You might also like
- Bai Tap Lon RobotDocument23 pagesBai Tap Lon Robotdhvbkhn100% (4)
- Robot Cong NghiepDocument8 pagesRobot Cong Nghiepsegourney7419635.vnNo ratings yet
- 6.3 Feb2020 VIEDocument32 pages6.3 Feb2020 VIEHưng PhátNo ratings yet
- (123doc) - Bai-Tap-Lon-Ky-Thuat-RobotDocument23 pages(123doc) - Bai-Tap-Lon-Ky-Thuat-RobotĐình PhúNo ratings yet
- Các khái niệm cơ bảnDocument15 pagesCác khái niệm cơ bảnNgọc NguyễnNo ratings yet
- Chapter 2-ProblemsDocument9 pagesChapter 2-ProblemsNguyen NhatNo ratings yet
- Ansys Documents PDFDocument325 pagesAnsys Documents PDFBùi Hồng Lệnh0% (1)
- NguyenTatThanh Baocao Tiendo DoanCDTDocument27 pagesNguyenTatThanh Baocao Tiendo DoanCDTNguyễn Văn TàiNo ratings yet
- Bao Cao DKNM FinalDocument22 pagesBao Cao DKNM FinalminhtienNo ratings yet
- Tieu Luan 123Document9 pagesTieu Luan 123Khải Nguyễn CôngNo ratings yet
- Scara 3 bậcDocument27 pagesScara 3 bậcHuy Bùi ĐứcNo ratings yet
- VNTST 2019Document12 pagesVNTST 2019Hiếu TrầnNo ratings yet
- Chương 1 - cơ Học - động HọcDocument50 pagesChương 1 - cơ Học - động Họcthu huyềnNo ratings yet
- Trac Nghiem Hoa Hoc Dai Cuong - Phan Vo Co (Co Dap An)Document27 pagesTrac Nghiem Hoa Hoc Dai Cuong - Phan Vo Co (Co Dap An)nghiaNo ratings yet
- Dieu Khien Dap Ung Quy Dao Cua Robot Di Dong NonholonomicDocument7 pagesDieu Khien Dap Ung Quy Dao Cua Robot Di Dong NonholonomicBinh VuNo ratings yet
- Robot Công Nghiệp Và Cnc Nhóm 29: Tiểu Luận Môn HọcDocument13 pagesRobot Công Nghiệp Và Cnc Nhóm 29: Tiểu Luận Môn HọcPhương Hữu TụNo ratings yet
- Chuyende PTNKso 8Document76 pagesChuyende PTNKso 8quynhviNo ratings yet
- On TapDocument29 pagesOn Tap05-10A10-Thùy DungNo ratings yet
- Vldca1 - Chuong 1Document57 pagesVldca1 - Chuong 1Thiệu Phạm VănNo ratings yet
- Hoa-Dai-Cuong - Nguyen-Son-Bach - Giai-Dap-Bttn-Hdc-Chuong-04 - LKHH - (Cuuduongthancong - Com)Document6 pagesHoa-Dai-Cuong - Nguyen-Son-Bach - Giai-Dap-Bttn-Hdc-Chuong-04 - LKHH - (Cuuduongthancong - Com)selenalily.storeNo ratings yet
- WordbtlDocument37 pagesWordbtlviet.ho1610No ratings yet
- Dinh Luat Ohm PDFDocument29 pagesDinh Luat Ohm PDFnbtt1997No ratings yet
- De Thi HSGQG 2011Document44 pagesDe Thi HSGQG 2011chithanhtranNo ratings yet
- Bài tập các chươngDocument8 pagesBài tập các chươngNhật Lâm Xuân MinhNo ratings yet
- Toán cao cấp 1 1Document137 pagesToán cao cấp 1 1halamadrid1832No ratings yet
- Chuyển động thẳng đều và biến đổi đềuDocument5 pagesChuyển động thẳng đều và biến đổi đềuHoàng MyNo ratings yet
- 44760-Article Text-141527-1-10-20200103Document5 pages44760-Article Text-141527-1-10-202001031066Nguyễn Tấn LongNo ratings yet
- Chương 2: H I Quy BộI Và Đa CộNg TíNhDocument63 pagesChương 2: H I Quy BộI Và Đa CộNg TíNhAnh KimNo ratings yet
- Chuong5-Ly Thuyet Phuc ChatDocument52 pagesChuong5-Ly Thuyet Phuc ChatDavid TayNo ratings yet
- Giao TrinhDocument139 pagesGiao TrinhLê Đình TrọngNo ratings yet
- FILE - 20220517 - 011914 - Bài tập lớn ROBOTIC - 829631Document28 pagesFILE - 20220517 - 011914 - Bài tập lớn ROBOTIC - 829631Tons TooruNo ratings yet
- Mon VL Chat Ran 1Document48 pagesMon VL Chat Ran 1Năng Linh NguyễnNo ratings yet
- Bai Tap Chuong 1Document2 pagesBai Tap Chuong 1Anh Quang NguyenNo ratings yet
- Đề 5-2803Document2 pagesĐề 5-2803Phúc ThịnhNo ratings yet
- Dtcsiia C4Document32 pagesDtcsiia C4Nam Phú NguyễnNo ratings yet
- BT Olympic 10 - 2Document9 pagesBT Olympic 10 - 2Ngoc Tham VoNo ratings yet
- 11 NgoQuiDuongDocument9 pages11 NgoQuiDuong5 GTANo ratings yet
- BT Chuong 1 Chuong 2Document14 pagesBT Chuong 1 Chuong 2thanhtruc02012004No ratings yet
- (123doc) - Tai-Lieu-Cau-Hoi-Trac-Nghiem-Vat-Ly-Dai-Cuong-1-Co-NhietDocument60 pages(123doc) - Tai-Lieu-Cau-Hoi-Trac-Nghiem-Vat-Ly-Dai-Cuong-1-Co-NhietTRANG LE HA THIENNo ratings yet
- De Thi HSG Thai Binh 0809Document2 pagesDe Thi HSG Thai Binh 0809Trần MinhNo ratings yet
- Dethi&DapanOLYMPIC UDTHNLM 2023 E1Document8 pagesDethi&DapanOLYMPIC UDTHNLM 2023 E1Anh VNo ratings yet
- Bai Tap Hoa Ly 2-Dong HocDocument34 pagesBai Tap Hoa Ly 2-Dong HoctrongkimtrnNo ratings yet
- CH8. Chuyen Vi Dam Chiu UonDocument14 pagesCH8. Chuyen Vi Dam Chiu UonMichael LondonNo ratings yet
- BT Anh Xa Tuyen TinhDocument5 pagesBT Anh Xa Tuyen TinhĐại Nghĩa NguyễnNo ratings yet
- Brief 72893 20190102081849 20181123083024-Tuyenchondethituyensinhvaolop10chuyenmonvatliDocument10 pagesBrief 72893 20190102081849 20181123083024-Tuyenchondethituyensinhvaolop10chuyenmonvatliNguyễn Văn LýNo ratings yet
- Dap An Cau Hoi Trac Nghiem Chuong 1Document3 pagesDap An Cau Hoi Trac Nghiem Chuong 1Lương Minh Yến NhiNo ratings yet
- Đề số 2 1Document5 pagesĐề số 2 1Quang DũngNo ratings yet
- Thi KTS CQ 151 Solution Rev1Document8 pagesThi KTS CQ 151 Solution Rev1VỸ TRẦNNo ratings yet
- ÔN TẬP THI GIỮA KÌ LỚP điện 2020Document8 pagesÔN TẬP THI GIỮA KÌ LỚP điện 2020Kiệt NgôNo ratings yet
- bài tập hóa đại cương 2Document19 pagesbài tập hóa đại cương 2Huy Nguyễn NgọcNo ratings yet
- Bai Tap Chuong 2Document3 pagesBai Tap Chuong 2vyanhkhoiNo ratings yet
- Tailieuxanh 8 Chinh Kythuatdieukhien Dientu 6575Document9 pagesTailieuxanh 8 Chinh Kythuatdieukhien Dientu 6575Cường Nguyễn MạnhNo ratings yet
- 013 - Đề HSG Toán 9 - Phú Thọ - 2009-2010Document5 pages013 - Đề HSG Toán 9 - Phú Thọ - 2009-2010Sơn NguyễnNo ratings yet
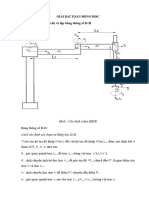
- Giải bài toán động học thuận, động học ngược, động lực họcDocument10 pagesGiải bài toán động học thuận, động học ngược, động lực họcLê Mạnh KhánhNo ratings yet
- Yên Bái 2018Document15 pagesYên Bái 2018Vân Trần ThuNo ratings yet
- TTTDH Cauhoiontap SVDocument4 pagesTTTDH Cauhoiontap SVKhải Nguyễn CôngNo ratings yet
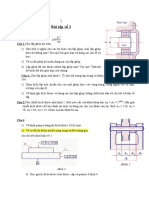
- Bài tập số 2Document2 pagesBài tập số 2Khải Nguyễn CôngNo ratings yet
- Robotics Lê Tuấn AnhDocument40 pagesRobotics Lê Tuấn AnhKhải Nguyễn CôngNo ratings yet
- Chương 8Document25 pagesChương 8Khải Nguyễn CôngNo ratings yet
- Robotic SUDocument48 pagesRobotic SUKhải Nguyễn CôngNo ratings yet
- Tieu Luan 123Document9 pagesTieu Luan 123Khải Nguyễn CôngNo ratings yet