You might also like
- Great Critical Thinking Puzzles PDFDocument96 pagesGreat Critical Thinking Puzzles PDFCarlos Joaquín Duarte80% (5)
- Calculus 2 Midterm Quiz 2 Attemp 1Document7 pagesCalculus 2 Midterm Quiz 2 Attemp 1Russel MendozaNo ratings yet
- Canam Purlins and Girts Catalogue CanadaDocument0 pagesCanam Purlins and Girts Catalogue CanadasaivanvalendezNo ratings yet
- Space Gamer 06 PDFDocument16 pagesSpace Gamer 06 PDFDougNew100% (1)
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
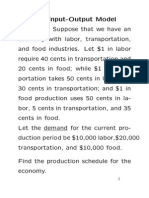
- Leontief 1Document24 pagesLeontief 1Tara BhusalNo ratings yet
- Problem 1: (35 Points) Consider The Following Pyramid Shaped Solid Object and The 3 Frames ADocument10 pagesProblem 1: (35 Points) Consider The Following Pyramid Shaped Solid Object and The 3 Frames AAbdul Samad100% (1)
- Compressed Air System in Thermal Power PlantDocument12 pagesCompressed Air System in Thermal Power PlantAshwani Dogra100% (4)
- Mla 2Document374 pagesMla 2Mohsin MurtazaNo ratings yet
- Cuaderno Curso - CAT I Activity Book Spanish With CoverDocument34 pagesCuaderno Curso - CAT I Activity Book Spanish With CoverJose Raul Reyes Dominguez100% (1)
- Chem 31 AtqE1Document3 pagesChem 31 AtqE1Anonymous GO6JVW9WudNo ratings yet
- Paso 1: X y X y X Nudo 01 Nudo2Document25 pagesPaso 1: X y X y X Nudo 01 Nudo2Czar PajaresNo ratings yet
- Tarea 1.5Document1 pageTarea 1.5Katherine ArocaNo ratings yet
- Robotics Assignment TwoDocument19 pagesRobotics Assignment Twomisgana etichaNo ratings yet
- PMT3114 Assignment No.2Document7 pagesPMT3114 Assignment No.2Hussam Eldein EltayebNo ratings yet
- Transformation ProblemsDocument18 pagesTransformation Problemsrajya lakshmiNo ratings yet
- Tarea 1.4Document1 pageTarea 1.4Katherine ArocaNo ratings yet
- Faculty of Bachelor of Management With HonoursDocument17 pagesFaculty of Bachelor of Management With HonoursASHWIN 2629No ratings yet
- Problema 6 PorticosDocument72 pagesProblema 6 PorticosLuis Urpeque GuadalupeNo ratings yet
- Problema 6 PorticosDocument72 pagesProblema 6 PorticosLuis Urpeque GuadalupeNo ratings yet
- Problema 6 PorticosDocument72 pagesProblema 6 PorticosLuis Urpeque GuadalupeNo ratings yet
- ExamsDocument17 pagesExamssteijnNo ratings yet
- ECE4500-5500 - W18 - HW-1 - SolutionDocument10 pagesECE4500-5500 - W18 - HW-1 - SolutionAbdul SamadNo ratings yet
- Ejercicios Analisis Matricial de Armaduras - A2Document41 pagesEjercicios Analisis Matricial de Armaduras - A2JOHN ARTHUR CULQUICONDOR MONDRAGONNo ratings yet
- SolutionDocument8 pagesSolutionAbdallah GhanemNo ratings yet
- Physics 1 Wk2 Motion in Straight Line (P Vs T, V Vs T, A Vs T)Document61 pagesPhysics 1 Wk2 Motion in Straight Line (P Vs T, V Vs T, A Vs T)Cheena Francesca LucianoNo ratings yet
- Tenemos Una Fuerza RedundanteDocument10 pagesTenemos Una Fuerza RedundanteMarcos OchoaNo ratings yet
- KUIS - Asep Oki SaputraDocument19 pagesKUIS - Asep Oki SaputraGhina Pricillia DarmansyahNo ratings yet
- Jan 2015 - Mock Paper - Solution Q3-5Document5 pagesJan 2015 - Mock Paper - Solution Q3-5jimmychillsNo ratings yet
- Assign2-110026771 Jain Manan HemantDocument8 pagesAssign2-110026771 Jain Manan Hemantmanan jainNo ratings yet
- Lab 3 - Inverse and Forward KinematicsDocument9 pagesLab 3 - Inverse and Forward KinematicsRafael MarcondesNo ratings yet
- Tarea5 Garcia VelazquezDocument3 pagesTarea5 Garcia VelazquezChrisNo ratings yet
- QMP 2020 21 - Solutions PDFDocument4 pagesQMP 2020 21 - Solutions PDFMohamed MohamudNo ratings yet
- REG NO: 15BEE0305 Name: Madhankumar.S Sub: Robotics and Control Slot: A1Document8 pagesREG NO: 15BEE0305 Name: Madhankumar.S Sub: Robotics and Control Slot: A1Madhan kumarNo ratings yet
- Cacho 0565Document120 pagesCacho 0565Eduardo Cacho CorreaNo ratings yet
- Robotics Assignment TwoDocument19 pagesRobotics Assignment Twomisgana etichaNo ratings yet
- HW 2 CHAP 2 - YepezDocument9 pagesHW 2 CHAP 2 - YepezElviraNo ratings yet
- 2 Filters17Document58 pages2 Filters17hakanNo ratings yet
- Trigonometrice QuationsDocument13 pagesTrigonometrice QuationskhanalirezarazNo ratings yet
- Copia de E.DESARROLLADOS-2015Document17 pagesCopia de E.DESARROLLADOS-2015CRISTIAN JOEL SANTISTEBAN CHAPOÑANNo ratings yet
- Ejercicio de Velocidades y Aceleraciones Con Movimiento Plano (Análisis Vectorial)Document3 pagesEjercicio de Velocidades y Aceleraciones Con Movimiento Plano (Análisis Vectorial)HidulisBenítezMillánNo ratings yet
- Elemen HinggaDocument1 pageElemen Hinggamalau WinarkoNo ratings yet
- Assign3-110036411 Agrawal Dhruv HemantDocument7 pagesAssign3-110036411 Agrawal Dhruv Hemantmanan jainNo ratings yet
- L 04 ExampleDocument20 pagesL 04 ExampleIshit BalarNo ratings yet
- PR4 - Sol - 2019-Ii AlgDocument2 pagesPR4 - Sol - 2019-Ii AlgmarciNo ratings yet
- Kelompok 6 - Interior PointDocument20 pagesKelompok 6 - Interior Pointilham ali akbarNo ratings yet
- Portico ADocument45 pagesPortico AJessica Toribio AriasNo ratings yet
- CDI15-04 - Arithmetic CodingDocument17 pagesCDI15-04 - Arithmetic CodingperhackerNo ratings yet
- Trigonometric Equations: mc-TY-trigeqn-2009-1Document13 pagesTrigonometric Equations: mc-TY-trigeqn-2009-1EloiseCalaisNo ratings yet
- Robótica de Manipuladores: ProblemsDocument6 pagesRobótica de Manipuladores: ProblemsAldo ParedesNo ratings yet
- Dhama Lisayanti - 1710503013 - AS3 - Quiz - TS-03Document8 pagesDhama Lisayanti - 1710503013 - AS3 - Quiz - TS-03dhama lisayantiNo ratings yet
- An StrukDocument7 pagesAn StrukSriharsimi UsmanNo ratings yet
- Tugas Seblum UtsDocument14 pagesTugas Seblum UtsWahyu FeronikaNo ratings yet
- W6-PlaneStress1-Stiffness Matrix-210925-FDocument49 pagesW6-PlaneStress1-Stiffness Matrix-210925-FHappy ShintaNo ratings yet
- Computer Graphics Using Opengl - Hill/Kelley 3 EditionDocument14 pagesComputer Graphics Using Opengl - Hill/Kelley 3 Editionlmelhem33% (3)
- BioMEMS Sheet2 ADocument7 pagesBioMEMS Sheet2 Atracywst0123No ratings yet
- CG Assignment 2 Sayan Maiti CSE/17/18Document3 pagesCG Assignment 2 Sayan Maiti CSE/17/18SayanMaitiNo ratings yet
- CG Assignment 2 Sayan Maiti CSE/17/18Document3 pagesCG Assignment 2 Sayan Maiti CSE/17/18SayanMaitiNo ratings yet
- Problema 2Document34 pagesProblema 2Carlos Alexander Chicoma AgurtoNo ratings yet
- Answers - Worksheet 1Document3 pagesAnswers - Worksheet 1Shiyang CaiNo ratings yet
- Solutions To Physics I C 2d Forces Practice TestDocument5 pagesSolutions To Physics I C 2d Forces Practice TestCyr rileroNo ratings yet
- Nama: Fransiskus Giling NIM: 2010212397: Metode Pendekatan BerurutanDocument4 pagesNama: Fransiskus Giling NIM: 2010212397: Metode Pendekatan BerurutanDinda Sari BintangNo ratings yet
- Discrete Time ConvolutionDocument21 pagesDiscrete Time ConvolutionATHAR IQBALNo ratings yet
- Anisotropic BehaviorDocument12 pagesAnisotropic BehaviorNaga Manikanta TatikondaNo ratings yet
- Lecture-8 Screw TransformationsDocument17 pagesLecture-8 Screw TransformationsKrishna KulkarniNo ratings yet
- Apparatus and MethodDocument10 pagesApparatus and MethodAli JafariNo ratings yet
- Experiment-2: Shear Centre of Open SectionsDocument7 pagesExperiment-2: Shear Centre of Open SectionsRahul RoyNo ratings yet
- Dynamical Systems: Laurette TUCKERMAN Laurette@Document23 pagesDynamical Systems: Laurette TUCKERMAN Laurette@sevkaxNo ratings yet
- 6th Grade Math - Covering and Surrounding Unit PlanDocument7 pages6th Grade Math - Covering and Surrounding Unit PlanBecky JohnsonNo ratings yet
- To C Paper Pba 11552Document8 pagesTo C Paper Pba 11552Mubarak PatelNo ratings yet
- New Microsoft Office Word DocumentDocument6 pagesNew Microsoft Office Word DocumenthelenarajNo ratings yet
- 20SQGD070 Spec SheetDocument5 pages20SQGD070 Spec Sheetsametb_1No ratings yet
- GWW ExamplesDocument23 pagesGWW ExamplesSuthan PooranampillaiNo ratings yet
- Boarding Pass 5 PromoDocument28 pagesBoarding Pass 5 PromoLorene RgNo ratings yet
- Template Jurnal Bina TambangDocument3 pagesTemplate Jurnal Bina TambangNoviaAfrizalNo ratings yet
- The Graph of A Quadratic FunctionDocument30 pagesThe Graph of A Quadratic FunctionIr HeriawanNo ratings yet
- Kinetic Theory of Gases and RadiationsDocument19 pagesKinetic Theory of Gases and RadiationsGajanan ThosareNo ratings yet
- J. Biol. Chem.-2008-Sancar-32153-7Document7 pagesJ. Biol. Chem.-2008-Sancar-32153-7Deasy Ovi HarsachatriNo ratings yet
- ScalingDocument32 pagesScalingNK NKNo ratings yet
- JTeC Template v2Document5 pagesJTeC Template v2Aizat FitriNo ratings yet
- Home Work Assignment 2Document3 pagesHome Work Assignment 2Agnivesh SharmaNo ratings yet
- Wolfgang - Pauli - and - The - Fine-Structure - Constant PsDocument16 pagesWolfgang - Pauli - and - The - Fine-Structure - Constant PsLeonNo ratings yet
- Design of Induction Motors With Flat Wires and Copper Rotor For E-Vehicles Traction SystemDocument10 pagesDesign of Induction Motors With Flat Wires and Copper Rotor For E-Vehicles Traction SystemMehmet AKBABANo ratings yet
- The Graph Below Shows The Number of Enquiries Received by The Tourist Information Office in One City Over A Six Month Period in 2011Document13 pagesThe Graph Below Shows The Number of Enquiries Received by The Tourist Information Office in One City Over A Six Month Period in 2011Hiền VyNo ratings yet
- Back Hoe ExcavatorDocument4 pagesBack Hoe ExcavatorLemi Chala BeyeneNo ratings yet
- Design of Bandpass and Bandstop Infinite Impulse Response Filters Using Fractional DerivativeDocument11 pagesDesign of Bandpass and Bandstop Infinite Impulse Response Filters Using Fractional DerivativerocinguyNo ratings yet
- Radiology QaqcDocument7 pagesRadiology QaqcAnn Caroline FerrerNo ratings yet
- Optimal Placement of Distribution Transformers in Radial Distribution SystemDocument7 pagesOptimal Placement of Distribution Transformers in Radial Distribution SystemJamali NagamoraNo ratings yet
- TDS BorSafe ME3444 (E115026)Document2 pagesTDS BorSafe ME3444 (E115026)charlesNo ratings yet