Professional Documents
Culture Documents
Theoretical Model of Shield Behavior During Excavation. I Theory
Uploaded by
Dang NhanCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Theoretical Model of Shield Behavior During Excavation. I Theory
Uploaded by
Dang NhanCopyright:
Available Formats
Theoretical Model of Shield Behavior During Excavation.
I: Theory
Mitsutaka Sugimoto1 and Aphichat Sramoon, M.ASCE2
Abstract: Closed-type shield tunneling methods were developed together with computer-aided automatic control systems. However,
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
automatic control systems are based on empirical relationships and do not have a precise theoretical background. In this paper, a model
of the theoretical dynamic load acting on the shield during excavation is developed, taking into account shield tunnel engineering
practices; i.e., the excavated area, the tail clearance, the rotation direction of the cutter face, sliding of the shield, ground loosening at the
shield crown, and the dynamic equilibrium condition. To evaluate the validity of the model qualitatively, the simulation of shield behavior
and the sensitivity analysis of the model parameters on the shield behavior are carried out in both straight and curve alignments for both
sandy and clayey ground. The results for the shield behavior are examined, comparing them with the empirical and the theoretical one, and
it is confirmed that the proposed model represents the shield behavior reasonably well.
DOI: 10.1061/共ASCE兲1090-0241共2002兲128:2共138兲
CE Database keywords: Excavation; Shields; Tunneling; Theories; Simulation.
Introduction Previous Research
Based on shield tunnel engineering practices, the characteristics
Background of shield behavior and the factors affecting the shield behavior are
as follows:
Shield tunneling technologies have been developed for construct-
1. The shield can negotiate a sharp curve by using a copy cutter
ing tunnels in soft ground especially under groundwater. In par- and articulated mechanism 共PWRI 1992兲. The gap between
ticular, the closed-type shield tunneling method has been devel- the excavated area and the shield skin plate, i.e., the ground
oped together with computer-aided automatic control systems. displacement around the shield, thus greatly influences the
However, these systems are based on empirical relationships and shield behavior.
do not have a precise theoretical background. Consequently, the 2. The force due to the wire brush at the shield tail and the
present automatic control systems control the shield according to grease pressure between the wire brushes acts on the shield
a snake-like motion to move it back onto the planned alignment, tail 共Ariizumi et al. 1999兲. Furthermore, the segment is
instead of decreasing the snake-like motion. Therefore it is some- sometimes damaged at a sharp curve, since the inside of the
times difficult to control the shield in a complicated geological shield tail touches the segment. This indicates that the shield
formation and to predict the shield behavior without case records. at the tail receives force from the segment, which is defined
To solve such problems, a theoretical approach that balances the by the tail clearance.
loads acting on the shield, which influence the shield behavior 3. When the jack speed increases, the jack thrust and the cutter
such as the deviation and the rotation of the shield during exca- torque also increase 共e.g., Matsumoto et al. 1989; Marshall
vation, is necessary. et al. 1996兲. The shield behavior is thus a dynamic problem.
4. For the multiface 共MF兲 shield, the yawing of the shield is
changed by selecting the cutter face 共CF兲 rotation direction
共Matsumoto et al. 1989兲, and the rotation direction of the CF
1
Professor, Dept. of Civil Engineering, Nagaoka Univ. of Technology, influences the pitching and yawing of the shield 共Nomoto
1603-1 Kamitomioka, Nagaoka, Niigata 940-2188, Japan. E-mail: et al. 1999兲. These mean that the rotation direction of CF
sugimo@vos.nagaokaut.ac.jp influences the shield behavior, especially the yawing of the
2
Research Associate, Dept. of Civil Engineering, Nagaoka Univ. of shield.
Technology, 1603-1 Kamitomioka, Nagaoka, Niigata 940-2188, Japan. 5. At a sharp curve, the shield axis slightly shifts horizontally
E-mail: aphichat@vos.nagaokaut.ac.jp
from the shield tunnel alignment to the concave side of the
Note. Discussion open until July 1, 2002. Separate discussions must
tunnel 共Tomizawa 1988兲, so the shield axis in a vertical
be submitted for individual papers. To extend the closing date by one
month, a written request must be filed with the ASCE Managing Editor. plane does not coincide with the tunnel alignment 共Mat-
The manuscript for this paper was submitted for review and possible sushita et al. 1994兲. Therefore, the shield slides in the hori-
publication on August 31, 2000; approved on July 24, 2001. This paper is zontal and vertical directions, so the shield axis direction
part of the Journal of Geotechnical and Geoenvironmental Engineer- should be considered to be independent from the tunnel
ing, Vol. 128, No. 2, February 1, 2002. ©ASCE, ISSN 1090-0241/ alignment.
2002/2-138 –155/$8.00⫹$.50 per page. 6. Local collapse of the ground sometimes occurs at the crown
138 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
part of the shield face, especially in sandy ground 共e.g.,
TEPCO 1985; Murayama et al. 1989; Nomoto et al. 1999兲.
Furthermore, overexcavation causes loosening of the ground
around the shield crown and large ground surface settlement
共Hashimoto 1984兲. These also cause the release of earth
pressure acting on the shield.
The model of the load acting on the shield should at least be able
to represent the above-mentioned phenomena.
Shield behavior has been studied by both statistical and theo-
retical methods. The former method is used to predict and control
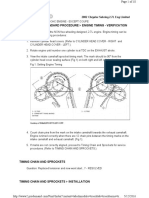
the shield behavior by statistically obtaining the unknown param- Fig. 2. Configuration of load model
eters based on the relationship between the change of shield atti-
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
tude and the jack moment. Szecky 共1966兲 initially proposed an
approximated formula to calculate the jacking thrust based on the above-mentioned shield phenomena, and validated its perfor-
available data. Shimizu and Suzuki 共1992兲 and Shimizu et al. mance through the reverse analysis on the ground properties and
共1992兲 proposed the relationship between the change of shield simulation of shield behavior 共Sugimoto 1994; Sugimoto and
attitude and the jack moment and examined it based on in situ Luong 1996; Sugimoto et al. 1999兲. Extending this model, a
data and measured data of model tests. Sakai and Hoshitani model of the load acting on the shield during excavation, which
共1987; 1993兲 proposed a method to identify the unknown param- can represent all of the above-mentioned shield phenomena, was
eters in the formulation of the Kalman filter technique and exam- developed. Based on the proposed load model, simulation of
ined it based on in situ data. Kuwahara et al. 共1988兲 applied fuzzy shield behavior and sensitivity analysis of the model parameters
theory to control the shield and compared the results with actual on shield behavior in both straight and curve alignments for both
operations by skilled operators. From the viewpoint of engineer- sandy and clayey ground were carried out.
ing practices, these methods are useful, since the shield can be This paper describes in detail the newly developed shield load
controlled by using up-to-date unknown parameters in the formu- model, and shows examples of the shield behavior simulation and
lation based on data measured during excavation. However, these sensitivity analysis results. Furthermore, the validity of the model
methods cannot easily predict the shield behavior without case is discussed qualitatively, and the simulated, empirical, and theo-
records. retical shield behavior are compared.
The latter method is used to predict and control the shield
behavior based on the equilibrium conditions of force and mo-
ment acting on the shield. Akagi and Komiya 共1993兲 proposed a Model of Load Acting on Shield
three-dimensional 共3D兲 finite element 共FE兲 analysis with the ex-
cavating element to simulate the shield advancement and exam- The loads acting on the shield are composed of five forces: force
ined it based on in situ data. Komiya et al. 共1999兲 modified this due to the self-weight of machine f 1 , force on the shield tail f 2 ,
technique for a more robust solution. Takeda et al. 共1998兲 pro- force due to the jack thrust f 3 , force acting at the face f 4 , and
posed a FE analysis with a contact problem and simulated the force acting on the shield periphery f 5 , as illustrated in Fig. 1.
shield behavior by using their technique. Date et al. 共1999兲 pro- Since this load model is a function of the ground properties, the
posed a kinematic model of shield behavior and used it to predict shield behavior, and the shield operations, as shown in Fig. 2, the
the MF shield attitude during excavation. These methods cannot process of solving those parameters provides a reverse analysis of
represent all of the above-mentioned phenomena of the shield. the ground properties, simulation of the shield behavior, and con-
Furthermore, only Takeda’s model takes into account the ground trol of the shield, respectively. The shield operations represent the
displacement around the shield directly, which is considered to be operational control of the shield during excavation such as jack
the predominant factor affecting the shield behavior. thrust, jack moments, and applied pressure in the chamber. The
shield behavior represents the deviations and rotations of the
Objectives shield during excavation. Furthermore, the ground properties rep-
resent the frictional parameters, coefficients of earth pressures,
The authors previously noted that the ground displacement and coefficient of ground reaction, etc.
around the shield should be taken into account in the model of the Here, the following coordinate systems were used to model
load acting on the shield in order to represent the shield behavior each force. The coordinate systems are illustrated in Fig. 3 and
reasonably well 共Sugimoto et al. 1991兲. The authors also devel- their relations are described in Appendix I. The global coordinate
oped a theoretical load model, taking into account some of the
Fig. 1. Load model acting on shield Fig. 3. Coordinate systems used
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 139
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Fig. 5. Forces acting on shield tail due to f 22
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Reaction Force Due to f21
Fig. 4. Forces acting on shield tail due to f 21 If the shield contacts the segment at the ith element, the force
vector due to f 21 F21i can be obtained as
system C T is selected so that the x axis is vertically downwards
and the y and z axes are on a horizontal plane. A machine coor-
dinate system C M is selected so that the p axis is vertically down-
MR
F21i ⫽⌬l 21 冋 F 21i
⫺αtc 共 µtc F 21i ⫹c tc 兲 sign共 CT 兲
⫺ 共 µtc F 21i ⫹c tc 兲
册 (2)
ward without rotation of the shield and the r axis is in the direc-
where ⌬l 21⫽the width of element in the circumferential direc-
tion of the machine axis. The origin of the machine coordinate
tion; CT⫽the cutter torque with a positive sign for counterclock-
system is selected as the center of the section on which the jack
wise rotation of CF 共viewed from shield tail兲; and sign (CT)
thrust acts. In addition to the above two systems, a coordinate
⫽1 for CT⬎0, sign (CT)⫽⫺1 for CT⬍0, and sign (CT)⫽0
system generated by rotating C M about the r axis is also consid-
for CT⫽0.
ered as C M R and its axes are named p R , q R , and r R .
The reaction force on the ith element per unit width F 21i is
The following show each component of force. A force vector F
calculated as
can be transformed to any coordinate expression by transforma-
tion matrices. The moment vector M can be obtained by taking 3U 21i E S I S
the cross product of the position vector r and the force vector. F 21i ⫽⫺ 3 (3)
l 21i
Note that the superscripts T, M, and MR show the coordinate
system used and subscripts 1–5 represent the component of force where
f 1 – f 5 , respectively. U 21i ⫽min共 U 2Ai ,U 2Ci 兲 ⫺t TD ⬍0 (4)
Self Weight of Shield f 1 in which U 21i ⫽the tail clearance at the acting point of F 21i ;
E S I S ⫽the bending stiffness of the shield tail per unit width; l 21i
The self weight of shield W S acts vertically downward in the x ⫽the arm length from the fixed support to the acting point of F 21i
axis direction at the center of gravity r1 . Then the force vector F1 as illustrated in Fig. 4; U 2Ai ⫽the tail clearance at the segment
is defined as end; U 2Ci ⫽tail clearance at the end of the shield tail; and t TD
冋册
WS ⫽the thickness of hardening grouting material inside the shield
tail. The procedures to calculate U 2Ai and U 2Ci are described in
FT1 ⫽ 0 (1) Appendix II.
0
The position vector of the acting point of F21i r21i is defined as
Forces on Shield Tail f 2
When the shield rotates until the shield tail contacts the segment
ring, a reaction force from the segment to the shield is generated.
MR
r21i ⫽ 冋 R SI
0
⫺ 共 l G ⫹l 21i 兲
册 (5)
where R SI ⫽the inner radius of the shield tail; and l G ⫽the length
The postural change of the shield causes deformation of the wire
from the C M origin to the end of the girder.
brush at the shield tail, which generates an unequal pressure act-
ing on the inside of the shield tail. Furthermore, the applied
Reaction Force Due to f22
grease pressure between the individual rows of wire brushes also
The force due to f 22 on the ith element F22i is obtained from
冋 册
generates force on the shield tail. Therefore the force on the shield
tail f 2 is composed of the reaction force on the inner shield sur- σ22i
face from the segment f 21 and the force due the wire brush de- MR
F22i ⫽A 22 ⫺αwc 共 µwc σ22i ⫹c wc 兲 sign共 CT 兲 (6)
formation and the applied grease pressure f 22 . To calculate the ⫺ 共 µwc σ22i ⫹c wc
forces, the following were assumed:
1. The segment is regarded as a rigid body; where A 22⫽the area of the tail element. The pressure acting on
2. The shield tail is regarded as a cantilever beam of which the the inner shield surface due to the deformation of the wire brush
fixed support is at the end of the support girder as illustrated and the grease pressure at the ith tail element σ22i can be found
in Fig. 4; and from
3. The force due to the wire brush deformation has a linear σ22Bi ⫹σ22Ci
relationship with the deformation of the wire brush and is σ22i ⫽ (7)
2
represented by the distribution of pressure on the shield
shown in Fig. 5. σ22ni ⫽k WB 共 t WB ⫺U 2ni 兲 ⫹σgrease 共 n⫽B or C 兲 (8)
140 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
σn f ⫽σCF ⫹σm for clayey ground
(12)
σ⬘n f ⫹σw ⫽σCF ⫹σm for sandy ground
where σn f ⫽the total earth pressure and σ⬘n f ⫽the effective earth
pressure; σw ⫽the hydraulic pressure on CF; σCF ⫽the net pres-
sure acting on CF; and σm ⫽the muck pressure at the face.
Here, note that the following equations are for clayey ground.
In the case of sandy ground, replace σn f with σn⬘ f and add σw to
the normal earth pressure, since the earth and water pressure are
calculated together for clayey ground but are calculated sepa-
rately for sandy ground. To model σn f , the following were as-
sumed:
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 6. Forces acting at face 共clayey ground兲
1. σn f is proportional to the initial normal earth pressure σno .
2. According to previous research, the penetration resistance
and the cutting resistance depend upon the cutting depth t c in
where σ22ni ⫽the pressure at the ith element due to the wire brush Eq. 共13兲 共e.g., Teale 1965; Kurihara 1988; Matsumoto et al.
deformation; k WB ⫽the spring constant of the wire brush; t WB 1989; PWRI 1992兲 or penetration angle θp in Eq. 共14兲 共Hata
⫽the original height of the wire brush; σgrease ⫽the applied 1987兲.
grease pressure between the individual rows of wire brushes; and vs
U 2ni ⫽the tail clearance. The calculation procedure of U 2Bi is tc⫽ (13)
fp
described in Appendix II.
The position vector of the acting point of F22i r22i is repre- vs
θp ⫽ (14)
sented by 2 f r
冋 册
where v s ⫽the advance speed of the shield; f ⫽the rotating
R SI
speed of CF; p⫽the number of paths of the cutter bit; and
MR
r22i ⫽ 0 (9) r⫽the radius of the calculation point on CF. Since p and r
⫺ 共 l T ⫺l 22i 兲 are constant for a machine, σn f /σno is supposed to be a
where l T ⫽the length from the C M origin to the tail end; and function of v s / f r.
l 22i ⫽the distance from the tail end to the acting position of F22i in 3. The state of earth pressure distribution on CF may change
the r axis direction. due to reasons such as local collapse of the ground at the
face. Therefore σn f can be obtained from
Jack Force f 3
vs
σn f ⫽F 共 p,q 兲 a ⫹b σno
fr 冉 (15)冊
The jack thrust acts in the r axis direction on the plane where the where F(p,q)⫽the factor due to the state of earth pressure;
jacks are mounted. The friction on the interface between the jack- and a, b⫽constants. The second term in Eq. 共15兲 is the
ing plate and the segment is also taken into account. Therefore, first-order approximation of the function v s / f r.
the force vector due to the ith jack F3i and its position vector r3i To calculate the force acting on the front and rear of CF, CF is
can be obtained from divided into a finite number of small elements in both radial and
MR
冋 0
⫽A J S i ⫺αsc 共 µsc σJ ⫹c sc 兲 sign共 CT 兲 册 circumferential directions. The force vector due to f 41 at the i jth
element on CF F41i j can be defined as
冋 册
F3i (10)
σJ 0
冋 册
RJ
MR
F41i j ⫽A 41i j 共 µ σ
ms CFi j ⫹τ mi j 兲 sign共 CT 兲 (16)
⫺ 共 σCFi j ⫹σmi j 兲
MR
r3i ⫽ 0 (11)
⫺ 共 l J ⫹l Si 兲 where
where A J ⫽the cross-sectional area of the hydraulic jack; S i mi j ⫽2 关共 1⫺αo 兲共 µms σmi j ⫹c ms 兲 ⫹αo 共 µm σmi j ⫹c m 兲兴 (17)
⫽the status of the ith jack 共S i ⫽1 for the active jack and 0 for the
inactive jack兲; σJ ⫽the applied hydraulic pressure; R J ⫽the radius in which A 41i j ⫽the area of the i jth element on CF; mi j ⫽the
of the jack from the r axis; l J ⫽the length of the jack at zero dynamic friction on both sides of CF due to the mud pressure;
stroke; and l Si ⫽the ith jack stroke. αo ⫽the open ratio of CF; σCFi j can be obtained by substituting
σn f i j and σmi j into Eq. 共12兲; and σmi j is found from
Force at Face f 4 σmi j ⫽σmo ⫹␥ m h mi j (18)
The force at the face can be divided into three components: force where σmo ⫽the muck pressure at the top of the chamber; γm
due to the earth pressure acting on the front and rear of CF f 41 , ⫽the unit weight of muck in the chamber; and h mi j ⫽the vertical
force due to the earth pressure acting on the periphery of CF f 42 , depth of the i jth element measured from the top of the chamber.
and force due to the weight of muck in the chamber f 43 , as Furthermore, v s in Eq. 共15兲 can be obtained from the distance
illustrated in Fig. 6. between the excavation step k⫺1 and k divided by the time in-
terval ⌬t, that is,
Force Acting on Front and Rear of CF f41
兩 r41i j 关 k 兴 ⫺r41i j 关 k⫺1 兴 兩
T T
The balance of the pressure normal to the cutter face produces the v si j 关 k 兴 ⫽ (19)
following conditions: ⌬t 关 k 兴
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 141
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 7. State of earth pressure around shield
where r41i j ⫽the position vector of F41i j and can be written as Fig. 8. Ground reaction curve
MR
r41i j⫽ 冋 册
r CFi j
0
l CF
(20) ground, passive earth pressure is generated. To formulate the
force acting on the shield periphery, the following were assumed:
in which r CFi j ⫽the radius of the i jth element on CF; and l CF 1. The shield is considered as a rigid body.
⫽the distance from the origin of C M to the center of CF. 2. The ground reaction curve, which shows the relationship be-
tween the ground displacement and the earth pressure acting
Force Acting on Periphery of CF f42 on the shield periphery as shown in Fig. 8 共Sramoon and
再
The normal earth pressure acting on the cutting edge σne is as- Sugimoto 1999兲, can be represented by
sumed as the initial normal earth pressure:
σne ⫽σno (21)
共Kio⫺Ki min兲tanh
aiUi
冋
Kio⫺Ki min 册
⫹Kio 共Ui⭐0兲
冋 册
Ki共Ui兲⫽
The force vector due to f 42 on the jth element F42j and its aiUi
共Kio⫺Ki max兲tanh ⫹Kio 共Ui⭓0兲
position vector r42j are defined as Kio⫺Ki max
MR
F42j ⫽A 42j 冋 ⫺σne j
共 µms σne j ⫹c ms 兲 sign共 CT 兲
0
册 (22)
共i⫽v or h 兲
where K⫽the coefficient of earth pressure which is defined
as the earth pressure σ divided by the initial vertical earth
(26)
冋 册
pressure σ0 (K i ⫽σi /σ0 ); U⫽the ground displacement;
R CF
a⫽the gradient of functions K(U), which represents the co-
MR
r42j ⫽ 0 (23) efficient of subgrade reaction k (a i ⫽k i /σ0 ); subscripts
l CF ⫽the vertical and h⫽the horizontal directions, respectively;
where A 42j ⫽the area of the jth element on the cutting edge; and and subscripts o⫽the initial, min⫽the lower limit, and
R CF ⫽the radius of CF. max⫽the upper limit of the coefficient of earth pressure,
respectively.
Force Due to Weight of Muck in Chamber f43 3. The coefficient of earth pressure in any direction K θ can be
The weight of muck in the chamber W m acts on the shield at the interpolated by using K h and K as
centroid of the muck. The force vector due to f 43 F43 and its Kθ共 U n ,θ兲 ⫽K 共 U n 兲 cos2 θ⫹K h 共 U n 兲 sin2 θ (27)
position vector r43 can be found from where U n ⫽the ground displacement normal to the shield
冋 册
periphery; and θ⫽the angle measured from the vertical di-
Wm
rection to U n . The procedure to calculate U n is described in
FT43⫽ 0 (24) Appendix III. K θ(0,θ)σ0 coincide with the horizontal and
0 vertical earth pressures in the segment design criteria 共JSCE
冋册
0 1986兲.
Based on the above assumptions, the force vector due to f 5 on the
M
r43⫽ 0 (25)
i jth element F5i j and its position vector r5i j can be formulated as
冋 册
lm
where l m ⫽the distance from the origin of C M to the centroid of ⫺σnsi j
the chamber.
MR
F5i j ⫽A 5i j
⫺αsg 共 µsg σnsi j ⫹c sg 兲 sign共 CT 兲 (28)
⫺ 共 µsg σnsi j ⫹c sg 兲
Force Acting on Shield Periphery f 5
The snake-like motion of shield movement during excavation is
illustrated in Fig. 7. The active earth pressure occurs when the
MR
r5i j⫽ 冋册
RM
0
r si j
(29)
ground at the open face deforms toward the shield periphery. On where σnsi j ⫽the normal earth pressure acting on the i jth element
the other hand, when some parts of the shield peripheries push the and can be defined as
142 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
σnsi j ⫽K θ共 U ni j ,θi j 兲 σ0i j (30) curve alignment with a radius of 500 m were adopted. Subse-
quently, the shield dimensions, the ground properties, and the
in which A 5i j ⫽the area of the i jth element on the shield periph- shield control conditions were determined, based on empirical
ery; R M ⫽the radius of the machine; and r si j ⫽the i jth element values and engineering practices. Furthermore, the jack force F 3r
position in the r axis direction. and the jack moments M 3p and M 3q were determined by solving
Eq. 共31兲 for F 3r , M 3p , and M 3q in both the straight and curve
Simulation Algorithms alignments for both the sandy and clayey ground, respectively,
under the conditions of Table 1. The predetermined jack forces for
Simulation Technique each case are shown in Table 2.
The shield behavior is represented by the movement of the shield
in the x, y, and z directions 共⌬x, ⌬y, and ⌬z兲, and the shield Calculation Conditions
postures 共yawing angle φy , pitching angle φp , and rolling angle
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
φr 兲. Since the change of φr is limited in practice, the factor of The shield was operated as follows: 共1兲 The shield moved on the
shearing resistance due to the cutter torque αsg was adopted as horizontal and straight alignment for a distance of 10 m; and 共2兲
the parameter instead of φr . The shield behavior during excava- the jack forces in Table 2 were applied and the shield behavior
tion can be obtained by solving the following equilibrium condi- was simulated until the excavation time reached 980 min.
Here the number of elements on CF and on the shield periph-
冋 册
tions of forces and moments:
ery and the time interval of simulation were determined in order
5
to eliminate the influence of the calculation conditions on the
兺 FiM
i⫽1
shield behavior. The following were used: number of radial divi-
5 ⫽0 (31) sions on CF⫽10; number of circumferential divisions on CF
⫽16; number of circumferential divisions on the shield
兺
i⫽1
MiM
periphery⫽16; number of longitudinal divisions on the shield
periphery⫽16; and time interval between two successive steps
⫽10 min.
Index of Shield Behavior
Since a shield performs in three-dimensional space, the shield Simulation Results
behavior has six degrees of freedom, so the traces of shield in the
horizontal and vertical planes, φy , φp , and αsg represent the The shield traces on the vertical plane and on the horizontal plane
shield behavior adequately. Since it is difficult to examine the are shown in Fig. 9, and the indexes of shield behavior during the
simulation process in detail by using the trace of the shield and it simulation are shown in Fig. 10. From Figs. 9 and 10, the follow-
is also impossible to compare the simulation results of ⌬x, ⌬y, ing points were found:
and ⌬z with the observed one, the following normalized param- 1. Figs. 10共a and b兲 show a very similar tendency of shield
eters were adopted to represent the simulation results: 共1兲 the tilt behavior and the shield traces can be summarized as follows:
angle from the shield trace onto the machine axis on the horizon- for the straight alignment, κh ⫽κ ⫽0/m and v s
tal and vertical planes θxT and θyT , which show the sliding of the ⫽0.04 m/min; and for the curve alignment, κh ⫽0.002/m
shield in the horizontal and vertical directions, respectively; 共2兲 ⫽1/500 m, κ ⫽0/m, and v s ⫽0.04 m/min. These obtained
the tunnel alignment parameters, namely the curvature on the values of κh , κ , and v s coincide with the predetermined
horizontal and vertical planes κh and κ , and the velocity of values in Table 1. Furthermore, the shield traces in Fig. 9
shield v s , which represents the shield advancement within two show the same tendency as described above.
successive steps. The indexes of shield behavior are summarized 2. κh is related to θxT for the curve alignment. κh and θxT for
as φy , φp , αsg , θxT , θyT , κh , κ , and v s . Here, it is consid- the curve alignment show large values around 10 m of ad-
ered that the traces of the shield, φy , φp , and αsg show the vance distance and fluctuate up to 15 m. This fluctuation
configuration of the shield behavior, whereas θxT , θyT , κh , κ , occurs up to around 20 m, after which κh and θxT reach the
and v s show the details of the shield behavior. The sign conven- steady state. These results can be explained as follows: 共1兲
tions of θxT , θyT , κh , and κ rely on the right-hand system, i.e., around 10 m, the jack force is suddenly changed from the
the positive sign of θxT , θyT , κh , and κ indicates rotation of the straight alignment condition to the curve alignment condi-
shield to the right, downward, a rightward curve, and a downhill tion; 共2兲 up to 15 m, the shield tail exists inside the exca-
curve, respectively. vated area at the straight alignment; and 共3兲 more than 20 m,
the influence of the change from the straight alignment to the
curve alignment disappears. On the other hand, all of the
Simulation of Shield Behavior indexes of the shield behavior for the straight alignment re-
main constant. This is because the simulation is always in
The simulations of shield behavior were carried out by using the steady state, since the jack force does not change.
artificial data. The basic cases are composed of combinations of 3. θxT is close to zero for the straight alignment, whereas θxT
horizontal tunnel alignment 共straight and curve兲 and soil type ⫽16.30 min for the curve alignment for both ground types.
共sandy ground and clayey ground兲. This section shows the simu- This means that, in the curve alignment, the shield rotates
lation results from the start to the end of simulation, to examine from the tunnel horizontal alignment to the inward curve,
the performance of the model of the load acting on the shield. that is, the shield slides in the transverse direction to satisfy
the equilibrium conditions.
Data Used in Analysis
4. In case of the sandy ground, θyT ⫽0.16 min and φp
At first, the tunnel dimensions were fixed as shown in Table 1. As ⫽0.16 min for the straight alignment, and θyT ⫽0.20 min
for the tunnel horizontal alignment, the straight alignment and the and φp ⫽0.17 min for the curve alignment while they are
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 143
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Table 1. Analysis Conditions
Item Component Value
Tunnel Horizontal curvature κh 共radius兲 for straight alignment 0/m 共⬁ m兲
Horizontal curvature κh 共radius兲 for curve alignment 0.002/m 共500 m兲
Vertical curvature κv 共radius兲 0/m 共⬁ m兲
Overburden depth 20.0 m
Groundwater level at the ground surface
Outer segment radius R C 1.935 m
Length of segment 1.0 m
Shield Outer radius R M 2.0 m
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Total length 5.0 m
Modulus of shield E s 2.04⫻105 MN/m2
Center of erector in C M 共0.0, 0.0, ⫺2.6兲 m
Self-weight W s 1000.0 kN
Center of gravity in C M 共0.0, 0.0, ⫺0.5兲 m
Open ratio of CF αo 20%
Thickness of CF 0.3 m
Radius of chamber 1.95 m
Length of chamber 1.0 m
Radius of CF R CF 2.0 m
Shield tail Inner radius at shield tail R SI 1.96 m
Thickness of shield tail 0.04 m
Thickness of wire brush l WB 0.14 m
Length of wire brush from tail 0.45 m
Spring constant for wire brush k WB 100.0 kN/m3
End of girder from C M origin l G 1.7 m
Shield jack Number of jacks 12
Cross-sectional area A J 314.16 cm2
Radius of jack R J 1.75 m
Length of jack l J 2.0 m
Center of jack from CF 1.4 m
Shield operation Shield excavation velocity v s 0.04 m/min
CF rotation speed f 0.9 rpm
CF rotation direction 共viewed from shield tail兲 Counter-clockwise
Applied pressure in chamber σm 200.0 kN/m2
Muck unit weight in chamber γm 12.0 kN/m3
Applied grease pressure σgrease 560.0 kN/m2
Copy cutter Not used
Ground Total unit weight 20.0 kN/m2
Unit weight of water 10.0 kN/m3
Specific gravity 2.7
Cohesion 0.0 共10.0兲 kN/m2
Internal friction angle 30° 共0°兲
Coeff. of earth pressure K h max , K ho , K h max 0.3, 0.5, 5.0
Coeff. of earth pressure K v min , K v o , K v max 0.3, 1.0, 5.0
Coeff. of ground reaction k h , k v 30.0, 30.0 MN/m3
Earth pressure at face constant a, b 30, 1
Friction Shield tail-Segment c tc (kN/m2 ), µtc , αtc 0.0, 0.3, 0.0
Wire brush-Segment c wc (kN/m2 ), µwc , αwc 0.0, 0.0, 0.0
Jack-Segment c sc (kN/m2 ), µsc , αsc 0.0, 0.0, 0.0
Muck c m (kN/m2 ), µm 0.0, 0.0
Muck-Steel c ms (kN/m2 ), µms 0.0 共10.0兲, 0.1 共0.0兲
Shield-Ground c sg (kN/m2 ), µsg 0.0 共10.0兲, 0.1 共0.0兲
Note: Values are generally specified for sandy ground; and 共 兲 indicates value for clayey ground.
144 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Table 2. Jack Force and Jack Moments for Simulation
Straight alignment Curve alignment
Force
and Sandy Clayey Sandy Clayey
moment ground ground ground ground
F 3r 共kN兲 6386 6492 6442 6492
M 3 p 共kN m兲 63 0 2615 2857
M 3q 共kN m兲 ⫺942 ⫺803 ⫺829 ⫺809
slightly lower for the clayey ground, i.e., θyT ⫽0.09 min and
φp ⫽0.09 min for the straight alignment, and θyT
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
⫽0.11 min and φp ⫽0.09 min for the curve alignment. This
means that the shield axis on both alignments is slightly
downward from the tunnel vertical alignment while the tun-
nel vertical alignment is almost horizontal, that is, the shield
slightly slides in the vertical direction to satisfy the equilib-
rium conditions.
5. In case of the sandy ground, αsg ⫽0.52 for the straight align-
ment and αsg ⫽0.49 for the curved alignment. This means
that about half of the dynamic friction between the skin plate
and the ground in the axial direction is mobilized to resist the
cutter torque. Also the average of the earth pressure acting Fig. 10. Index of shield behavior
on the shield periphery in the curve alignment is slightly
larger than that in the straight alignment. In case of the
clayey ground, αsg is constant for both alignments, i.e., F 4q and the horizontal moment due to f 4 M 4p are generated
αsg ⫽0.27, since the dynamic friction in the clayey ground is due to the rotation of CF. Furthermore, these behaviors co-
independent of the earth pressure. If αsg is larger than 1, the incide with Fig. 10 and 11.
shield is supposed to roll, since the dynamic friction on the 2. In the case of curve alignment, both ground types show very
shield periphery is insufficient to resist the cutter torque. similar normal ground displacement. The passive state of the
Fig. 11 shows the distribution of the normal ground displace- ground is developed drastically at the right spring line of the
ment and the total normal earth pressure around the shield periph- shield near to CF 共at 270°兲 and at the left spring line of
ery for the sandy and clayey ground, where the shield behavior shield around the shield tail 共at 90°兲. Also the active state of
reaches a steady state at the last step of simulation. Table 3 shows the ground appears at the opposite side of the positive
the force and moment components acting on the shield at the ground displacement. These result form the equilibrium con-
same step as Fig. 11. From Fig. 11 and Table 3, the following ditions and are reasonable from the viewpoint of the geom-
were found: etry. These normal ground displacements determine the nor-
1. In case of the straight alignment, the normal ground dis- mal earth pressure on the shield periphery by the ground
placement in the sandy ground is slightly larger than that in reaction curve.
the clayey ground, i.e., the pitching of the shield in the sandy 3. The jack force F 3r , which was determined under the condi-
ground is slightly greater than that in the clayey ground, to tion of v s ⫽0.04 m/min for the curve alignment, is slightly
satisfy the equilibrium conditions. The normal ground dis- larger than that for the straight alignment. This is because, in
placement is almost symmetrical and the ground at the the case of curve alignment, the dynamic friction around the
crown of the shield tail enters the passive state, i.e., the shield periphery in the axial direction is larger, since the
shield axis is slightly downward from the tunnel vertical shield pushes the ground and the ground reaction increases
alignment. These results can be explained as follows: 共1兲 the more, compared with the straight alignment. The horizontal
shield axis almost coincides with the horizontal tunnel align- jack moment M 3p for the curve alignment is larger than that
for the straight alignment. This naturally generates yawing of
ment; and 共2兲 the force due to f 4 in the transverse direction
the shield. The absolute value of the vertical jack moment
兩 M 3q 兩 for the curve alignment is slightly smaller than that for
the straight alignment. This is because, in the case of curve
alignment, the geometric constraint is severe, and therefore
the shield cannot easily rotate downward. The above-
mentioned jack forces are reflected in the force acting on the
shield periphery to satisfy the equilibrium conditions.
Through the above examinations, the proposed load model is con-
sidered to adequately represent the shield behavior at the straight
and curve alignments.
Sensitivity Analysis
The sensitivity analysis was carried out to examine the influence
Fig. 9. Trace of shield
of the model parameters on the shield behavior. Here, the model
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 145
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 11. Normal ground displacement and normal earth pressure around shield periphery
parameters concerned with the forces acting on the shield tail, the f 22 , while other indexes do not change. This means that, in the
earth pressure at the face, the ground reaction curve, the shield case of straight alignment, the shield does not contact the segment
operations, and the copy cutter operations were changed as shown and the tail clearance at the crown is smaller than that at the
in Table 4. The shield behavior at the last step of simulation was invert. On the other hand, in Fig. 13共a兲, only φy and θxT decrease
used to draw the figures, where the shield behavior reaches the slightly in the consideration of f 22 . This means that, in case of the
steady state. The calculation conditions are the same as in the curve alignment, the tail clearance at the concave side is smaller
previous section. The influence of the model parameters on the than that at the convex side, so the wire brush restricts the rotation
shield behavior can be explained as follows. of the shield. These results modify the shield behavior in Fig. 10.
In Fig. 12共b兲, only φp slightly decreases at R SI ⫽1.935 m, i.e.,
the tail clearance⫽0 m. This is because the shield contacts the
segment. On the other hand, compared with Fig. 12共b兲, in Fig.
Parameters of Force on Shield Tail
13共b兲, φy decreases slightly with the decrease of R SI , and φy
By changing the model parameters concerned with the force on suddenly decreases at R SI ⫽1.935 m. These are because the wire
the shield tail, the shield behaviors for the straight and curve brush reduces the rotation of the shield, and the contact of the
alignments are shown in Figs. 12 and 13, respectively. Here, ‘‘F 2 shield with the segment restricts the rotation of the shield signifi-
calculation’’ shows whether the force due to f 21 and f 22 is con- cantly.
sidered. The decrease of inner radius of the shield tail R SI repre- In Fig. 12共c兲, only φp slightly increases with the increase of
sents the decrease of tail clearance due to the hardening grouting k WB . On the other hand, in Fig. 13共c兲, φy and θxT decrease
material inside the tail clearance. withthe increase of k WB . These changes can be explained in a
In Fig. 12共a兲, only φp increases slightly in the consideration of similar manner as the tendency in Figs. 12共a兲 and 13共a兲.
146 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Table 3. Force and Moment Components on Shield
Force and moment components for sandy ground Force and moment components for clayey ground
Case Force Fp Fq Fr Mp Mq Mr Fp Fq Fr Mp Mq Mr
No. type 共kN兲 共kN兲 共kN兲 共kNm兲 共kNm兲 共kNm兲 共kN兲 共kN兲 共kN兲 共kNm兲 共kNm兲 共kNm兲
f1 1000 0 0 0 ⫺500 0 1000 0 0 0 ⫺500 0
f2 0 0 0 0 0 0 0 0 0 0 0 0
f3 0 0 6386 63 ⫺942 0 0 0 6492 0 ⫺803 0
1
f4 67 26 ⫺5445 ⫺36 272 983 34 0 ⫺5864 0 219 343
f5 ⫺1067 ⫺26 ⫺941 ⫺27 1170 ⫺983 ⫺1034 0 ⫺628 0 1084 ⫺343
⌺F 0 0 0 0 0 0 0 0 0 0 0 0
⫺500 ⫺500
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
f1 1000 0 0 0 0 1000 0 0 0 0
f2 0 0 0 0 0 0 0 0 0 0 0 0
f3 0 0 6442 2615 ⫺829 0 0 0 6492 2857 ⫺809 0
2
f4 67 26 ⫺5445 ⫺39 272 983 34 0 ⫺5864 ⫺4 219 343
f5 ⫺1067 ⫺26 ⫺997 ⫺2576 1057 ⫺983 ⫺1034 0 ⫺628 ⫺2853 1090 ⫺343
⌺F 0 0 0 0 0 0 0 0 0 0 0 0
Note: Case No. 1⫽straight alignment; and Case No. 2⫽curve alignment.
Parameters of Force at Face that at the right side. When F(p,q) satisfies Eq. 共32兲 and the
By changing the model parameters concerned with the force at shape of F(p,q) is a trapezoid in the p axis and q axis directions,
the face, the shield behaviors for the straight and curved align- respectively, F(p,q) can be expressed by Eq. 共33兲
冕
ments are shown in Figs. 14 and 15, respectively. The constant a
in Eq. 共15兲 represents the sensitivity of the earth pressure at the F 共 p,q 兲 dA⫽A (32)
face against the shield velocity, i.e., generally a is large for stiff A
再
ground while it is small for soft ground. e p and e q are the acting
f 共 p 兲 ⫽6e p p/R CF ⫹1
point of F(p,q) in Eq. 共15兲 normalized by radius of CF. e p ⬎0 F 共 p,q 兲 ⫽ f q ⫽6e q/R ⫹1 (33)
共 兲 q CF
represents the concentration of the earth pressure at the lower part
of CF due to the loosening of the ground at the face, and e q ⬎0 where A⫽the area of CF.
indicates that the earth pressure at the left side of CF is larger than In Figs. 14共a兲 and 15共a兲, v s sharply decreases with the increase
Table 4. Data Used for Analysis
Set Type Parameter Value Remarks
1 Forces on F 2 cal 0, 1, 2, 3គ 0; No. 1: f 21 , 2: f 22 , 3: f 21⫹ f 22
the shield R SI 1.935, 1.94, 1.95, 1.96 共m兲
tail k WB 10, 50, 100, 250, 500 共kN/m3兲
2 Earth a 10, 20, 30, 40, 50, 100 -
pressure at ep 0.167, 0.083, 0, ⫺0.083, ⫺0.167 f (p)⫽6e p p/R CF ⫹1
the face eq 0.167, 0.083, 0, ⫺0.083, ⫺0.167 f (q)⫽6e q q/R CF ⫹1
3 Ground K ho 0.10, 0.25, 0.50, 0.75, 1.00 -
reaction kh 1, 5, 10, 30, 50, 100 共MN/m3兲
curve kv 1, 5, 10, 30, 50, 100 共MN/m3兲
K h min 0.00, 0.10, 0.20, 0.30, 0.40, 0.49 -
K v min 0.00, 0.20, 0.30, 0.50, 0.80, 0.99 -
K h max 0.51, 2.50, 5.00, 10.00, 15.00 -
K v max 1.1, 2.50, 5.00, 10.00, 15.00 -
4 Operation F 3r 5000, 6000, 7000, 8000, _ a 共kN兲
M 3p 795, 1590, 2650, _ a 共kN m兲 共30%, 60%, 100%, Default兲
M 3q ⫺795, ⫺1590, ⫺2650, _ a 共kN m兲 共30%, 60%, 100%, Default兲
CT ⫺1 , 1 ⫺1: Clockwise, 1: Counterclockwise
Overbreak 0.0, 0.2, 0.5, 1.0, 2.0 共cm兲
5 Copy cutter Position 0, 45, 90, 135, 180, 225, 270, 315 共deg兲
Range 0, 45, 90, 135, 180 共deg兲
Length 0, 2, 4គ , 6, 8, 10 共cm兲
Note: The underlined numbers are the default values.
a
Default value is shown in Table 2.
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 147
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 12. Influence of force on shield tail 共straight alignment兲 Fig. 13. Influence of force on shield tail 共curve alignment兲
of a. This is because v s is determined so as not to change the
other forces, i.e., a v s in Eq. 共15兲 remains constant. In Fig. 15共a兲, left-hand side. Also the gradients of the sensitive parameters in
φy sharply decreases with the increase of a. This is because φy is the sandy ground are smaller than those in the clayey ground.
proportional to v s , since the increase of v s causes the increase of These tendencies can be explained in a manner similar to e p .
the advance length for one step. Therefore the other indexes of the
shield behavior are approximately constant in both alignments.
Parameters of Ground Reaction Curve
The above considerations mean that a large jack force is required
to increase v s in the case of stiff ground. By changing the model parameters concerned with the ground
In Fig. 14共b兲, φp , θyT , and κ increase with the increase of reaction curve, the shield behaviors for the straight and curved
e p . This means that the shield axis and the tunnel vertical align- alignments are shown in Figs. 16 and 17, respectively.
ment turn downward and the shield axis shifts from the tunnel In Fig. 16共a兲, as K ho decreases, v s increases and αsg in the
vertical alignment to the concave side of it, as the acting point of sandy ground also increases. These result from the equilibrium
the earth pressure at the face moves downward. This is because e p conditions, since the decrease of K ho reduces the earth pressure
directly generates M 4q , and M 4q is reflected in M 5q to maintain normal to CF and the friction on the shield periphery in the sandy
balance which causes changing φp . The gradients of the sensitive ground. φp is large at K ho ⫽0.1. This is because the shield goes
parameters in the sandy ground are smaller than those in the downward so as to increase the upward vertical force, since this
clayey ground. This is because: 共1兲 in the case of e p ⬎0, the force around the shield periphery decreases with the decrease of
tunnel vertical alignment turns downward; 共2兲 the shield tail K ho . On the other hand, compared with Fig. 16共a兲, in Fig. 17共a兲,
pushes the ground at the crown, which causes the ground reaction as K ho decreases φy , θxT , and κh increase. This is because the
to increase; 共3兲 the friction at the crown of the shield tail in- shield yaws easily, since the horizontal ground reaction decreases,
creases, since the friction is proportional to the acting earth pres- and φy is proportional to v s , since the total simulation time is
sure in the sandy ground, while it is constant in the clayey constant.
ground; and 共4兲 this friction causes the upward vertical moment. In Figs. 16共b–c兲, the coefficients of ground reaction in the
Fig. 15共b兲 also shows a similar tendency. horizontal and vertical directions k h and k insignificantly influ-
In Figs. 14共c兲 and 15共c兲, φy , θxT , and κh decrease with the ence the shield behavior. This is because the ground reaction is
increase of e q . This means that the shield axis and the tunnel determined by K ho and K o , since the ground displacement is
horizontal alignment turn to the left-hand side and the shield axis close to zero as shown in Fig. 11. On the other hand, in Figs.
shifts from the tunnel horizontal alignment to the concave side of 17共b兲–共c兲, φy , θxT , and κh increase with the decrease of k h and
it, as the acting point of the earth pressure at the face moves to the k . These tendencies can be explained in a manner similar to
148 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 14. Influence of force at face 共straight alignment兲 Fig. 15. Influence of force at face 共curve alignment兲
In Fig. 18共a兲, v s increases with the increase of F 3r . This re-
K ho , in other words, the jack moment in soft ground is more sults from the equilibrium condition of the force in the r axis
effective for rotating the shield than in stiff ground. direction. The gradient of v s in the sandy ground is larger than
In Figs. 16共d–g兲, the minimum coefficients of earth pressure that in the clayey ground. This is because, as shown in Eq. 共15兲,
K h min and K min , and the maximum coefficients of earth pressure the sensitivity of F 3r against v s in the sandy ground is higher than
K h max and K max are less sensitive to the indexes of the shield that in the clayey ground, since the effective earth pressure is
behavior. This is because the coefficients of earth pressure K h and considered in the sandy ground while the total earth pressure is
K determined by the ground reaction curve are within the range considered in the clayey ground. This also causes the increase of
of K h min –Kh max and K min –K max , respectively, since the ground αsg in the sandy ground. On the other hand, in the case of the
displacement is close to zero as shown in Fig. 11. On the other clayey ground, αsg is always constant, since the dynamic friction
hand, in Figs. 17共d–g兲, as K h min K h max and K min K max become does not depend on the normal earth pressure. Furthermore, com-
close to K ho and K o respectively, φy , θxT and κh increase. This pared with Fig. 18共a兲, in Fig. 19共a兲, φy linearly increases with the
is because the shield rotates in a yawing motion easily, since the increase of F 3r . This fact can be explained similarly as a.
coefficient of earth pressure determined by the ground displace- In Fig. 18共b兲, φy , θxT , and κh increase with the increase of
ment becomes close to the lower or upper limit, so the decrement M 3p . This means that the shield axis and the tunnel horizontal
or increment of the ground reaction decreases. alignment turn to the right, and the shield axis shifts from the
tunnel horizontal alignment to the concave side of it. Fig. 19共b兲
also shows a similar tendency.
Parameters of Shield Operation
In Fig. 18共c兲, φp , θyT , and κ increase with the increase of
By changing the model parameters concerned with the shield op- M 3q . This means that the shield axis and the tunnel vertical align-
erations, the shield behaviors for the straight and curve align- ment turn downward and the shield axis shifts from the tunnel
ments are shown in Figs. 18 and 19, respectively. Here, the maxi- vertical alignment to the concave side of it. Fig. 19共c兲 also shows
mum values of the jack moment about the p axis M 3p and about a similar tendency.
the q axis M 3q were determined, supposing 50% of the maximum In Fig. 18共d兲, the CF rotating direction insignificantly influ-
oil pressure of the jack and 75% of the number of jacks. ‘‘CT ences the shield behavior. This is because the force at the face in
direction’’ represents the rotation direction of CF, and ‘‘over- the transverse direction F 4q and the horizontal moment at the face
break’’ represents the overexcavation all round the shield, which M 4p , the sign of which depends on the CF rotating direction, are
is generated by the difference between the radius of CF and the small compared to the other components of force, as shown in
shield radius. Table 3. On the other hand, in Fig. 19共d兲, the CF rotating direc-
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 149
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 16. Influence of ground reaction curve 共straight alignment兲
Fig. 18. Influence of operation parameters 共straight alignment兲
tion slightly influences φp , θyT , and κ in the sandy ground.
This is because the force at the face in the vertical direction F 4p
and the vertical moment at the face M 4q , which are generated by
the dynamic friction on CF, are changed in the sandy ground,
since the speed of shield advance on the right-hand side is slightly
faster than that on the left-hand side.
In Fig. 18共e兲, as the overbreak increases, φp , θyT , and κ
increase, φy , θxT , κh , and αsg in the sandy ground increase,
whereas those in the clayey ground are constant, but v s in both
ground types are almost constant. These tendencies can be ex-
plained as follows: 共1兲 the shield rotates easily, since the ground
reaction is reduced due to the increase of the overbreak; 共2兲 the
dynamic friction around the shield periphery in the sandy ground
decreases with the decrease of the ground reaction; 共3兲 the verti-
cal earth pressure increase, since the shield moves downward
with the increase of the overbreak; 共4兲 the cutter torque in the
sandy ground increases with the increase of the depth of the
shield; 共5兲 the force at the face in the sandy ground produces
unbalanced forces; and 共6兲 αsg and v s are obtained from the
equilibrium conditions. On the other hand, compared with Fig.
18共e兲, in Fig. 19共e兲, as the overbreak increases, φy , θxT , and κh
in the clayey ground increase, whereas the other indexes show a
similar tendency as mentioned above. This is because: 共1兲 the
shield rotates easily, since the ground reaction is reduced due to
the increase of the overbreak; and 共2兲 the horizontal jack moment
M 3p is applied.
The above considerations mean that the overbreak, i.e., the
excavated area, which defines the ground reaction, influences the
Fig. 17. Influence of ground reaction curve 共curve alignment兲
shield behavior more than the jack forces.
150 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 21. Influence of copy cutter used 共straight alignment兲
Fig. 19. Influence of operation parameters 共curve alignment兲
tunnel alignment to the concave side of the tunnel and rotates to
Parameters of Copy Cutter the right according to the curve alignment.
In Fig. 21共a兲, the shield rotates in the direction of the position
By changing the model parameters concerned with the copy cut- of the copy cutter. This is natural, since the ground reaction is
ter, the shield behaviors for the straight and curve alignments are reduced in the area where the copy cutter is used. v s and αsg
shown in Figs. 21 and 22, respectively. The definitions of the increase around the position of the copy cutter at 180°. This is
position, range, and length of the copy cutter are illustrated in Fig. because the ground reaction and the earth pressure at the face
20. Here, note that the shield behavior at the simulation time of decrease, since the shield moves upward. On the other hand, com-
700 min was used, since the shield reaches the ground surface in pared with Fig. 21共a兲, in Fig. 22共a兲, all of the indexes of shield
some simulation cases at the simulation time of 980 min. behavior have their peak around 270° and then decline. This is
In Figs. 21共a–c兲 and 22共a–c兲, φy , θxT , and κh are related to because horizontal jack moment on the right-hand side is applied
each other and φp , θyT , and κ are also related to each other. and the geometric constraint is severe.
This means that the shield axis slightly shifts from the shield In Fig. 21共b兲, as the range of the copy cutter increases, φy ,
θxT , and κh increase, and αsg in the sandy ground also increases.
This is because the ground reaction and the dynamic friction
around the shield periphery in the sandy ground reduce with the
increase of the range of the copy cutter, while the cutter torque
does not change as much. When the range of the copy cutter is
180°, φp , θyT , and κ increase, v s decreases, and the change of
φy , θxT , and κh become small. This is because the shield falls
into the area excavated by the copy cutter and vertical earth pres-
sure increases as the shield goes downward. Fig. 22共b兲 shows a
similar tendency.
In Fig. 21共c兲, as the length of the copy cutter increases, φy ,
θxT , and κh increase. This is because the ground reaction reduces
with the increase of the length of the copy center. αsg in the
sandy ground also increases up to the length of the copy cutter of
2 cm, and after which it remains constant. This is because the
Fig. 20. Definitions of position, range, and length of copy cutter
dynamic friction around the shield periphery in the sandy ground
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 151
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
1. The ground displacement around the shield periphery, which
defines the ground reaction, is the most important factor af-
fecting the shield behavior, especially in stiff ground where
the effect of the jack moment is limited. Furthermore, under
the same shield operation conditions, the ground properties
in the ground reaction curve influence the shield behavior,
especially in the curve alignment where the geometric con-
straint is severe.
2. The tail clearance, especially the contact of the shield with
the segment, influences the shield behavior at the curve
alignment where the distribution of the tail clearance is un-
equal. Furthermore, the decrease of the tail clearance and the
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
increase of the spring constant of the wire brush restrict the
shield rotation.
3. The force due to the jack thrust influences the shield behav-
ior. A large jack force is required to increase s in the case of
stiff ground where the sensitivity of the earth pressure at the
face to the speed of the shield advance is high. The jack
moment is effective for rotating the shield in soft ground
where the ground reaction in the passive state is small.
4. The CF rotating direction influences the shield behavior.
This influence is significant when unsymmetrical earth pres-
sures act on the face.
5. The shield axis direction is related to the tunnel alignment
direction, but the shield axis shifts from the tunnel alignment
to the concave side of the curve alignment. Therefore the
shield axis direction is independent of the tunnel alignment
direction.
6. The acting point of the force on the CF influences the shield
behavior. The acting point changes, for example, in the case
of local collapse of ground at the face.
The authors confirmed that the results agreed well with past ex-
Fig. 22. Influence of copy cutter used 共curve alignment兲 perience and can be explained theoretically. Therefore, the pro-
posed model represents the shield behavior reasonably well pro-
vided appropriate model parameters are used.
reduces with the decrease of the ground reaction while the cutter
torque does not change as much, and the ground reaction at the Acknowledgment
active side becomes constant, since the coefficients of earth pres-
This research was supported by the Program for Promoting Fun-
sure K h and K reach the lower limits K h min and K min . Fig.
damental Transport Technology Research from the Corporation
22共c兲 also shows a similar tendency.
for Advanced Transport & Technology 共CATT兲 of Japan.
The above considerations indicate that: 共1兲 in the straight
alignment where the geometric constraint is loose, the use of the
copy cutter produces shield rotation, even when a small change of Appendix I. Transformation of Coordinates
jack moment is applied; and 共2兲 in the curve alignment where the
geometric constraint is severe, the shield rotates easily by using The coordinate systems C T , C M , and C M R are defined as illus-
the copy cutter, since the concentration of the ground reaction is trated in Fig. 3. C T can be transformed into C M as follows:
reduced. Therefore it is clear that the area where the copy cutter is rM ⫽T⫺1 ⫺1 ⫺1 T
z Ty Tx 共 r ⫺ro 兲
T
(34)
used, i.e., the excavated area, which defines the ground reaction,
greatly influences the shield behavior. where rTo ⫽theorigin of C M , and Tx , Ty , Tz ⫽the transformation
matrixes formed by the rotation angles θx , θy , and θz as defined
in Fig. 23. C M R can be transformed into C M as follows:
Conclusions rM R ⫽TR⫺1 rM (35)
The loads acting on the shield were modeled, based on an analy- where TR ⫽the transformation matrix formed by rotation angle θR
sis of the operation of the tunneling shield. The load model con- as defined in Fig. 3.
sisted of five forces, namely: force due to the self weight of the The yawing angle φy , the pitching angle φp , and the rolling
machine, force on the shield tail, force due to the jack thrust, angle φr , which are measured by an inclinometer in the shield,
force acting at the face, and force acting on the shield periphery. can be converted into θx , θy , and θz as follows:
Based on the proposed load model, the simulation algorithm was θx ⫽φy
再
developed and was used to obtain the shield behavior. Further-
more, the sensitivity of the model parameters to the shield behav- φp 共 measured by torque balanced type兲
θy ⫽ ⫺1
ior was analyzed. From the results, the following were made tan 共 tan φp cos φr 兲 共 measured by gravity type兲
clear: (36)
152 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
from point C on the shield axis with the surface of the segment
r2CS . These position vectors can be defined as
MR
r2C ⫽ 冋 册
R SI
0
⫺l T
(42)
MR
r2CS ⫽ 冋 册
γC R SI
0
⫺l T
(43)
Furthermore, under the condition that r2CS is on the surface of the
segment at ring k⫹1, the position vector at the foot of the per-
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Fig. 23. Definitions of shield rotation angles pendicular from r2CS on the segment axis rC can be represented
by
rCT ⫽rCSE
T
关 k 兴 ⫹βC 共 rCSE 关 k⫹1 兴 ⫺rCSE 关 k 兴 兲
T T
(44)
θz
再
where γC , βC ⫽the multiplier factors (0⭐γC ,0⭐βC ⭐1).
tan⫺1 共 sin φr /cos φp 兲共 measured by torque balanced type兲 Since r2CS ⫺rC is perpendicular to the segment axis, and the
⫽
φr 共 measured by gravity type兲 distance between r2CS and the segment axis is equal to the outer
radius of segment, the following are obtained:
Here, note that φy , φp , and φr are measured at the same time
after the shield rotation, while θx , θy , and θz have the order in ⫺rCT 兲 "kCSE 关 k 兴 ⫽0
T T
共 r2CS (45)
the transformation matrixes.
T
共 r2CS ⫺rCT 兲 "共 r2CS
T
⫺rCT 兲 ⫽R C2 (46)
Solving the above equations for γC and βC , r2CS can be obtained.
Appendix II. Tail Clearance
Then U 2C can be obtained from
Tail Clearance at Segment End U 2C ⫽ 共 r2C
MR
⫺r2CS
MR
兲 pR (47)
The tail clearance at the segment end 共point A in Fig. 4兲 U 2A can
be determined by using the position vector at point A r2A and the Tail Clearance at Front end of Wire Brush
position vector at the intersection of the perpendicular from point
A on the shield axis with the outer end of the segment r2AS . The tail clearance at the front end of the wire brush 共point B in
These position vectors can be defined as Fig. 5兲 U 2B and the position vector at point B r2B can be obtained
冋册
by linear interpolation between points A and C.
R SI
MR
r2A ⫽ 0 (37)
rA Appendix III. Ground Displacement Around Shield
冋 册
Periphery
γA R SI
MR
r2AS ⫽ 0 (38) The i jth position vector on the shield periphery r5i j exists be-
rA tween two successive steps, step k and k⫹1, if
where R SI ⫽the inner radius of shield tail; r A ⫽the foot of a per-
关共 rT5i j ⫺rCF 关 k 兴 兲 "k关 k 兴 兴关共 r5i j ⫺rCF 关 K⫹1 兴 兲 "k关 k⫹1 兴 兴 ⭐0
T T T T T
(48)
pendicular onto the r axis; and γA ⫽the multiplier factor (γA
⭓0). where rCF ⫽the position vector of the center of CF; and k⫽the
Since r2AS is on the plane of the segment end, and the distance direction vector of the shield axis. Then the position vector of the
between r2AS and the center of the segment end is equal to the center of CF rCi j and its rotation angles, where r5i j is on CF, can
outer radius of segment R C , the following are obtained: be obtained by linear interpolation as
MR
共 r2AS ⫺rCSE
MR
兲 •kCSE
MR
⫽0 (39)
j ⫽rCF 关 k 兴 ⫹βi j 共 rCF 关 k⫹1 兴 ⫺rCF 关 k⫹1 兴 兲
T T T T
rCi (49)
MR
共 r2AS ⫺rCSE
MR
兲 • 共 r2AS
MR
⫺rCSE
MR
兲 ⫽R C2 (40) θxi j ⫽θx 关 k 兴 ⫹βi j 共 θx 关 k⫹1 兴 ⫺θx 关 k 兴 兲
where rCSE ⫽the position vector at the center of the segment end; θyi j ⫽θy 关 k 兴 ⫹βi j 共 θy 关 k⫹1 兴 ⫺θy 关 k 兴 兲 (50)
and kCSE ⫽the normal vector of the cross section of the segment
end. Solving the above equations for r A and γA , r2A and r2AS can θzi j ⫽θz 关 k 兴 ⫹βi j 共 θz 关 k⫹1 兴 ⫺θz 关 k 兴 兲
be obtained. Then U 2A can be obtained from
where βi j ⫽the multiplier factor (0⭐βi j ⭐1).
U 2A ⫽ 共 r2A
MR
⫺r2AS
MR
兲 pR (41) Since CF is perpendicular to the shield axis, the following
equation is obtained:
共 rT5i j ⫺rCi j 兲 "kCi j ⫽0
T T
Tail Clearance at Shield Tail (51)
The tail clearance at the end of the shield tail 共point C in Fig. 4兲 Solving the above equations for βi j , rCi j can be obtained. Then
U 2C can be determined by using the position vector at point C r2C the ground displacement vector at the i jth point Ui j can be ob-
and the position vector at the intersection of the perpendicular tained from
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 153
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
l Ci j ⫺l EXi j T tc ⫽ shield tail and segment;
UTi j ⫽ 共 r5i j ⫺rCi
T
j兲 (52) wc ⫽ wire brush and segment;
l Ci j
1 ⫽ self-weight of machine;
where 2 ⫽ force on shield tail;
l Ci j ⫽ 兩 rT5i j ⫺rCi 21 ⫽ contact force between shield and segment ring;
j兩
T
(53)
22 ⫽ interaction force due to deformation of wire brush
l EXi j ⫽ 再 R M ⫹E R 共 R CF ⫺R M 兲
R M ⫹E R l CP关 k 兴 共 θRi j 兲
关 R CF ⭓R M ⫹l CP关 k 兴 共 θRi j 兲兴
关 R CF ⬍R M ⫹l CP关 k 兴 共 θRi j 兲兴 3
4
⫽
⫽
and applied grease pressure;
jack thrust;
force acting at face;
(54)
41 ⫽ force at face;
in which 42 ⫽ force on the cutter face periphery;
冉 ⫺1 T
关 TCi j 共 r5i j ⫺rCi j 兲兴 q
T
冊 43 ⫽ weight of muck in chamber; and
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
θRi j ⫽tan⫺1 ⫺1 T (55) 5 ⫽ force acting on shield periphery.
j 共 r5i j ⫺rCi j 兲兴 p
T
关 TCi
and l EXi j ⫽the effective radius of the excavation; l CP⫽the length
of copy cutter used; E R ⫽the effective ratio of over excavation; References
and TCi j ⫽the transformation matrix at rCi j . Then the normal
ground displacement U ni j can be obtained from Akagi, H., and Komiya, K. 共1993兲. ‘‘Finite element analysis of the stress-
deformation behavior of soil considering the execution procedures
U ni j ⫽ 兩 UTi j 兩 ⫻sign共 l Ci j ⫺l EXi j 兲 (56) during shield work.’’ J. Japan. Soc. Civ. Eng., 481共III-25兲, 59– 68 共in
Japanese兲.
Ariizumi, T., Okadome, K., Igarashi, H., and Nagaya, J. 共1999兲. ‘‘Inves-
tigation of the load acting on shield segment during tunnelling.’’
Notations Proc., Tunn. Eng. 9, 271–276 共in Japanese兲.
The following symbols are used in this paper: Date, K., Igarashi, H., Sasakura, T., and Yakeyama, K. 共1999兲. ‘‘A study
a, b ⫽ constant for earth pressure normal to cutter face; of posture change prediction of multi-shield tunneling machine.’’
c ⫽ mobilized cohesion; Proc., Tunn. Eng., 630共VI-44兲, 39–53 共in Japanese兲.
Hashimoto, S. 共1984兲. ‘‘Results of shield tunnelling in vertical close to
e ⫽ normalized apparent eccentricity;
existing shield tunnels.’’ J. Japan. Soc. Civ. Eng., 352共III-2兲, 1–22 共in
F ⫽ force vector; Japanese兲.
F ⫽ force; Hata, S. 共1987兲. Construction machine engineering, Kajima Press, Tokyo,
K ⫽ coefficient of earth pressure; Japan 共in Japanese兲.
k ⫽ coefficient of subgrade reaction; JSCE. 共1986兲. JSCE, Standard specification of tunnel 共shield driven
k WB ⫽ spring constant of wire brush; method兲 Tokyo, Japan. 共in Japanese兲.
M ⫽ moment vector; Komiya, K., Soga, K., Akagi, H., Hagiwara, T., and Bolton, M. D. 共1999兲.
M ⫽ moment; ‘‘Finite element modelling of excavation and advancement processes
R SI ⫽ inner radius of shield; of a shield tunneling machine.’’ Soils Found., 39共3兲, 37–52.
r ⫽ position vector; Kurihara, K. 共1988兲. Shield driven method for site engineer, Institute of
Science Press, Tokyo, Japan 共in Japanese兲.
v s ⫽ velocity of shield;
Kuwahara, H., Harada, M., Seno, Y., and Takeuchi, M. 共1988兲. ‘‘Appli-
α ⫽ ratio of mobilized shearing resistance due to cutter cation of fuzzy reasoning to the control of shield tunnelling.’’ J.
torque, to friction; Japan. Soc. Civ. Eng., 391共VI-8兲, 169–178 共in Japanese兲.
θxT ⫽ tilt angle from shield trace onto machine axis on Marshall, M. A., Milligan, G. W. E., and Mair, R. J. 共1996兲. ‘‘Movements
horizontal plane; and stress changes in London Clay due to the construction of a pipe
θyT ⫽ tilt angle from shield trace onto machine axis on jack.’’ Proc., Int. Symp. Geotechnical Aspects of Underground Con-
vertical plane; struction in Soft Ground, Balkema, Rotterdam, The Netherlands, 719–
κ ⫽ curvature; 724.
µ ⫽ coefficient of mobilized friction; Matsumoto, Y., Arai, T., and Hatagoshi, A. 共1989兲. ‘‘An experimental
φp ⫽ pitching angle of shield; study of multi-circular face shield tunnelling.’’ J. Japan. Soc. Civ.
Eng., 406共III-11兲, 291–300 共in Japanese兲.
φr ⫽ rolling angle of shield;
Matsushita, Y., Iwasaki, Y., Hashimoto, T., and Imanishi, H. 共1994兲. ‘‘Be-
φy ⫽ yawing angle of shield;
havior of subway tunnel driven by large slurry shield.’’ Proc., Int.
Superscripts Symp. Underground Construction in Soft Ground, Balkema, Rotter-
M ⫽ machine coordinate system 共p, q, r兲; dam, The Netherlands, 253–256.
MR ⫽ rotated coordinate system ( p R ,q R ,r R ); Murayama, S., Suematsu, N., and Kawase, Y. 共1989兲. ‘‘Slip failure along
T ⫽ global coordinate system 共x, y, z兲; the tunnel face driven by shield.’’ J. Japan. Soc. Civ. Eng., 406共III-
Subscripts 11兲, 301–304 共in Japanese兲.
h, ⫽ horizontal and vertical directions; Nomoto, T., Imamura, S., Hagiwara, T., Kusakabe, O., and Fujii, N.
i, j ⫽ ith and jth calculation points; 共1999兲. ‘‘Shield tunnel construction in centrifuge.’’ J. Geotech.
m ⫽ muck; Geoenviron. Eng., 125共4兲, 289–300.
max ⫽ maximum; PWRI 共1992兲. ‘‘Report on design and construction technology of shield
for sharp curve and steep inclined tunnel.’’ PWRI, Tokyo, Japan 共in
min ⫽ minimum;
Japanese兲.
ms ⫽ muck and steel; Sakai, K., and Hoshitani, M. 共1987兲. ‘‘Prediction and control of behaviors
n ⫽ normal direction; on driving shields using Kalman filter theory.’’ J. Japan. Soc. Civ.
o ⫽ origin or initial; Eng., 385共VI-7兲, 69–78 共in Japanese兲.
sc ⫽ shield jack and segment; Sakai, K., and Hoshitani, M. 共1993兲. ‘‘Direction control method of shield
sg ⫽ shield and ground; tunnelling machines and its observed behaviors in some various
154 / JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
ground conditions.’’ J. Japan. Soc. Civ. Eng., 459共I-22兲, 139–148 共in Sugimoto, M., and Luong, N. T. H. 共1996兲. ‘‘Soil properties based on the
Japanese兲. in-situ data of the shield driven method.’’ Proc., Int. Symp. Geotech-
Shimizu, Y., Furukawa, K., Imai, K., and Suzuki, M. 共1992兲. ‘‘Study of nical Aspects of Underground Construction in Soft Ground, Balkema,
the moving characteristics of a shield tunneling machines 共2nd Re- Rotterdam, The Netherlands, 607– 612.
port兲.’’ J. Japan. Soc. Mech. Eng., 58共554兲, 121–128 共in Japanese兲. Sugimoto, M., Yoshiho, N., and Sramoon, A. 共1999兲. ‘‘Study on shield
Shimizu, Y., and Suzuki, M. 共1992兲. ‘‘Study of the moving characteristics behavior by 3-D shield simulator.’’ Proc., Int. Symp. Geotechnical
of a shield tunneling machines.’’ J. Japan. Soc. Mech. Eng., 58共550兲, Aspects of Underground Construction in Soft Ground, Balkema, Rot-
155–161 共in Japanese兲. terdam, The Netherlands, 437– 442.
Sramoon, A., and Sugimoto, M. 共1999兲. ‘‘Development of a ground re- Szechy, K. 共1966兲. The art of tunneling. Akademiai Kiado, Budapest.
action curve for shield tunnelling.’’ Proc., Int. Symp. Geotechnical Takeda, H., Kusabuka, M., Yoshida, T., Tanaka, H., and Kurokawa, N.
Aspects of Underground Construction in Soft Ground, Balkema, Rot- 共1998兲. ‘‘Finite element analysis of general contact problems applica-
terdam, The Netherlands, 437– 442. tion for excavation of shield tunnel.’’ J. Japan. Soc. Civ. Eng., 603共III-
Sugimoto, M. 共1994兲. ‘‘Modeling of loads acting on shield.’’ Proc., Int. 44兲, 1–10 共in Japanese兲.
Teale, R. 共1965兲. ‘‘The concept of specific energy in rock drilling.’’ Int. J.
Downloaded from ascelibrary.org by Florida International University on 09/23/13. Copyright ASCE. For personal use only; all rights reserved.
Symp. Underground Construction in Soft Ground, Balkema, Rotter-
dam, The Netherlands, 273–278. Rock Mech. Min. Sci., 2, 57–73.
Sugimoto, M., Koeta, N., Ramdani, T., Iida, T., and Ooishi, Y. 共1991兲. TEPCO. 共1985兲. ‘‘Report on construction of Keihin-Ushioda electric
‘‘Study on the force at face based on in-situ data.’’ Proc., 46th Annual line.’’ Tokyo Electric Public Company, Tokyo 共in Japanese兲.
Meeting Japan Soc. Civ. Eng., JSCE, No. III-68, 158-159 共in Japa- Tomizawa, A. 共1988兲. ‘‘Shield behavior at the sharp curve alignment.’’
nese兲. Tunn. Undergr., 19共1兲, 31–38 共in Japanese兲.
JOURNAL OF GEOTECHNICAL AND GEOENVIRONMENTAL ENGINEERING / FEBRUARY 2002 / 155
J. Geotech. Geoenviron. Eng. 2002.128:138-155.
You might also like
- Sunday School Lesson Activity 219 Moses Builds A Tablernacle in The Wilderness - Printable 3D Model KitDocument17 pagesSunday School Lesson Activity 219 Moses Builds A Tablernacle in The Wilderness - Printable 3D Model Kitmcontrerasseitz3193No ratings yet
- IJPC 13 4 Hormone Replacement TherapyDocument92 pagesIJPC 13 4 Hormone Replacement TherapyMatiasNo ratings yet
- SRT95 Off-Highway Truck Rear Axle Assembly: Structure and Installation Part 2 Parts Presentation Part 3 MaintenanceDocument29 pagesSRT95 Off-Highway Truck Rear Axle Assembly: Structure and Installation Part 2 Parts Presentation Part 3 MaintenanceoktopusNo ratings yet
- AmboooDocument39 pagesAmboooTesfaye DegefaNo ratings yet
- At-15 Series III 3B6 Operator ManualDocument39 pagesAt-15 Series III 3B6 Operator ManualFausto Herrera B100% (4)
- LFJ All OrdersDocument195 pagesLFJ All Orderskate jackNo ratings yet
- Airport Design GuidelinesDocument408 pagesAirport Design Guidelinesnickolololo67% (9)
- Lucknow Digital Members Directory 4 Jan22Document84 pagesLucknow Digital Members Directory 4 Jan22B2B InfomediaNo ratings yet
- Sample Resume For HRDocument2 pagesSample Resume For HRnapinnvoNo ratings yet
- WDM Technologies: Passive Optical ComponentsFrom EverandWDM Technologies: Passive Optical ComponentsAchyut K. DuttaNo ratings yet
- Uplift Behavior of Screw Anchors in Sand. I. Dry SandDocument21 pagesUplift Behavior of Screw Anchors in Sand. I. Dry Sandahmed sallamNo ratings yet
- O R S L: Nline Eservation and Checking For Availability of Books Ystem at Neu IbraryDocument10 pagesO R S L: Nline Eservation and Checking For Availability of Books Ystem at Neu IbraryBlanche ConstantinoNo ratings yet
- Etsion1999 PDFDocument7 pagesEtsion1999 PDFPoonam GuptaaNo ratings yet
- Study On Buried Depth Protection Index of Submarine CableDocument19 pagesStudy On Buried Depth Protection Index of Submarine CableTrầnHữuHòaNo ratings yet
- Nenadović, A. Tensegrity PDFDocument10 pagesNenadović, A. Tensegrity PDFPatrickNo ratings yet
- A Practical Approach To The Design and Control ofDocument15 pagesA Practical Approach To The Design and Control ofAhmed AllamNo ratings yet
- Hemsas 2009Document27 pagesHemsas 2009belgacemNo ratings yet
- Powder Technology: Y. Rama Murthy, K. Udaya BhaskarDocument12 pagesPowder Technology: Y. Rama Murthy, K. Udaya BhaskarAYDIN KOSENo ratings yet
- Experimental and FE Analysis of Funicular Shells: ISO 9001:2008 CertifiedDocument9 pagesExperimental and FE Analysis of Funicular Shells: ISO 9001:2008 CertifiedVijayNo ratings yet
- Modeling The Performance of Horizontal Anchor Lines During Fall ArrestDocument9 pagesModeling The Performance of Horizontal Anchor Lines During Fall ArrestFLS KARAMNo ratings yet
- Key Techniques in Simulating Comprehensive Anchor Behaviors by Large Deformation Finite Element AnalysisDocument14 pagesKey Techniques in Simulating Comprehensive Anchor Behaviors by Large Deformation Finite Element AnalysisShubhrajit MaitraNo ratings yet
- A New Method For The Design of Laterally Loaded Anchor Piles in Soft Rock 2004 AG ErbrichDocument12 pagesA New Method For The Design of Laterally Loaded Anchor Piles in Soft Rock 2004 AG ErbrichmyplaxisNo ratings yet
- N A RCB S C L: Onlinear Nalysis of EAM Ubject To Yclic Oading by Hyo-Gyoung Kwak and Sun-Pil KimDocument9 pagesN A RCB S C L: Onlinear Nalysis of EAM Ubject To Yclic Oading by Hyo-Gyoung Kwak and Sun-Pil KimSaul Max Huayta AguilarNo ratings yet
- Networks: Neural MaterialsDocument14 pagesNetworks: Neural MaterialsEliseo Hernández DuránNo ratings yet
- Review of metamaterial invisibility cloaks for stealth applicationsDocument16 pagesReview of metamaterial invisibility cloaks for stealth applicationssyed idrisNo ratings yet
- 21-AdvSci SkTextures XChen ArXivRDocument18 pages21-AdvSci SkTextures XChen ArXivRusanjanNo ratings yet
- Performance of Kevlar Fibre-Reinforced Rubber Composite Armour Against Shaped-Charge Jet PenetrationDocument13 pagesPerformance of Kevlar Fibre-Reinforced Rubber Composite Armour Against Shaped-Charge Jet PenetrationYvette OrbánNo ratings yet
- Flight Stability of An Asymmetric Projectile With Activating CanardsDocument8 pagesFlight Stability of An Asymmetric Projectile With Activating Canardsali_raza117No ratings yet
- Pile Behaviour Theory and ApplicationDocument51 pagesPile Behaviour Theory and ApplicationOscarin PerrinNo ratings yet
- Development of A Predictive Model of Fragmentation Using Drilling and Blasting Data in Open Pit MiningDocument8 pagesDevelopment of A Predictive Model of Fragmentation Using Drilling and Blasting Data in Open Pit MiningCristian Rojas OlivaresNo ratings yet
- Ascegm 1943-5622 0002422Document20 pagesAscegm 1943-5622 0002422Chaudary Azhar SaleemNo ratings yet
- 33 Full Paper-WLF3-1176 - Secured Drapery - Rev02 ADocument6 pages33 Full Paper-WLF3-1176 - Secured Drapery - Rev02 Aakhila sNo ratings yet
- Aerodynamic Design Considerations For Tiltrotor Wing Extensions and WingletsDocument12 pagesAerodynamic Design Considerations For Tiltrotor Wing Extensions and WingletsYonghui XUNo ratings yet
- The Mesh Method - in Lightning ProtectionDocument5 pagesThe Mesh Method - in Lightning ProtectionSrëëdhär Sriëë100% (1)
- TMP BBCFDocument9 pagesTMP BBCFFrontiersNo ratings yet
- Categorical Deep Learning- An Algebraic Theory of ArchitecturesDocument29 pagesCategorical Deep Learning- An Algebraic Theory of Architecturestimsmith1081574No ratings yet
- Modeling Masonry In-Filled RC FramesDocument12 pagesModeling Masonry In-Filled RC Framesindrajit sodhaNo ratings yet
- On A Systematic Approach For Cracked Rotating Shaft Study: Breathing Mechanism, Dynamics and InstabilityDocument16 pagesOn A Systematic Approach For Cracked Rotating Shaft Study: Breathing Mechanism, Dynamics and InstabilitySaberElAremNo ratings yet
- 2017-Containment tests and analysis of soft wall casing fabricated by wrapping Kevlar fabric around thin metal ringDocument10 pages2017-Containment tests and analysis of soft wall casing fabricated by wrapping Kevlar fabric around thin metal ringlaokanNo ratings yet
- Blasting Vibration Safety Criterion For A Tunnel Liner StructureDocument7 pagesBlasting Vibration Safety Criterion For A Tunnel Liner StructurepramuktiNo ratings yet
- Scour PaperDocument6 pagesScour Papermohammedasim1999No ratings yet
- Finite Element AnalysisDocument18 pagesFinite Element AnalysisSebin GeorgeNo ratings yet
- Pile behaviour-theory and application: Analysis of factors affecting pile performance predictionsDocument52 pagesPile behaviour-theory and application: Analysis of factors affecting pile performance predictionsSaptarshi NandiNo ratings yet
- Development of Analytical Model of Bending Force During 3-Roller Conical Bending Process and Its Experimental VerificationDocument9 pagesDevelopment of Analytical Model of Bending Force During 3-Roller Conical Bending Process and Its Experimental VerificationAchref Ben MabroukNo ratings yet
- sokolowski2007Document5 pagessokolowski2007Josep Rueda CollellNo ratings yet
- (Asce) 0733-9445 (1998) 124 12 (1375)Document43 pages(Asce) 0733-9445 (1998) 124 12 (1375)sepehrNo ratings yet
- 04 Analysis & Design TTM TH - Khartoum - 2005Document136 pages04 Analysis & Design TTM TH - Khartoum - 2005Aquila1952No ratings yet
- Reliability Analysis of Single Point MooDocument9 pagesReliability Analysis of Single Point Mooxinlin.cppNo ratings yet
- Determination of The Round Length For Tunnel Excavation in Weak RockDocument11 pagesDetermination of The Round Length For Tunnel Excavation in Weak RockcgmgranadaNo ratings yet
- A Novel Variable Topology Design For A Multi Flexible Eje - 2020 - Defence TechnDocument7 pagesA Novel Variable Topology Design For A Multi Flexible Eje - 2020 - Defence Technmatbaila247No ratings yet
- Deep Neural NetworkDocument47 pagesDeep Neural Networkajaytiwari2779No ratings yet
- Fiber Rope Damage Assessment and Acceptance Criteria - New GuidelineDocument7 pagesFiber Rope Damage Assessment and Acceptance Criteria - New GuidelineEric DuarteNo ratings yet
- 6 Evaluation of Theoretical Models To Predict The Pullout AnchorsDocument21 pages6 Evaluation of Theoretical Models To Predict The Pullout AnchorsAna Sofía Arango BermúdezNo ratings yet
- Robotic Explosive Charging in Mining and Construction ApplicationsDocument6 pagesRobotic Explosive Charging in Mining and Construction ApplicationsCeti SacNo ratings yet
- Slug Tracking Simulation of Severe Slugging Experiments: Tor Kindsbekken Kjeldby, Ruud Henkes and Ole Jørgen NydalDocument6 pagesSlug Tracking Simulation of Severe Slugging Experiments: Tor Kindsbekken Kjeldby, Ruud Henkes and Ole Jørgen NydalAyauwu LovedayNo ratings yet
- 1 s2.0 S0267726114001328 MainDocument19 pages1 s2.0 S0267726114001328 Maingopa dasNo ratings yet
- Inverse Analysis Tailored For UHPFRCDocument9 pagesInverse Analysis Tailored For UHPFRCbui huy tangNo ratings yet
- 5.effect of Various Thermal Loadings On Buckling and Vibrational Characteristics of Nonlocal Temperature Dependent FG NanobeamDocument20 pages5.effect of Various Thermal Loadings On Buckling and Vibrational Characteristics of Nonlocal Temperature Dependent FG NanobeamNKTNo ratings yet
- OMAE2012 83166FenderModelling SI ReviewDocument10 pagesOMAE2012 83166FenderModelling SI ReviewAung Soe LynnNo ratings yet
- International Journal of Surface Mining, Reclamation and EnvironmentDocument9 pagesInternational Journal of Surface Mining, Reclamation and EnvironmentZuhaib ShaikhNo ratings yet
- CFD Analysis of Flow Field in Square Cyc PDFDocument9 pagesCFD Analysis of Flow Field in Square Cyc PDFMahesh DasarNo ratings yet
- 1 s2.0 S2095268617300630 MainDocument5 pages1 s2.0 S2095268617300630 MainAzmi MaulanaNo ratings yet
- SPE 26934 Dynamic Modeling of Permeability and Small-Scale Stratigraphy in A Core PlugDocument10 pagesSPE 26934 Dynamic Modeling of Permeability and Small-Scale Stratigraphy in A Core PlugFaisal AzizzNo ratings yet
- Evaluación Sísmica PseudoAdaptiveDocument23 pagesEvaluación Sísmica PseudoAdaptiveRicardo Rey PerezNo ratings yet
- Using An Analytical Model of Simulation in The Design of Light-Weight ArmoursDocument9 pagesUsing An Analytical Model of Simulation in The Design of Light-Weight ArmoursburakNo ratings yet
- 98 - 2001 - Use of Durability Index Tests For The Assessment and Control of Concrete Quality On Site - S M Gouws, M G Alexander and G MaritzDocument13 pages98 - 2001 - Use of Durability Index Tests For The Assessment and Control of Concrete Quality On Site - S M Gouws, M G Alexander and G MaritzBenharzallah KrobbaNo ratings yet
- On A Systematic Approach For Cracked Rotating ShafDocument17 pagesOn A Systematic Approach For Cracked Rotating ShafSaberElAremNo ratings yet
- Experimental Evaluation of Pretopped Precast Diaphragm Critical Flexure Joint Under Seismic DemandsDocument12 pagesExperimental Evaluation of Pretopped Precast Diaphragm Critical Flexure Joint Under Seismic DemandsMarimuthu KaliyamoorthyNo ratings yet
- Optimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsFrom EverandOptimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsNo ratings yet
- Texto en inglesDocument5 pagesTexto en inglesJesus Andres Lopez YañezNo ratings yet
- Quickguide Students For CopyrightsDocument2 pagesQuickguide Students For Copyrightslordvorldomort100% (1)
- Vocabulario Ingles 3 EsoDocument6 pagesVocabulario Ingles 3 EsoPatri ParrasNo ratings yet
- WordPress Introduction: CMS BasicsDocument21 pagesWordPress Introduction: CMS BasicsNgô Ngọc Hải phươngNo ratings yet
- Studentwise Final Placement DetailsLast 3 YearsDocument18 pagesStudentwise Final Placement DetailsLast 3 YearsAmitNo ratings yet
- Apparent Dip PDFDocument2 pagesApparent Dip PDFanon_114803412No ratings yet
- Acoustic Emission InspectionDocument7 pagesAcoustic Emission InspectionAntonio PerezNo ratings yet
- Linkstar RCST Installation Guide: Version DDocument56 pagesLinkstar RCST Installation Guide: Version Djorge_chavez01No ratings yet
- Dispersion of Carbon Nanotubes in Water and Non-Aqueous SolventsDocument41 pagesDispersion of Carbon Nanotubes in Water and Non-Aqueous SolventsSantiago OrtizNo ratings yet
- Radiographic Examination Procedure For Asme CodeDocument33 pagesRadiographic Examination Procedure For Asme CodeEdAlmNo ratings yet
- CSE 323-Final-Summer 2021Document2 pagesCSE 323-Final-Summer 2021nahimur rahmanNo ratings yet
- Jim Dunlop Rotovibe Owners ManualDocument2 pagesJim Dunlop Rotovibe Owners ManualRick RingNo ratings yet
- E VTOLDocument12 pagesE VTOLsaikumar raviNo ratings yet
- Proposal On Online Examination For BE EntranceDocument21 pagesProposal On Online Examination For BE Entrancesubhash22110360% (5)
- Axial Centrifugal FansDocument15 pagesAxial Centrifugal FansAhsan JavedNo ratings yet
- 02+sebring+2.7+timing+chainDocument10 pages02+sebring+2.7+timing+chainMaushil Salman MarkNo ratings yet
- Filed & Entered: SBN 143271 SBN 165797 SBN 259014Document8 pagesFiled & Entered: SBN 143271 SBN 165797 SBN 259014Chapter 11 DocketsNo ratings yet
- Omega 1 Akanksha 9069664Document5 pagesOmega 1 Akanksha 9069664Akanksha SarangiNo ratings yet
- Complete Tds CourseDocument32 pagesComplete Tds CourseAMLANNo ratings yet
- New Age Int. Publication Civil EngineeringDocument28 pagesNew Age Int. Publication Civil EngineeringLove SharmaNo ratings yet
- Sustainability - Research PaperDocument18 pagesSustainability - Research PapermrigssNo ratings yet