You might also like
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Some of The Developments That Have Made To Overcome The Disadvantages of Previously Used Elevators AreDocument13 pagesSome of The Developments That Have Made To Overcome The Disadvantages of Previously Used Elevators AreShubham PatilNo ratings yet
- Arduino Mega 2560 Elevator ProjDocument5 pagesArduino Mega 2560 Elevator ProjTik Tok100% (1)
- L928N DatasheetDocument2 pagesL928N DatasheetrubricaltwoNo ratings yet
- Microcontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarDocument4 pagesMicrocontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarJagdish PatankarNo ratings yet
- Tab005 - 3W - AC - MIT - Control System PDFDocument72 pagesTab005 - 3W - AC - MIT - Control System PDFMohammed Al-hewaimel100% (1)
- Car Parking DocumentationDocument11 pagesCar Parking Documentationaenuguprasadrao67% (3)
- 5 Phase New Pent Bipolar DriverDocument11 pages5 Phase New Pent Bipolar DriverMurat YenerNo ratings yet
- Section 2 SR Power Conversion System 004 PDFDocument76 pagesSection 2 SR Power Conversion System 004 PDFHarry Wart Wart100% (1)
- Medium Voltage Controllers: Description - Bulletin 1500 Vacuum ControllersDocument2 pagesMedium Voltage Controllers: Description - Bulletin 1500 Vacuum ControllersGregory StewartNo ratings yet
- PM Stepper Motor Control System by Pic - NG Wai Liang - QA76.5.N48 2006Document28 pagesPM Stepper Motor Control System by Pic - NG Wai Liang - QA76.5.N48 2006Nirmal KumarNo ratings yet
- The CNC h4 SystemDocument8 pagesThe CNC h4 SystemRobert GiangNo ratings yet
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodNo ratings yet
- UTD Autonomous Underwater Vehicle: Michael Giambalvo, Ed Paradis, Eric SumnerDocument7 pagesUTD Autonomous Underwater Vehicle: Michael Giambalvo, Ed Paradis, Eric SumnernntoolNo ratings yet
- Embedded System AssignmentDocument14 pagesEmbedded System AssignmentUmer KhanNo ratings yet
- MINI PROJECT DC Main DrivesDocument35 pagesMINI PROJECT DC Main DrivesSriram MogalapalliNo ratings yet
- EE 476 Final ProjectDocument5 pagesEE 476 Final ProjectrokshyrNo ratings yet
- Stepper Motor TutorialDocument6 pagesStepper Motor TutorialengrodeNo ratings yet
- AJJDocument10 pagesAJJmandalapu91No ratings yet
- Hills Train Power Generation Automatic Railway Gate Control 8821 YPf52T0Document10 pagesHills Train Power Generation Automatic Railway Gate Control 8821 YPf52T0BANOTH KUMAR0% (1)
- P0118 Common Driver Platform 12V 18V SystemsDocument6 pagesP0118 Common Driver Platform 12V 18V SystemsJORGE ERRAZQUINNo ratings yet
- Design of Five Floors Elevator With SCADA System Based On S7200 PLCDocument6 pagesDesign of Five Floors Elevator With SCADA System Based On S7200 PLCothmanNo ratings yet
- One: Introduction and FeaturesDocument59 pagesOne: Introduction and Featurestharun100% (2)
- Automatic Railway Gate Controlling SystemDocument70 pagesAutomatic Railway Gate Controlling Systemnarendar32No ratings yet
- Driver Motor BrushlesDocument48 pagesDriver Motor BrushlesGONAJ2008No ratings yet
- EPS AC Wire Guidance Itens 1.0-5.2Document8 pagesEPS AC Wire Guidance Itens 1.0-5.2Jose SantosNo ratings yet
- Mobile Robot Chapter 7: The Motors of The Robot (V.4a)Document18 pagesMobile Robot Chapter 7: The Motors of The Robot (V.4a)Carlos RamirezNo ratings yet
- Stepper Motor Control - Stepper Motor DriversDocument2 pagesStepper Motor Control - Stepper Motor DriversJEOVADJNo ratings yet
- 1584244366project GiidelineDocument12 pages1584244366project Giidelinedavut alkanNo ratings yet
- 2050622203Document7 pages2050622203onosNo ratings yet
- Stepper Motor Control Through RF LinkDocument12 pagesStepper Motor Control Through RF Linkmrx1061100% (1)
- NR-EA/NDR-EA Reach TrucksDocument6 pagesNR-EA/NDR-EA Reach TrucksConitos Outlet FactoryNo ratings yet
- 4 Levels ElevatorsDocument4 pages4 Levels Elevators4gen_7No ratings yet
- Backmann 36-558Document2 pagesBackmann 36-558AntonioNo ratings yet
- Automatic Car Parking Using Puzzling LogicDocument27 pagesAutomatic Car Parking Using Puzzling Logicananto bilowoNo ratings yet
- Wiki - DC Servomotor ControllerDocument11 pagesWiki - DC Servomotor Controllerm.mignecoNo ratings yet
- Variable Frequency DrivesDocument17 pagesVariable Frequency DrivesVinay Tarsem Lal100% (1)
- Servo Motor - Diagram, Definition, Types, Working & ApplicationsDocument31 pagesServo Motor - Diagram, Definition, Types, Working & ApplicationsTanmay MalhotraNo ratings yet
- Electric Locomotive Microcomputer Control SystemDocument76 pagesElectric Locomotive Microcomputer Control SystemReginaldoPinhoNo ratings yet
- Flying ShearDocument5 pagesFlying ShearCarlos RamirezNo ratings yet
- Electrical Design Report On E-Bike.: Skyline Racing, KIIT, Bhubaneshwar. B.Tech, Mechanical EngineeringDocument11 pagesElectrical Design Report On E-Bike.: Skyline Racing, KIIT, Bhubaneshwar. B.Tech, Mechanical EngineeringRahul Mishra100% (12)
- Stepper Motor ReportDocument13 pagesStepper Motor ReportVolda0% (2)
- Traffic ControlDocument29 pagesTraffic ControlacroaliNo ratings yet
- Contributors: Toni - K Favorite 7Document13 pagesContributors: Toni - K Favorite 7mgodoy2585No ratings yet
- Electrician QuestionsDocument12 pagesElectrician QuestionsTAHRI BELGACEMNo ratings yet
- Selection of Motor: 1. SPEED: in PIC IC The Execution of An Instruction Is Very Fast (In Micro Seconds) and Can BeDocument12 pagesSelection of Motor: 1. SPEED: in PIC IC The Execution of An Instruction Is Very Fast (In Micro Seconds) and Can Bebsirisha415No ratings yet
- 418 Automatic Railway Gate Control SystemDocument27 pages418 Automatic Railway Gate Control SystemRam VBIT100% (1)
- Interface L298N DC Motor Driver Module With ArduinoDocument16 pagesInterface L298N DC Motor Driver Module With ArduinoIhot HarianjaNo ratings yet
- Dd03 Proiect Self ParkingDocument29 pagesDd03 Proiect Self ParkingIlie IulianNo ratings yet
- Robotic ArmDocument106 pagesRobotic ArmGourav SinglaNo ratings yet
- Kelly Ke Bus Er ManualDocument16 pagesKelly Ke Bus Er Manualhmgp1975No ratings yet
- Self Balancing Robot Using PidDocument21 pagesSelf Balancing Robot Using Pidline follower robotNo ratings yet
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocument12 pagesFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaNo ratings yet
- FactFile AD14 en RevA Brigde LowresDocument2 pagesFactFile AD14 en RevA Brigde LowresRakshith KumarNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Chapter 2 Assembly Language Programming: Spring'17 Twhou 8051Document51 pagesChapter 2 Assembly Language Programming: Spring'17 Twhou 8051孫協廷No ratings yet
- Contactors and Contactor Assemblies: Contactors For Switching Motors SiriusDocument8 pagesContactors and Contactor Assemblies: Contactors For Switching Motors SiriuschochoroyNo ratings yet
- Inter Modulation TestDocument9 pagesInter Modulation TestAhmad Arif ZulfikarNo ratings yet
- Home Pro: 8 Output Universal 40mm PLL LNB Idlh-Oct410-Hmpro-OpnDocument2 pagesHome Pro: 8 Output Universal 40mm PLL LNB Idlh-Oct410-Hmpro-OpnYohannes G MedhinNo ratings yet
- UCC2863x, High-Power Flyback Controller With Primary-Side Regulation and Peak-Power ModeDocument85 pagesUCC2863x, High-Power Flyback Controller With Primary-Side Regulation and Peak-Power ModeKumari MugilanNo ratings yet
- Tone Ringer Interface: DescriptionDocument6 pagesTone Ringer Interface: DescriptionVasilij PupkinNo ratings yet
- CB 2 Du NF 01Document2 pagesCB 2 Du NF 01lucvtNo ratings yet
- Interpret Electrical Wiring PlanDocument28 pagesInterpret Electrical Wiring PlanManolito Jr MercadoNo ratings yet
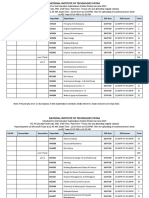
- Exam Schedule Final - PDF - 02 - 07 - 2020Document39 pagesExam Schedule Final - PDF - 02 - 07 - 2020kundan kumarNo ratings yet
- Fieldmaster User ManualDocument40 pagesFieldmaster User ManualArun BalaNo ratings yet
- MC2100 Spec SheetDocument2 pagesMC2100 Spec SheetToma HrgNo ratings yet
- Control Design: 5.1 Basic ConceptsDocument7 pagesControl Design: 5.1 Basic ConceptsAnneNo ratings yet
- Copperhead 3200Document4 pagesCopperhead 3200tonymontana2009No ratings yet
- HT-XQ100: Stylish Home Theater SystemDocument2 pagesHT-XQ100: Stylish Home Theater SystemJoko NugrohoNo ratings yet
- CN Record Week1 Experiment - 1 AIM: To Perform Different Topologies. INTRODUCTION: Two or More Devices Connected To A Link The Two or More Links Form ADocument59 pagesCN Record Week1 Experiment - 1 AIM: To Perform Different Topologies. INTRODUCTION: Two or More Devices Connected To A Link The Two or More Links Form AHarshavardhan Reddy BethireddyNo ratings yet
- Electronic Semiconductor: Conductivity ModulationDocument14 pagesElectronic Semiconductor: Conductivity ModulationSachin PoriaNo ratings yet
- Execution Unit (EU) : Instruction Queue, and The Instruction Pointer. It Has The Task of Making Sure That The BusDocument10 pagesExecution Unit (EU) : Instruction Queue, and The Instruction Pointer. It Has The Task of Making Sure That The BusPradeep RanaNo ratings yet
- Do-254 WPDocument10 pagesDo-254 WPMazen OmerNo ratings yet
- Ignition & Transformers - Boiler Parts - Boilerparts - Co.keDocument64 pagesIgnition & Transformers - Boiler Parts - Boilerparts - Co.keboilerparts100% (1)
- PT-D3500E: Operating InstructionsDocument64 pagesPT-D3500E: Operating InstructionsSayed HashemNo ratings yet
- SS301 Series Piezoresistive Pressure Transmitters For Gas and LiquidDocument4 pagesSS301 Series Piezoresistive Pressure Transmitters For Gas and LiquidGabriel MazzeiNo ratings yet
- D 450Document6 pagesD 450Jose Benavides100% (1)
- gt06n Leaflet PDFDocument2 pagesgt06n Leaflet PDFEarthwheel TrackingNo ratings yet
- Bas 28 R 2Document3 pagesBas 28 R 2sergio ribeiroNo ratings yet
- Q7063 BIOS Updater Manual V2Document18 pagesQ7063 BIOS Updater Manual V2TDCSoftNo ratings yet
- Biostar TP75 (IB75B-AHS) Rev 6.0 СхемаDocument47 pagesBiostar TP75 (IB75B-AHS) Rev 6.0 СхемаTimurNo ratings yet
- Series Resonance - GATE Study Material in PDFDocument6 pagesSeries Resonance - GATE Study Material in PDFTestbook BlogNo ratings yet
- Molchanov A 2014Document7 pagesMolchanov A 2014mayuri sritharanNo ratings yet
- 1.DEMO Lesson PlanDocument3 pages1.DEMO Lesson Planciantal batobatoNo ratings yet
- Microphone TechniquesDocument3 pagesMicrophone Techniquesapc3211No ratings yet