You might also like
- Reinforced Concrete Design, Performance and Applications by Sharon RobinsonDocument194 pagesReinforced Concrete Design, Performance and Applications by Sharon RobinsonSolomon AhimbisibweNo ratings yet
- Axial - Loaded Pile PLAXIS 2dDocument4 pagesAxial - Loaded Pile PLAXIS 2dMarko AdamovićNo ratings yet
- Coupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsFrom EverandCoupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsNo ratings yet
- Analysis of A Failed Pipe Elbow in Geothermal Production Facility PDFDocument7 pagesAnalysis of A Failed Pipe Elbow in Geothermal Production Facility PDFAz ArNo ratings yet
- Bored Tunnel Lining Design in Soft Soils - Analytical vs NumericalDocument7 pagesBored Tunnel Lining Design in Soft Soils - Analytical vs NumericalDEBASISNo ratings yet
- CONTROL VALVE KVMG270 DisassemblyDocument22 pagesCONTROL VALVE KVMG270 DisassemblyArbey Gonzalez100% (3)
- Stress Corrosion Cracking of A723 Steel Pressure Vessel Two Case StudiesDocument38 pagesStress Corrosion Cracking of A723 Steel Pressure Vessel Two Case Studieslitao2314No ratings yet
- Control Valve AnimationDocument30 pagesControl Valve Animationvitor santosNo ratings yet
- Orienting Perforations in The Right DirectionDocument16 pagesOrienting Perforations in The Right Directionbm_niculescuNo ratings yet
- Mechanic of Solid and Shells PDFDocument521 pagesMechanic of Solid and Shells PDFKomarudinNo ratings yet
- KVMG LectureDocument23 pagesKVMG LectureAan WahyudiNo ratings yet
- Cerig Rbe3 Rigid184Document6 pagesCerig Rbe3 Rigid184Balaji ModepalliNo ratings yet
- P-Y MethodDocument10 pagesP-Y MethodJillian HowardNo ratings yet
- Soil Tire InteractionDocument25 pagesSoil Tire InteractionsiritapeNo ratings yet
- 45673-7 2010Document22 pages45673-7 2010Venin0% (1)
- 3D FEA of Soil-Geogrid Pull-outDocument8 pages3D FEA of Soil-Geogrid Pull-outManaswini VadlamaniNo ratings yet
- Monte Carlo Simulation of SSI Effects Using Simple Rheological Soil ModelDocument9 pagesMonte Carlo Simulation of SSI Effects Using Simple Rheological Soil ModelRui CbNo ratings yet
- Plaxis1 PDFDocument11 pagesPlaxis1 PDFSmail ZennoucheNo ratings yet
- Computers and Geotechnics: Brian B. Sheil, Bryan A. MccabeDocument14 pagesComputers and Geotechnics: Brian B. Sheil, Bryan A. MccabemutashimaNo ratings yet
- Modelling Liquefaction Effects - From Lateral Spreading To Soil-Structure InteractionDocument13 pagesModelling Liquefaction Effects - From Lateral Spreading To Soil-Structure InteractionCătălin CăpraruNo ratings yet
- An Overview of Methods To Convert Cone Index To Bevameter ParametersDocument25 pagesAn Overview of Methods To Convert Cone Index To Bevameter Parametersrakshita bsNo ratings yet
- Simulation For Rubber Friction On Self-Affine Surface Based On Energy MethodDocument5 pagesSimulation For Rubber Friction On Self-Affine Surface Based On Energy MethodLuis Jorge Herrera FernandezNo ratings yet
- Fatigue and RuttingDocument10 pagesFatigue and RuttingNadeem QureshiNo ratings yet
- Accepted Manuscript: 10.1016/j.jtte.2017.07.004Document21 pagesAccepted Manuscript: 10.1016/j.jtte.2017.07.004Anonymous eCD5ZRNo ratings yet
- Aminaton Marto - Foundation Size Effect On Modulus of Subgrade Reaction On Sandy SoilsDocument8 pagesAminaton Marto - Foundation Size Effect On Modulus of Subgrade Reaction On Sandy Soilsmateus456No ratings yet
- Istvs2011 3 PDFDocument12 pagesIstvs2011 3 PDFeidalinNo ratings yet
- Numerical simulation of vertically loaded piles using PLAXIS 2DDocument5 pagesNumerical simulation of vertically loaded piles using PLAXIS 2DSatya kaliprasad vangaraNo ratings yet
- Finite Element Analysis For Airfield Asphalt PavementsDocument7 pagesFinite Element Analysis For Airfield Asphalt Pavementshuseyin karadagNo ratings yet
- Soil improvement increases seismic bearing capacityDocument10 pagesSoil improvement increases seismic bearing capacityabrha destaNo ratings yet
- 17 PDFDocument8 pages17 PDFamirNo ratings yet
- Manzari2001-On Integration of Cyclic Soil ModelDocument25 pagesManzari2001-On Integration of Cyclic Soil ModelsharikaNo ratings yet
- Scale Effect of Spread Foundation Loading Tests Using Various Size PlatesDocument8 pagesScale Effect of Spread Foundation Loading Tests Using Various Size PlatesThắng HồNo ratings yet
- musso2008Document15 pagesmusso2008badisnoveNo ratings yet
- 2D Numerical Analysis of Settlement Due to Tunneling Using Generalized Plasticity ModelDocument6 pages2D Numerical Analysis of Settlement Due to Tunneling Using Generalized Plasticity ModelAnh DoNo ratings yet
- Dynamic Analysis of Soil-Pile Interaction EffectsDocument8 pagesDynamic Analysis of Soil-Pile Interaction EffectsGizeth AguilarNo ratings yet
- 1209 3169 1 SMDocument17 pages1209 3169 1 SMDina AvdićNo ratings yet
- Analysis of Pile Group Subjected To Embankment Induced Soil MovementDocument10 pagesAnalysis of Pile Group Subjected To Embankment Induced Soil MovementSeif EddineNo ratings yet
- Vertical Drain 1Document12 pagesVertical Drain 1Dian_SipilNo ratings yet
- M20Document8 pagesM20rowatersNo ratings yet
- Foundation Size Effect On Modulus of Sub Grade Reaction On Sandy SoilsDocument7 pagesFoundation Size Effect On Modulus of Sub Grade Reaction On Sandy SoilsAulia RahmawatiNo ratings yet
- Bearing Capacity of Eccentrically Loaded FootingsDocument18 pagesBearing Capacity of Eccentrically Loaded FootingsAlaaGaballaNo ratings yet
- Engineering Journal To Experimental Study of Comparison and Development of Design For Rigid Pavement by Finite Element MethodDocument7 pagesEngineering Journal To Experimental Study of Comparison and Development of Design For Rigid Pavement by Finite Element MethodEngineering JournalNo ratings yet
- Plaxis 3d Journal PaperDocument12 pagesPlaxis 3d Journal PaperNaveen BPNo ratings yet
- Shafiqu Jeas 0608 104Document7 pagesShafiqu Jeas 0608 104MarkoNo ratings yet
- Schneider Muntau Bathaeian2018 Article SimulationOfSettlementAndBeariDocument17 pagesSchneider Muntau Bathaeian2018 Article SimulationOfSettlementAndBeariAbderrahmane AbdelahelhirtsiNo ratings yet
- Dynamic Behavior of An Isolated Bridge Pier Under Earthquake Effects For Different Soil Layers and Support ConditionsDocument24 pagesDynamic Behavior of An Isolated Bridge Pier Under Earthquake Effects For Different Soil Layers and Support ConditionsMurat SamatNo ratings yet
- Soil-Structure Interaction in Resonant Railway BridgesDocument18 pagesSoil-Structure Interaction in Resonant Railway BridgesBRAYAN GERARDO AREVALO MENDOZANo ratings yet
- International Society for Soil Mechanics and Geotechnical Engineering Conference PaperDocument10 pagesInternational Society for Soil Mechanics and Geotechnical Engineering Conference PaperJose FernandoNo ratings yet
- Numerical simulation of ground anchors load transferDocument10 pagesNumerical simulation of ground anchors load transferDANIEKD HJEHEHENo ratings yet
- Review of Seismic Design, Analysis and Performance of MSE, Slope and EmbankmentDocument33 pagesReview of Seismic Design, Analysis and Performance of MSE, Slope and EmbankmentSajjad AnwarNo ratings yet
- Abdelraman2005 - Studio para Met RicoDocument10 pagesAbdelraman2005 - Studio para Met RicoLuna MarinoNo ratings yet
- Boscardin 1990Document17 pagesBoscardin 1990mahdNo ratings yet
- 14 - Chapter 2Document8 pages14 - Chapter 2Sundeep SandyNo ratings yet
- Soil-Structure Interaction For Landslide Stabilizing Piles: C.-Y. Chen, G.R. MartinDocument24 pagesSoil-Structure Interaction For Landslide Stabilizing Piles: C.-Y. Chen, G.R. Martinramarathnam1989No ratings yet
- 10Document12 pages10rowatersNo ratings yet
- Numericalmodelingofdynamiccompactionindry Sand Using Different Constitutive ModelsDocument8 pagesNumericalmodelingofdynamiccompactionindry Sand Using Different Constitutive ModelsRafael WolfgangNo ratings yet
- Ijciet 08 10 096Document8 pagesIjciet 08 10 096aekockautNo ratings yet
- Elastoplastic Constitutive Modelling ofDocument18 pagesElastoplastic Constitutive Modelling ofJose Joaquin Lozano RadaNo ratings yet
- Numerical Study of The Bearing Capacity For Two Interfering Strip Footings On SandsDocument9 pagesNumerical Study of The Bearing Capacity For Two Interfering Strip Footings On SandsOum MahmdNo ratings yet
- J Mechrescom 2006 01 002Document17 pagesJ Mechrescom 2006 01 002MoharaNo ratings yet
- Ictpa 26 187 PDFDocument9 pagesIctpa 26 187 PDFmmalani09No ratings yet
- Numerical simulation of a vibratory roller on cohesionless soilDocument23 pagesNumerical simulation of a vibratory roller on cohesionless soilshravan38No ratings yet
- Foundation Size Effect On Modulus of Subgrade Reaction Rested On Clayey Soil. M. JanbazDocument8 pagesFoundation Size Effect On Modulus of Subgrade Reaction Rested On Clayey Soil. M. JanbazstanislavNo ratings yet
- Geosynthetic-Reinforced Pile-Supported Embankments 3D Discrete Numerical Analyses of The Interaction and Mobilization MechanismsDocument20 pagesGeosynthetic-Reinforced Pile-Supported Embankments 3D Discrete Numerical Analyses of The Interaction and Mobilization Mechanisms云城择栖No ratings yet
- Modeling Laminated Orthotropic Plate-FoundationDocument22 pagesModeling Laminated Orthotropic Plate-FoundationJesus Said Garcia RojasNo ratings yet
- A Comprehensive Wheel Terrain Contact MoDocument19 pagesA Comprehensive Wheel Terrain Contact MocticusorNo ratings yet
- Flexible Pavement Analysis Considering Temperature Profile and Anisotropy Behavior in Hot Mix Ashalt LayerDocument6 pagesFlexible Pavement Analysis Considering Temperature Profile and Anisotropy Behavior in Hot Mix Ashalt LayerVidhi VyasNo ratings yet
- Wear Model PDFDocument14 pagesWear Model PDFDiego FloresNo ratings yet
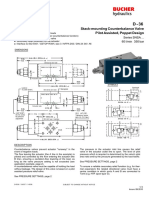
- Stack-Mounting Counterbalance Valve Pilot Assisted, Poppet DesignDocument4 pagesStack-Mounting Counterbalance Valve Pilot Assisted, Poppet Designnemi90No ratings yet
- Handheld Hydraulic Readouts & DataloggersDocument5 pagesHandheld Hydraulic Readouts & Dataloggersnemi90No ratings yet
- Portable Oil and Fuel Cleanliness Monitor: Technical DatasheetDocument12 pagesPortable Oil and Fuel Cleanliness Monitor: Technical Datasheetnemi90No ratings yet
- SPV - Valvole Di Sfioro SicurezzaDocument12 pagesSPV - Valvole Di Sfioro SicurezzaSandro SammoriNo ratings yet
- Hydraulic Excavator: Engine Power Operating Weight - North America Operating Weight - Europe/Australia and New ZealandDocument16 pagesHydraulic Excavator: Engine Power Operating Weight - North America Operating Weight - Europe/Australia and New Zealandnemi90No ratings yet
- Coal Mine Equipment PartsDocument25 pagesCoal Mine Equipment Partsnemi90No ratings yet
- Electronic Temperature Transmitter With HSI Sensor Recognition ETS 4548-HDocument2 pagesElectronic Temperature Transmitter With HSI Sensor Recognition ETS 4548-Hnemi90No ratings yet
- Single Counterbalance, Relief Compensated: A-VBSO-SE-CC-30-PL 08.45.17 - X - Y - ZDocument2 pagesSingle Counterbalance, Relief Compensated: A-VBSO-SE-CC-30-PL 08.45.17 - X - Y - Znemi90No ratings yet
- EN3302 SK-Hochdruck KatalogversionDocument6 pagesEN3302 SK-Hochdruck Katalogversionnemi90No ratings yet
- CÂY MÀU QUỐC TẾ RAL JOTUN (1) - PDFDocument6 pagesCÂY MÀU QUỐC TẾ RAL JOTUN (1) - PDFTrần Thanh PhongNo ratings yet
- Series TEF 41 DN15 PN10: Return Line Filter Sheet No. 1040 HDocument4 pagesSeries TEF 41 DN15 PN10: Return Line Filter Sheet No. 1040 Hnemi90No ratings yet
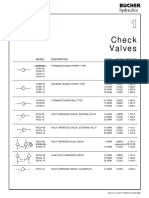
- 01 Check Valve Mini CatalogDocument50 pages01 Check Valve Mini Catalognemi90No ratings yet
- Socket Head Cap Screws Technical Specifications and Drill SizesDocument3 pagesSocket Head Cap Screws Technical Specifications and Drill Sizesnemi90No ratings yet
- Z2FS 6 New Series... 40BDocument6 pagesZ2FS 6 New Series... 40Bnemi90No ratings yet
- High-performance vane motors explainedDocument23 pagesHigh-performance vane motors explainednemi90No ratings yet
- RAL Classic Colour Chart: Wednesday March 23rd 2011Document5 pagesRAL Classic Colour Chart: Wednesday March 23rd 2011nemi90No ratings yet
- 2FRM 6Document6 pages2FRM 6Romly MechNo ratings yet
- Nominal Pipe Size: Navigation SearchDocument5 pagesNominal Pipe Size: Navigation Searchnemi90No ratings yet
- DBETR - Proportional Pressure Relief ValveDocument5 pagesDBETR - Proportional Pressure Relief Valvenemi90No ratings yet
- Z2FS 6, 16, 22 Modular Throttle Check ValveDocument6 pagesZ2FS 6, 16, 22 Modular Throttle Check Valvenemi90No ratings yet
- Size 10 and 16 Up To 31.5mpa Up To 160 L/Min: 2-Way Flow Control Valve, Type 2FrmDocument6 pagesSize 10 and 16 Up To 31.5mpa Up To 160 L/Min: 2-Way Flow Control Valve, Type 2Frmnemi90No ratings yet
- SAE Flanged ConnectionDocument2 pagesSAE Flanged Connectionnemi90No ratings yet
- ZDC-16, 25, 32 Meter-In Pressure Compensator, Direct OperatedDocument7 pagesZDC-16, 25, 32 Meter-In Pressure Compensator, Direct Operatednemi90No ratings yet
- Z2FS 10 New Series... 30BDocument8 pagesZ2FS 10 New Series... 30Bnemi90No ratings yet
- ButtWeld Swivel Flange - ISO 6164Document1 pageButtWeld Swivel Flange - ISO 6164nemi90No ratings yet
- Socket Weld Flange - ISO-6162Document2 pagesSocket Weld Flange - ISO-6162nemi90No ratings yet
- CFD and Thermal Stress Analysis of Helium-Cooled Divertor ConceptsDocument25 pagesCFD and Thermal Stress Analysis of Helium-Cooled Divertor ConceptscarlvigNo ratings yet
- Final Year Project - (Mechanical) IEEE 2016-17 Project ListDocument10 pagesFinal Year Project - (Mechanical) IEEE 2016-17 Project ListSPECTRUM SOLUTIONSNo ratings yet
- Rolling - Nptel PDFDocument10 pagesRolling - Nptel PDFAmit RoyNo ratings yet
- International Journal of Solids and Structures: Weiguo Wu, Xin CaoDocument9 pagesInternational Journal of Solids and Structures: Weiguo Wu, Xin CaoNilma Rosa Barsallo PachecoNo ratings yet
- ASTM C 42-C 42M-99 TM Drilled Cores Sawed Beams of Conc PDFDocument4 pagesASTM C 42-C 42M-99 TM Drilled Cores Sawed Beams of Conc PDFtariqkhanNo ratings yet
- Comparative Research Into The Load-Bearing Capacity of Horizontal Pressure Vessels Supported by SaddlesDocument13 pagesComparative Research Into The Load-Bearing Capacity of Horizontal Pressure Vessels Supported by SaddlesMarek AdamczykNo ratings yet
- Welded Connection - 2Document11 pagesWelded Connection - 2Ravi RawatNo ratings yet
- Curvature CorrectionDocument7 pagesCurvature CorrectionE J SNo ratings yet
- Mooney RivlinDocument2 pagesMooney RivlinPorto GeeNo ratings yet
- BudMesh2D TreadMesh3Document10 pagesBudMesh2D TreadMesh3Etienne JankovichNo ratings yet
- Asphalt Institutes Guidance Document On Using MSCR With AASHTO M320Document3 pagesAsphalt Institutes Guidance Document On Using MSCR With AASHTO M320TK ThachNo ratings yet
- Optimization of Geodetic DesignDocument9 pagesOptimization of Geodetic Designdev burmanNo ratings yet
- Anna University ME2303 Design of Machine Elements Exam QuestionsDocument3 pagesAnna University ME2303 Design of Machine Elements Exam QuestionssathurvedhaNo ratings yet
- Sofiload 1 PDFDocument286 pagesSofiload 1 PDFAshutoshAparajNo ratings yet
- FRM Download File NewDocument106 pagesFRM Download File NewYASHMIT MADAVINo ratings yet
- Mechanism and Machine Theory: J.S. RaoDocument28 pagesMechanism and Machine Theory: J.S. RaoClaudia Retamoso LlamasNo ratings yet
- Development of An Electric Powered Tiller For House GardeningDocument6 pagesDevelopment of An Electric Powered Tiller For House GardeningVishal LabdeNo ratings yet
- SHM ShipsDocument152 pagesSHM ShipsHemanandNo ratings yet
- Abdoul Salam Issiaka IbrahimDocument70 pagesAbdoul Salam Issiaka IbrahimAbdoul Salam IbrahimNo ratings yet
- Beijer Lundberg-On The Modelling of Piles in Sand in The Small Geotechnical CentrifugeDocument10 pagesBeijer Lundberg-On The Modelling of Piles in Sand in The Small Geotechnical CentrifugeNadher Al-BaghdadiNo ratings yet
- Sand 2Document21 pagesSand 2Pavan MNo ratings yet
- MOM-I Topic-1 StressDocument41 pagesMOM-I Topic-1 StressNoor FatimaNo ratings yet
- Structural Panels in Tension: Standard Test Methods ForDocument6 pagesStructural Panels in Tension: Standard Test Methods ForMarvin MoreiraNo ratings yet