You might also like
- Nursing Care Plan of The MotherDocument20 pagesNursing Care Plan of The Motherbuang2390% (382)
- CMOS VLSI Design 124Document1 pageCMOS VLSI Design 124Carlos SaavedraNo ratings yet
- Dynamic Analysis of IEEE 14 Bus System: Experiment No: 05Document8 pagesDynamic Analysis of IEEE 14 Bus System: Experiment No: 05apsmadNo ratings yet
- Lab 5Document6 pagesLab 5Ross LevineNo ratings yet
- Solutions - Homework 2 PDFDocument5 pagesSolutions - Homework 2 PDFMehwish AliNo ratings yet
- LAB6Document5 pagesLAB6Juan Camilo Guarnizo Bermudez50% (2)
- IEEE5BusDataPDF 1694272533522Document6 pagesIEEE5BusDataPDF 1694272533522Donkor GeorgeNo ratings yet
- Chapter 3: Ac Power AnalysisDocument40 pagesChapter 3: Ac Power AnalysisSemifallenNo ratings yet
- Design of A Non-Ideal Buck ConverterDocument13 pagesDesign of A Non-Ideal Buck ConverterJames Xgun100% (1)
- Elevator FSMDocument10 pagesElevator FSMNguyễn Đức Tuấn0% (1)
- Power System Analysis II: Instructor: E-Mail: Office PhoneDocument66 pagesPower System Analysis II: Instructor: E-Mail: Office PhoneSelah TalepNo ratings yet
- Assign3-110036411 Agrawal Dhruv HemantDocument7 pagesAssign3-110036411 Agrawal Dhruv Hemantmanan jainNo ratings yet
- L14 Three Phase Half Controlled ConverterDocument18 pagesL14 Three Phase Half Controlled Converterapi-19951707No ratings yet
- Cven 444: Structural Concrete Design: Class ProjectDocument12 pagesCven 444: Structural Concrete Design: Class Projectmasadi1991No ratings yet
- Data 39 BusDocument16 pagesData 39 BusRajesh GangwarNo ratings yet
- The x86 PC - Assembly Language, Design, and Interfacing 5 TH EditionDocument11 pagesThe x86 PC - Assembly Language, Design, and Interfacing 5 TH Editionanamsayeeda SadiqNo ratings yet
- Introduction To LTspice IVDocument38 pagesIntroduction To LTspice IV29377No ratings yet
- Verilog Implementation of Single Cycle MicroprocessorDocument13 pagesVerilog Implementation of Single Cycle MicroprocessorAbhinav JhaNo ratings yet
- Assignmentsolutionselected 150208132823 Conversion Gate02Document30 pagesAssignmentsolutionselected 150208132823 Conversion Gate02apelokayaNo ratings yet
- EMTKnodia PDFDocument765 pagesEMTKnodia PDFbineshNo ratings yet
- VHDL Based Circuits Design and Synthesis On FPGA: A Dice Game Example For EducationDocument6 pagesVHDL Based Circuits Design and Synthesis On FPGA: A Dice Game Example For EducationRam RajaNo ratings yet
- Chapter 3 Voltage ControlDocument33 pagesChapter 3 Voltage ControlNaveen Reddy100% (2)
- Lab 3 AM POC Fall19Document8 pagesLab 3 AM POC Fall19Hassan Ul HaqNo ratings yet
- Electrical Power System Model On MATLAB SimulinkDocument2 pagesElectrical Power System Model On MATLAB Simulinkaalamz93_854917254No ratings yet
- Unsymmetrical Fault AnalysisDocument49 pagesUnsymmetrical Fault AnalysisabdulbabulNo ratings yet
- Power System Analysis Tutorial Sheet 01Document4 pagesPower System Analysis Tutorial Sheet 01Goyal100% (1)
- Frequency Locked Loop DC Motor Speed Control and Monitoring SystemDocument98 pagesFrequency Locked Loop DC Motor Speed Control and Monitoring SystemCHILUKA CHANDRAKANTHNo ratings yet
- Power System Protection With Static RelaysDocument1 pagePower System Protection With Static Relaysprakash_yeeeNo ratings yet
- Ch 07-ChuẩnDocument29 pagesCh 07-ChuẩnTam PhamNo ratings yet
- DSP - ExtraProblems - Solutions PDFDocument28 pagesDSP - ExtraProblems - Solutions PDFdanielNo ratings yet
- EE 392 Measurement Lab Manual PDFDocument29 pagesEE 392 Measurement Lab Manual PDF002Pradeep002No ratings yet
- Chapter 5 Problems CMOS INVERTERDocument8 pagesChapter 5 Problems CMOS INVERTERShykh SheharyarNo ratings yet
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocument21 pagesElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNo ratings yet
- Engineering Prob & Stat Lecture Notes 6Document12 pagesEngineering Prob & Stat Lecture Notes 6EICQ/00154/2020 SAMUEL MWANGI RUKWARONo ratings yet
- Power in AC Circuits.aDocument25 pagesPower in AC Circuits.aJohn Vincent DelacruzNo ratings yet
- Instrument Transformers TutorialDocument5 pagesInstrument Transformers TutorialEzeldeen AgoryNo ratings yet
- CMOS Logic FamilyDocument6 pagesCMOS Logic FamilyAjay GeorgeNo ratings yet
- A Power Analysis Toolbox For MATLAB SimulinkDocument6 pagesA Power Analysis Toolbox For MATLAB SimulinkAhmed58seribegawanNo ratings yet
- Solved Problems To Chapter 08Document6 pagesSolved Problems To Chapter 08Rica Mikaela Cruz100% (1)
- Experiment 6 Zener DiodeDocument8 pagesExperiment 6 Zener DiodeAyeshaNo ratings yet
- Symmetrical Components ExamplesDocument3 pagesSymmetrical Components ExamplesjosembosemNo ratings yet
- 3 Eee Pe PDFDocument107 pages3 Eee Pe PDFjose19313922No ratings yet
- Assignmnet 02 RevisedDocument3 pagesAssignmnet 02 RevisedBilal Ayub100% (1)
- DC-DC Switching Boost ConverterDocument16 pagesDC-DC Switching Boost ConverterRaden Mas AgoenkNo ratings yet
- Ee115hw+sol03 06 N PDFDocument6 pagesEe115hw+sol03 06 N PDFthinkberry22100% (1)
- Simulink Power System Simulation ToolDocument6 pagesSimulink Power System Simulation ToolBill Cai100% (1)
- PMAC Whitepaper PDFDocument15 pagesPMAC Whitepaper PDFIFeLisTigrisNo ratings yet
- AC-DC Converter - DDocument39 pagesAC-DC Converter - DBishnu100% (1)
- Lecture-72 Bus Admittance MatrixDocument33 pagesLecture-72 Bus Admittance MatrixAbhishekNo ratings yet
- B11-1029-MPMC (ECE3004) - MID-TERM QP PDFDocument1 pageB11-1029-MPMC (ECE3004) - MID-TERM QP PDFvikramNo ratings yet
- Generation of High Voltage DC Using Diodes & Capacitors in Ladder NetworkDocument6 pagesGeneration of High Voltage DC Using Diodes & Capacitors in Ladder NetworkEditor IJRITCCNo ratings yet
- Elementary Signals: 1.1 Signals Described in Math FormDocument23 pagesElementary Signals: 1.1 Signals Described in Math FormChoirul Huda100% (1)
- Multi SimDocument27 pagesMulti Simera_terNo ratings yet
- Midterm Examination Solution Problem 1: ROBOTICS LectureDocument8 pagesMidterm Examination Solution Problem 1: ROBOTICS LectureJuaninho MedyNo ratings yet
- Elemen HinggaDocument1 pageElemen Hinggamalau WinarkoNo ratings yet
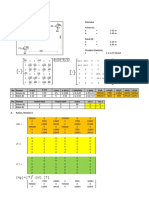
- Contoh Matrix Portal 2D-1Document20 pagesContoh Matrix Portal 2D-1Agus DermawanNo ratings yet
- Tarea5 Garcia VelazquezDocument3 pagesTarea5 Garcia VelazquezChrisNo ratings yet
- ExamsDocument17 pagesExamssteijnNo ratings yet
- Robotics Assignment TwoDocument19 pagesRobotics Assignment Twomisgana etichaNo ratings yet
- Problema 6 PorticosDocument72 pagesProblema 6 PorticosLuis Urpeque GuadalupeNo ratings yet
- Problema 6 PorticosDocument72 pagesProblema 6 PorticosLuis Urpeque GuadalupeNo ratings yet
- CarDocument13 pagesCarAbdul SamadNo ratings yet
- Nme3522 VI Assignement-2020-2021Document10 pagesNme3522 VI Assignement-2020-2021Abdul SamadNo ratings yet
- CarDocument13 pagesCarAbdul SamadNo ratings yet
- Q1: Find The Descriptive Statistics of The Rainfall (MM)Document4 pagesQ1: Find The Descriptive Statistics of The Rainfall (MM)Abdul SamadNo ratings yet
- ECE4500-5500 - W18 - HW-1 - SolutionDocument10 pagesECE4500-5500 - W18 - HW-1 - SolutionAbdul SamadNo ratings yet
- ECE4500-5500 - W18 - HW-1 - SolutionDocument10 pagesECE4500-5500 - W18 - HW-1 - SolutionAbdul SamadNo ratings yet
- MENG 307 Final Set 1Document2 pagesMENG 307 Final Set 1Abdul SamadNo ratings yet
- R G M College of Engineering & R G M College of Engineering &technology TechnologyDocument1 pageR G M College of Engineering & R G M College of Engineering &technology TechnologyAyanwale-cole pelumi AkeemNo ratings yet
- DLP 1 - WEEK 1-Food Processing-Tools, EquipmentDocument4 pagesDLP 1 - WEEK 1-Food Processing-Tools, EquipmentAnalyn B. AbelaNo ratings yet
- Mandowsky RicercheintornoallIconologia 1939Document22 pagesMandowsky RicercheintornoallIconologia 1939Alejandro Jaquero EsparciaNo ratings yet
- NASA 162514main Human NeedsDocument17 pagesNASA 162514main Human NeedsNASAdocuments100% (1)
- Report of PDA Test Pile T29Document20 pagesReport of PDA Test Pile T29bertaNo ratings yet
- (Short Term) (Explain The Nursing Diagnosis)Document1 page(Short Term) (Explain The Nursing Diagnosis)Angel MayNo ratings yet
- Las Math 8 Q1-W1 2021-2022Document3 pagesLas Math 8 Q1-W1 2021-2022Angela Camille PaynanteNo ratings yet
- Calculating Speed Time and Distance (3) .PPT 3rd Quarter Math 6Document25 pagesCalculating Speed Time and Distance (3) .PPT 3rd Quarter Math 6Wilma Ganit BalasNo ratings yet
- Assignment On 3 PL LogisticsDocument16 pagesAssignment On 3 PL LogisticsnirobNo ratings yet
- A Different Approach To Estimate Air MoistureDocument7 pagesA Different Approach To Estimate Air MoistureVal MosNo ratings yet
- EC8093-DIP - Model Exam QPDocument2 pagesEC8093-DIP - Model Exam QPSanthosh PaNo ratings yet
- 3 Probability DistributionsDocument78 pages3 Probability Distributionsha ssanNo ratings yet
- Q.1 Precis Writing Model Ans. LDCE 2018Document1 pageQ.1 Precis Writing Model Ans. LDCE 2018Abhishek GoelNo ratings yet
- Simple and Multiple Regression Models For Relationship Between Electrical Resistivity and Various Soil Properties For Soil Characterization PDFDocument10 pagesSimple and Multiple Regression Models For Relationship Between Electrical Resistivity and Various Soil Properties For Soil Characterization PDFPato MeraNo ratings yet
- TI-EN-UVACURID C81 FarbserieDocument12 pagesTI-EN-UVACURID C81 FarbseriePatxi hernandez suellesNo ratings yet
- Magnetic Reduction-To-The-Pole at Low Latitudes: Observations and ConsiderationsDocument11 pagesMagnetic Reduction-To-The-Pole at Low Latitudes: Observations and ConsiderationscarlosNo ratings yet
- TOPIC: Assessing The Knowledge and Attitude Towards Online Netiquette of High School Students of Mandaue City Comprehensive National High SchoolDocument12 pagesTOPIC: Assessing The Knowledge and Attitude Towards Online Netiquette of High School Students of Mandaue City Comprehensive National High SchoolMarjoe MejiasNo ratings yet
- User Manual Auto-Reclosing ProtectorDocument8 pagesUser Manual Auto-Reclosing ProtectorThiago GusmãoNo ratings yet
- NCERT Solutions Class 7 Science Chapter 15 LightDocument5 pagesNCERT Solutions Class 7 Science Chapter 15 LightJAI PRAJEN PRO HACKERNo ratings yet
- BSBLDR523 Lead and Manage Effective Workplace Relationships Assessment BookletDocument21 pagesBSBLDR523 Lead and Manage Effective Workplace Relationships Assessment BookletJeremiah Noromor Ronquillo100% (1)
- Engineering Data On Valve Selection Sizing and Location CSA Air Valves PDFDocument27 pagesEngineering Data On Valve Selection Sizing and Location CSA Air Valves PDFtruss85No ratings yet
- Unit Plan Template: Teacher Subject/Class/Course Unit Title Grade Level Duration: 10 Days Date/s: November 17Document5 pagesUnit Plan Template: Teacher Subject/Class/Course Unit Title Grade Level Duration: 10 Days Date/s: November 17api-546896006No ratings yet
- Bozic Niksa 2018 Chardak Ni Na Zemlji Ni Na Nebu PrikazDocument1 pageBozic Niksa 2018 Chardak Ni Na Zemlji Ni Na Nebu PrikazSanja LoncarNo ratings yet
- Transformers: 3.1 What Is Magnetic Material and Give Difference Between Magnetic and Non Magnetic MaterialDocument24 pagesTransformers: 3.1 What Is Magnetic Material and Give Difference Between Magnetic and Non Magnetic Materialkrishnareddy_chintalaNo ratings yet
- Nadia Maharani Eka Suci: Education LevelDocument1 pageNadia Maharani Eka Suci: Education LevelMICHELLE BENEDICTANo ratings yet
- WMM Mix DesignDocument44 pagesWMM Mix DesignAshok amlapure100% (1)
- Practical MagnetotelluricsDocument14 pagesPractical MagnetotelluricsjesaduNo ratings yet
- VMWare EBooks - VMware Workspace ONE - Deploy and Manage (V22.x) Student Lecture Manual1Document50 pagesVMWare EBooks - VMware Workspace ONE - Deploy and Manage (V22.x) Student Lecture Manual1Saeed NasharNo ratings yet
- FINA 4250 Applications of Risk ModelsDocument67 pagesFINA 4250 Applications of Risk ModelsChristopherNo ratings yet