You might also like
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- mrp11 Catalogue PDFDocument3 pagesmrp11 Catalogue PDFab_s5036No ratings yet
- TroubleshootingDocument39 pagesTroubleshootingTrí NguyễnNo ratings yet
- Stamford AVR SX460 PDFDocument4 pagesStamford AVR SX460 PDFNasredine AlainNo ratings yet
- Conversion AVR AS440 A SX440Document4 pagesConversion AVR AS440 A SX440Luis Alberto Lopez100% (2)
- EE 322 TransformersDocument73 pagesEE 322 TransformersCedric BernardNo ratings yet
- 057-004 CAN Guide PDFDocument88 pages057-004 CAN Guide PDFMeriem ZAGRIRI100% (1)
- Mark VIDocument18 pagesMark VIshafqat2008100% (6)
- SX440 Manual enDocument4 pagesSX440 Manual enAnsoriNo ratings yet
- ESD5522E Generator Speed Control UnitDocument2 pagesESD5522E Generator Speed Control UnitKhaled KamelNo ratings yet
- Gac Governör Esd5500e PDFDocument2 pagesGac Governör Esd5500e PDFDr.HlaNo ratings yet
- ESD5200 Series: Speed Control UnitDocument7 pagesESD5200 Series: Speed Control UnitFeri RinaldiNo ratings yet
- Governor Controller (GAC ESD5111) - DatasheetDocument5 pagesGovernor Controller (GAC ESD5111) - Datasheetazhan77No ratings yet
- Technical Selection Guide for Cummins Generator AVRsDocument4 pagesTechnical Selection Guide for Cummins Generator AVRsmohsen_cumminsNo ratings yet
- DVS205 Dual-Variable Sensor: Specification SheetDocument4 pagesDVS205 Dual-Variable Sensor: Specification SheetRachmi KartiniNo ratings yet
- ESD5500E Series Speed Control Unit: SpecificationsDocument4 pagesESD5500E Series Speed Control Unit: SpecificationsAndres LopezNo ratings yet
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- Drive KDM MonoSpace - ComisioningDocument42 pagesDrive KDM MonoSpace - ComisioningȘtefan Cătălin Ciocăzanu100% (1)
- Panasonic Sa-Akx200 Sa-Akx400 SMDocument74 pagesPanasonic Sa-Akx200 Sa-Akx400 SMLilianitaRizo100% (3)
- Eg3002 Manual enDocument8 pagesEg3002 Manual enMahmoud KhattabNo ratings yet
- ESD5100 Series: Speed Control UnitDocument7 pagesESD5100 Series: Speed Control UnitYazan HasanNo ratings yet
- ESD5500E Series Speed Control Unit: SpecificationsDocument5 pagesESD5500E Series Speed Control Unit: SpecificationsMurilo FigueiredoNo ratings yet
- ESD5550 & ESD5570 Series: Speed Control UnitDocument8 pagesESD5550 & ESD5570 Series: Speed Control UnithedayatNo ratings yet
- Pib1002 Esd5500eDocument5 pagesPib1002 Esd5500eAnonymous M0OEZEKoGiNo ratings yet
- Esd5500E Series Speed Control Unit: Model DescriptionDocument23 pagesEsd5500E Series Speed Control Unit: Model DescriptionEslam MahfouzNo ratings yet
- Esd5500 IiDocument8 pagesEsd5500 Iioperaciones1 sesaNo ratings yet
- Performance Input / Output: Impedance Impedance Impedance ImpedanceDocument9 pagesPerformance Input / Output: Impedance Impedance Impedance ImpedanceSalah AhmedNo ratings yet
- Pib1025 Esd1000 1Document5 pagesPib1025 Esd1000 1soliscristopher1310No ratings yet
- Pti1000 D Esd5100 SeriesDocument2 pagesPti1000 D Esd5100 SeriesMaxiSanchezNo ratings yet
- Enhanced Electronic Speed Controller: Gaconfig ToolDocument30 pagesEnhanced Electronic Speed Controller: Gaconfig ToolLuciano PereiraNo ratings yet
- PIB5112 EEG7000 With Interface ToolDocument17 pagesPIB5112 EEG7000 With Interface ToolRogelio Reyes RomeroNo ratings yet
- ESD2200 Series Speed Control Unit: SpecificationsDocument4 pagesESD2200 Series Speed Control Unit: SpecificationsMaxiSanchezNo ratings yet
- Esd5500-II Ban Dich Tv1Document13 pagesEsd5500-II Ban Dich Tv1luanng2301No ratings yet
- Eeg 7500Document32 pagesEeg 7500Jorge Mario Perdomo PerdomoNo ratings yet
- ESD5500-II Fusion Series Speed Control Unit: SpecificationsDocument6 pagesESD5500-II Fusion Series Speed Control Unit: SpecificationsIgor TabulynskyNo ratings yet
- Electronic Digital Governor: Performance EnvironmentalDocument8 pagesElectronic Digital Governor: Performance EnvironmentalMaxDalmiNo ratings yet
- Pib4145 Edg5500 PDFDocument5 pagesPib4145 Edg5500 PDFUNIPOWER2013No ratings yet
- GAC EEG6500 SeriesDocument2 pagesGAC EEG6500 SeriesAlejandro CastagnaNo ratings yet
- Eeg 6500Document14 pagesEeg 6500Jorge Mario Perdomo PerdomoNo ratings yet
- LSM200 Series: Load Sharing ModulesDocument11 pagesLSM200 Series: Load Sharing ModulesHernando luis Fang pedrozaNo ratings yet
- BLDC-5015 SeriesDocument2 pagesBLDC-5015 Series작은기니피그No ratings yet
- BLDC-5015 SeriesDocument2 pagesBLDC-5015 SeriesJoacoHerSeNo ratings yet
- FIO OverviewDocument42 pagesFIO OverviewNirmal K100% (1)
- Ingedrive Lv200 EngDocument2 pagesIngedrive Lv200 EnginakigarateNo ratings yet
- HWS 300 - 1500Document2 pagesHWS 300 - 1500Dedi BarkahNo ratings yet
- EarthWatts 650 FlyerDocument1 pageEarthWatts 650 FlyertankiemNo ratings yet
- Emerson Chloride Exond ApodysDocument4 pagesEmerson Chloride Exond Apodystimentitaek.mhdNo ratings yet
- Datasheet 2MWDocument1 pageDatasheet 2MWRaghavaNo ratings yet
- Edg 5500Document2 pagesEdg 5500AlexanderNo ratings yet
- Sx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsDocument4 pagesSx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsJose PirulliNo ratings yet
- Pib2045 Add103 PDFDocument2 pagesPib2045 Add103 PDFUNIPOWER2013No ratings yet
- ENO-1612 ENO 1612: - Power The World With Highest EfficiencyDocument2 pagesENO-1612 ENO 1612: - Power The World With Highest Efficiencyrobsontecladista4164No ratings yet
- Kirloskar: Diesel Generating Sets KG1010W / KG1010WSDocument5 pagesKirloskar: Diesel Generating Sets KG1010W / KG1010WSnam phạm0% (1)
- LG EAY62171601 EAX63729001 LGP4247-11SPL InfoDocument11 pagesLG EAY62171601 EAX63729001 LGP4247-11SPL InfoAnonymous zGz5DRmTNo ratings yet
- I Pues D 1000 Series Data SheetDocument3 pagesI Pues D 1000 Series Data Sheetkhaled kamelNo ratings yet
- New Specification Sheet - 250kVA Kirloskar Green GeneratorDocument4 pagesNew Specification Sheet - 250kVA Kirloskar Green GeneratorGaurav GNo ratings yet
- 1ACOS - S Ima Da Se Nadju 1wDocument4 pages1ACOS - S Ima Da Se Nadju 1wMilan ĐorđevicNo ratings yet
- 2A 27V Step-Down DC To DC Converter: Description FeaturesDocument10 pages2A 27V Step-Down DC To DC Converter: Description FeaturesDwiAGUNG Management 2No ratings yet
- 7SG117 Argus 7: Answers For EnergyDocument10 pages7SG117 Argus 7: Answers For EnergygovindarulNo ratings yet
- High voltage contactors for rail vehicle applications up to 4 kVDocument9 pagesHigh voltage contactors for rail vehicle applications up to 4 kVFeri RinaldiNo ratings yet
- Advance Xitanium 40W Linear LED Driver With ComfortFade and Auxiliary Output Datasheet XI040C110V054PST2 (PAd-19090DS) PDFDocument9 pagesAdvance Xitanium 40W Linear LED Driver With ComfortFade and Auxiliary Output Datasheet XI040C110V054PST2 (PAd-19090DS) PDFLuis Alberto BelmonteNo ratings yet
- Hydro Stator End Winding Accelerometer System: Bently Nevada™ Asset Condition MonitoringDocument11 pagesHydro Stator End Winding Accelerometer System: Bently Nevada™ Asset Condition MonitoringasprillaNo ratings yet
- Ngine Overning Ystems: Generator Frequency Sensing Speed Control UnitDocument6 pagesNgine Overning Ystems: Generator Frequency Sensing Speed Control Unitjuan narvaezNo ratings yet
- Avc63 12 PDFDocument4 pagesAvc63 12 PDFZinou ZizouNo ratings yet
- SM1800 GBDocument4 pagesSM1800 GBAristides AnselmoNo ratings yet
- ESD5100 SeriesDocument5 pagesESD5100 SeriesCarlos AguiarNo ratings yet
- Kirloskar Diesel Generators Offer Reliable Power, Low CostsDocument4 pagesKirloskar Diesel Generators Offer Reliable Power, Low Costsnam phạmNo ratings yet
- Manual Digitrip 310Document12 pagesManual Digitrip 310Carlos RiveraNo ratings yet
- Legacy To Industry 40 A Profibus SnifferDocument7 pagesLegacy To Industry 40 A Profibus SnifferCarlos RiveraNo ratings yet
- Smart Genhgm6100uDocument32 pagesSmart Genhgm6100uChristian AgudeloNo ratings yet
- ATS-22 Automatic Transfer Switch Control Unit ManualDocument45 pagesATS-22 Automatic Transfer Switch Control Unit ManualAndrés ArrietaNo ratings yet
- Event Monitor Introduction BrochureDocument6 pagesEvent Monitor Introduction BrochureCarlos RiveraNo ratings yet
- ATQMS-MKTG-DOC - Adroit SCADA IntelligenceDocument4 pagesATQMS-MKTG-DOC - Adroit SCADA IntelligenceCarlos RiveraNo ratings yet
- Digital Output to Input GuideDocument2 pagesDigital Output to Input GuideRicardo aguilarNo ratings yet
- LTC Batteries: Size: 1/2AADocument1 pageLTC Batteries: Size: 1/2AACarlos RiveraNo ratings yet
- DSE61xx Configuration Suite Software Manual PDFDocument60 pagesDSE61xx Configuration Suite Software Manual PDFluisNo ratings yet
- SR4A, SR6A, SR8A, SR9A, SR32A Static Voltage Regulators: FeaturesDocument4 pagesSR4A, SR6A, SR8A, SR9A, SR32A Static Voltage Regulators: FeaturesCarlos RiveraNo ratings yet
- 056-096 Engine Speed ControlDocument2 pages056-096 Engine Speed ControlRicardo Nunes Pereira JuniorNo ratings yet
- NBR 16274 - Sistemas Fotovoltaicos Conectados A RedeDocument2 pagesNBR 16274 - Sistemas Fotovoltaicos Conectados A RedeAlexandre DiasNo ratings yet
- 10 Edl 240 PL 03 3 PDFDocument20 pages10 Edl 240 PL 03 3 PDFCarlos RiveraNo ratings yet
- D20-D200 Gea12807aDocument16 pagesD20-D200 Gea12807aCarlos RiveraNo ratings yet
- PV3300 TLV Series (1KW-6KW) : SpecificationDocument1 pagePV3300 TLV Series (1KW-6KW) : SpecificationFrancescoNo ratings yet
- Disconnectors Southern States VeeDocument2 pagesDisconnectors Southern States VeejuliancansenNo ratings yet
- Dual 16-Bit DAC Economy IC Data SheetDocument13 pagesDual 16-Bit DAC Economy IC Data SheetUsval AnNo ratings yet
- Operating Instructions Cond Portable F3 ENDocument28 pagesOperating Instructions Cond Portable F3 ENDao Quang AiNo ratings yet
- Porsche EIP InstructionDocument6 pagesPorsche EIP Instructioncaragan1970No ratings yet
- JBL MP415 technical manual specificationsDocument2 pagesJBL MP415 technical manual specificationsYeison InfanteNo ratings yet
- Typical Load ComputationDocument5 pagesTypical Load ComputationMay Angela LacuestaNo ratings yet
- Harmony XB7 - XB7EV03BPDocument8 pagesHarmony XB7 - XB7EV03BPvikrantNo ratings yet
- Sol-Lx-W, Sol-Lx-C, Rolp-Lx, Rolp Sounder, Beacon, and Sounder-Beacon Alarm DevicesDocument6 pagesSol-Lx-W, Sol-Lx-C, Rolp-Lx, Rolp Sounder, Beacon, and Sounder-Beacon Alarm DevicesMazenabs AbsNo ratings yet
- Aoz1360 A&oDocument12 pagesAoz1360 A&oAnthony SaltNo ratings yet
- Transmission Media Characteristics and FactorsDocument39 pagesTransmission Media Characteristics and FactorsGolam Mehbub SifatNo ratings yet
- Lowongan PT Multi Spunindo Jaya Sept 2020Document5 pagesLowongan PT Multi Spunindo Jaya Sept 2020Ika DiagaNo ratings yet
- Impulse Generator & Lightning Characteristics Simulation Using PSpiceDocument6 pagesImpulse Generator & Lightning Characteristics Simulation Using PSpiceYuxin ZhangNo ratings yet
- Bachelors of Engineering: (Study and Simulation of Substation and Its Components)Document29 pagesBachelors of Engineering: (Study and Simulation of Substation and Its Components)15-Sumit DingankarNo ratings yet
- PDS7114 Iss5 ESB OFFSHORE BATTERYDocument7 pagesPDS7114 Iss5 ESB OFFSHORE BATTERYSonthi MooljindaNo ratings yet
- Antenna Fundamentals (3) : R. StruzakDocument32 pagesAntenna Fundamentals (3) : R. StruzakAli RehmanNo ratings yet
- Hgd-113, Hgd-133 For CeDocument55 pagesHgd-113, Hgd-133 For CeRays RwpNo ratings yet
- Ied Basic Troubleshooting GuidelinesDocument8 pagesIed Basic Troubleshooting GuidelinesAkshay KaushikNo ratings yet
- 4 Electromagnetism: Practice 4.1 (p.166)Document12 pages4 Electromagnetism: Practice 4.1 (p.166)Natalie ShumNo ratings yet
- P301101a APP AVC Semiconductor FABDocument4 pagesP301101a APP AVC Semiconductor FABanksyeteNo ratings yet
- Sennheiser RS 195 Digital Wireless TV Listening System Instructions Manual ENDocument39 pagesSennheiser RS 195 Digital Wireless TV Listening System Instructions Manual ENRichard RoperNo ratings yet
- Vma419 A4v02Document11 pagesVma419 A4v02Pepito PerezNo ratings yet
- nanoHUB U Lundstrom Nanotransistors L2.7Document24 pagesnanoHUB U Lundstrom Nanotransistors L2.7Iqra FarhanNo ratings yet
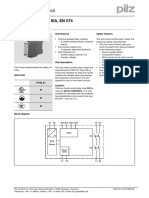
- P1HZ X1 enDocument6 pagesP1HZ X1 enDiiani AmayaNo ratings yet
- cs224r Practical Deep RLDocument77 pagescs224r Practical Deep RLmichael AmponsahNo ratings yet
- 1) To Configure Digital Input and Output Pin of The Arduino Board. 2) To Create Program That Allows The User To Input Binary ValueDocument8 pages1) To Configure Digital Input and Output Pin of The Arduino Board. 2) To Create Program That Allows The User To Input Binary ValueChrissie Jean TorresNo ratings yet
- Introduction To Integrated Circuit Fabrication: ObjectivesDocument35 pagesIntroduction To Integrated Circuit Fabrication: Objectives陳傳中No ratings yet