument5 pagesGeneral Hooke's LawKirito KazutoNo ratings yet
- Chapter 3-Soil 1Document135 pagesChapter 3-Soil 1Ruth Sangalang-GabrilloNo ratings yet
- Generalized Hook's Law: Stres-Strain RelationDocument12 pagesGeneralized Hook's Law: Stres-Strain RelationbrintopvNo ratings yet
- Chapter 2-Two Dimensional Linear Theory of Elasticity-1Document43 pagesChapter 2-Two Dimensional Linear Theory of Elasticity-1Norsyazwani Abdul RashidNo ratings yet
- CH 4Document29 pagesCH 4choopo100% (1)
- Lec -7-Mat-Property-RelasionshipDocument22 pagesLec -7-Mat-Property-Relasionshiphurairabaig37No ratings yet
- Chapter 5Document74 pagesChapter 5purijatinNo ratings yet
- Solid MechanicsDocument12 pagesSolid MechanicsÅñírbāñ SārkârNo ratings yet
- ME 555 Stress Analysis Unit 1Document109 pagesME 555 Stress Analysis Unit 1TheoNo ratings yet
- Transformation of Plane StressDocument27 pagesTransformation of Plane StressDave Harrison FloresNo ratings yet
- Elasticity and Plasticity PrinciplesDocument37 pagesElasticity and Plasticity PrinciplesOsama MohammedNo ratings yet
- Bending of Beams: Mech - Eng 362 Stress AnalysisDocument8 pagesBending of Beams: Mech - Eng 362 Stress AnalysisCuGáyLâmĐồngNo ratings yet
- Stress-Strain and Temperature Relationship Chapter-5Document74 pagesStress-Strain and Temperature Relationship Chapter-5venkeekuNo ratings yet
- Seismology: Eric Calais Purdue University Department of Earth and Atmospheric Sciences West Lafayette, IN 47907-1397Document33 pagesSeismology: Eric Calais Purdue University Department of Earth and Atmospheric Sciences West Lafayette, IN 47907-1397Marta MinorNo ratings yet
- Finite Element Method-Elements of Elasticity: BY ANJALI A (1211108) JEYAGOMATHI (1211136)Document23 pagesFinite Element Method-Elements of Elasticity: BY ANJALI A (1211108) JEYAGOMATHI (1211136)Makesh Kumar100% (1)
- Stresses Around Horizontal Boreholes Drilled in Sedimentary RocksDocument12 pagesStresses Around Horizontal Boreholes Drilled in Sedimentary RocksVíctor CarvallidoNo ratings yet
- Stress - Strain RelationsDocument7 pagesStress - Strain RelationsMechanical ZombieNo ratings yet
- Theory of Plates and ShellsDocument72 pagesTheory of Plates and ShellsGirish DeshmukhNo ratings yet
- Poisson's Ratio: Mechanics of Solids - Me 213 Chapter-2Document22 pagesPoisson's Ratio: Mechanics of Solids - Me 213 Chapter-2WaleedNo ratings yet
- Elastic Properties of Isotropic and Orthotropic MaterialsDocument26 pagesElastic Properties of Isotropic and Orthotropic Materialsmanav fakeyNo ratings yet
- Chapter 9Document72 pagesChapter 9Elmar CuellarNo ratings yet
- Presentation 2Document41 pagesPresentation 2halil yıldırımNo ratings yet
- CH 03Document11 pagesCH 03yassine.bouazziNo ratings yet
- 2015F CENG 6011 Lecture Materials Part 1Document51 pages2015F CENG 6011 Lecture Materials Part 1አንዋርጀማልNo ratings yet
- Seismic Data Processing ExplainedDocument119 pagesSeismic Data Processing ExplainedIvan AvramovNo ratings yet
- EJGETHEORYOFELASTICITYDocument19 pagesEJGETHEORYOFELASTICITYJULIAN ANDRES RESTREPO PABONNo ratings yet
- MEng6302 Lecture 3 Fundamental Concepts ASM 2021Document22 pagesMEng6302 Lecture 3 Fundamental Concepts ASM 2021KKDhNo ratings yet
- Stress - Relations: StrainDocument7 pagesStress - Relations: StrainPranay ReddyNo ratings yet
- Finite Element Analysis Theory: Weighted Residual MethodsDocument67 pagesFinite Element Analysis Theory: Weighted Residual MethodsjahirNo ratings yet
- Bending, Shear and TorsionDocument7 pagesBending, Shear and TorsionBonaventure Mills-DadsonNo ratings yet
- FEA Best Pract 19.0 M02 Element TheoryDocument58 pagesFEA Best Pract 19.0 M02 Element TheoryRama BaruvaNo ratings yet
- Section 2: Finite Element Analysis TheoryDocument67 pagesSection 2: Finite Element Analysis TheoryKarthik SNo ratings yet
- Lecture17 PDFDocument9 pagesLecture17 PDFHuseyin OztoprakNo ratings yet
- 2D Elasticity TheoryDocument11 pages2D Elasticity Theoryadela kingNo ratings yet
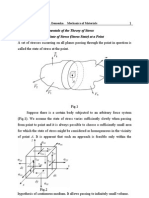
- LECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A PointDocument6 pagesLECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A Pointwinowich5813No ratings yet
- Elasticity and Plasticity Homework ProblemsDocument2 pagesElasticity and Plasticity Homework ProblemsJaswanth SaiNo ratings yet
- Material Laws Relating Stress and Strain: AboveDocument3 pagesMaterial Laws Relating Stress and Strain: AboveRashNo ratings yet
- NOTES Stress Strain STUDENTDocument5 pagesNOTES Stress Strain STUDENTAntonio MateosNo ratings yet
- MOM I - Module 38Document9 pagesMOM I - Module 38Muhammad HabibNo ratings yet
- Modulo 38 Ley Hooke IsotropicosDocument9 pagesModulo 38 Ley Hooke IsotropicosyaslokNo ratings yet
- Solid Mech Assignment 2Document4 pagesSolid Mech Assignment 2sayan mukherjeeNo ratings yet
- Stress-Strain Relations and Elastic ConstantsDocument6 pagesStress-Strain Relations and Elastic ConstantsEuNo ratings yet
- Formula Notes Som 35 33Document46 pagesFormula Notes Som 35 33Devika shettyNo ratings yet
- Advanced Dynamics of Structures 10Document27 pagesAdvanced Dynamics of Structures 10Halil ZeyrekNo ratings yet
- Ch.7. Plane Linear Elasticity: Multimedia Course On Continuum MechanicsDocument69 pagesCh.7. Plane Linear Elasticity: Multimedia Course On Continuum MechanicsNguyễn TúNo ratings yet
- Chapter 9 Characteristics of A FRC LaminaDocument26 pagesChapter 9 Characteristics of A FRC LaminaNarendra GadkariNo ratings yet
- Application of Relations Between Seismic Amplitude PDFDocument18 pagesApplication of Relations Between Seismic Amplitude PDFmosco_scridbNo ratings yet
- Continuum Mechanics-Lecture-2-20sept16 PDFDocument63 pagesContinuum Mechanics-Lecture-2-20sept16 PDFGirish DeshmukhNo ratings yet
- Crack-Tip Field: ES 247 Fracture Mechanics Zhigang SuoDocument12 pagesCrack-Tip Field: ES 247 Fracture Mechanics Zhigang SuoRamesh SantanaNo ratings yet
- Elastic Theory of Plates Explained in DetailDocument17 pagesElastic Theory of Plates Explained in DetailYüksel KayaNo ratings yet
- Walkabout: Penguin Readers FactsheetsDocument4 pagesWalkabout: Penguin Readers Factsheetsi Gl1cHNo ratings yet
- Beneficial Utilisation of Sasol Coal Gasification Ash: Martin Ginster and Ratale H. MatjieDocument5 pagesBeneficial Utilisation of Sasol Coal Gasification Ash: Martin Ginster and Ratale H. MatjieAnonymous fS6Znc9No ratings yet
- Kajian Pengaruh Variasi Penambahan Bahan Accelerator Terhadap Parameter Beton Memadat Mandiri Dan Kuat Tekan Beton Mutu TinggiDocument7 pagesKajian Pengaruh Variasi Penambahan Bahan Accelerator Terhadap Parameter Beton Memadat Mandiri Dan Kuat Tekan Beton Mutu TinggiHilda NurhelfitrianingsihNo ratings yet
- Catalogo General MAGPOWRDocument16 pagesCatalogo General MAGPOWRananda.slp.admonNo ratings yet
- HIN4801 MODULE OVERVIEWDocument6 pagesHIN4801 MODULE OVERVIEWZukiswa PetseNo ratings yet
- GRC/SPE Workshop: High-Temperature Well Cementing and IntegrityDocument6 pagesGRC/SPE Workshop: High-Temperature Well Cementing and IntegrityesyNo ratings yet
- 10.design 3D Steel Frame ViewDocument21 pages10.design 3D Steel Frame ViewPanha PorNo ratings yet
- Unit 7 VocabularyDocument2 pagesUnit 7 VocabularyNy MenghongNo ratings yet
- Aries Vs Gemini, VirgoDocument2 pagesAries Vs Gemini, VirgoIsabella BalcosNo ratings yet
- Automotive Lighting System SimulatorDocument14 pagesAutomotive Lighting System SimulatorAllan LariosaNo ratings yet
- 3a-Case Study XIX Reliability Analysis of Air Handler UnitsDocument16 pages3a-Case Study XIX Reliability Analysis of Air Handler UnitsMuhammad IqbalNo ratings yet
- Vision IAS Notes List of BookletsDocument1 pageVision IAS Notes List of BookletsBhavya KohliNo ratings yet
- De Thi Thu Vao Lop 10 Mon Tieng Anh Nam Hoc 2016 2017 Phong GD DT Vinh Tuong Vinh Phuc Lan 1Document7 pagesDe Thi Thu Vao Lop 10 Mon Tieng Anh Nam Hoc 2016 2017 Phong GD DT Vinh Tuong Vinh Phuc Lan 1Trà My NgôNo ratings yet
- Nitrogen Blanketing For Storage and TransportationDocument5 pagesNitrogen Blanketing For Storage and TransportationHoang-Vu BuiNo ratings yet
- A Review On Water Management Issues: Potential and Challenges in IndonesiaDocument15 pagesA Review On Water Management Issues: Potential and Challenges in IndonesiajameszulfanNo ratings yet
- Theory of Writing 1Document5 pagesTheory of Writing 1api-611080019No ratings yet
- Presentation On Ar. Sanjay PuriDocument15 pagesPresentation On Ar. Sanjay PuriAAYASHREE SHRESTHANo ratings yet
- Magnetic Particle Test Record Truck Crane Articulating Boom (Gb-La03)Document2 pagesMagnetic Particle Test Record Truck Crane Articulating Boom (Gb-La03)Hario PramuditoNo ratings yet
- Galileo (Satellite Navigation)Document21 pagesGalileo (Satellite Navigation)irayoNo ratings yet
- Introductory Statistics 10th Edition Weiss Test BankDocument36 pagesIntroductory Statistics 10th Edition Weiss Test Bankethelbertsangffz100% (28)
- Berrcom JXB-178 Non-Contact Infrared Digital Thermometer Quick Start GuideDocument1 pageBerrcom JXB-178 Non-Contact Infrared Digital Thermometer Quick Start GuidehhhhNo ratings yet
- Talking About ProfessionsDocument17 pagesTalking About ProfessionsenglishcommunityworkNo ratings yet
- SPECIFICATIONS For Constant Temperature and Humidity ChamberDocument5 pagesSPECIFICATIONS For Constant Temperature and Humidity Chamber彭以和No ratings yet
- Applied SimulationDocument32 pagesApplied SimulationMeşgulRüyalarımıNo ratings yet
- Square PharmaceuticalsDocument2 pagesSquare PharmaceuticalsAl NomanNo ratings yet
- EN 1340:2003/AC: European Standard Norme Européenne Europäische NormDocument14 pagesEN 1340:2003/AC: European Standard Norme Européenne Europäische NormAsmir Softic100% (1)
- Topic For The Class:: Knowledge and ReasoningDocument41 pagesTopic For The Class:: Knowledge and ReasoningVamshidhar ReddyNo ratings yet
- Optimization of Trig Functions Part 2: Periods, Speeds & AnglesDocument5 pagesOptimization of Trig Functions Part 2: Periods, Speeds & AnglesFaye CaiNo ratings yet
- UID 104 Unity CollaborationDocument4 pagesUID 104 Unity CollaborationMary Joyce AvendańoNo ratings yet