You might also like
- LVL 1 The Slaying StoneDocument34 pagesLVL 1 The Slaying StoneArturo Partida95% (19)
- A Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesDocument4 pagesA Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesGabriel de SáNo ratings yet
- Guide Lines of PM Motor Design For High Power EV ApplicationsDocument12 pagesGuide Lines of PM Motor Design For High Power EV ApplicationsShovan DeyNo ratings yet
- A History of The Methodist Episcopal Church Volume I (Nathan D.D.bangs)Document244 pagesA History of The Methodist Episcopal Church Volume I (Nathan D.D.bangs)Jaguar777xNo ratings yet
- BSBMGT608C Manage Innovation Case Study AC GilbertDocument13 pagesBSBMGT608C Manage Innovation Case Study AC Gilbertbacharnaja9% (11)
- Direct Torque Control On BLDC Motor For Electric VehicleDocument10 pagesDirect Torque Control On BLDC Motor For Electric VehicleIJRASETPublicationsNo ratings yet
- Paper 6Document9 pagesPaper 6Pala PalaNo ratings yet
- The Effect of End Windings and The Bearing Labyrinth Seals OnDocument11 pagesThe Effect of End Windings and The Bearing Labyrinth Seals OnpriyankaprashaanthNo ratings yet
- Robust Sensorless Control Against Thermally Degraded Speed Performance in An IMDocument12 pagesRobust Sensorless Control Against Thermally Degraded Speed Performance in An IMu2005044No ratings yet
- Continuously Motor-Synchronized Ride-Through Capability For Matrix-Converter Adjustable-Speed DrivesDocument11 pagesContinuously Motor-Synchronized Ride-Through Capability For Matrix-Converter Adjustable-Speed DrivesMaikPortnoyNo ratings yet
- High Efficiency LLC Resonant Converter With Wide Output Range of 200-1000 V For DC-Connected EVs Ultra-Fast Charging StationsDocument12 pagesHigh Efficiency LLC Resonant Converter With Wide Output Range of 200-1000 V For DC-Connected EVs Ultra-Fast Charging StationsAYUSH GOYALNo ratings yet
- Efficiency Improvement Analysis of A SiC MOSFET-based PMSM Drive System With Variable Switching FrequencyDocument9 pagesEfficiency Improvement Analysis of A SiC MOSFET-based PMSM Drive System With Variable Switching Frequencymdht1556No ratings yet
- Experimental Verification of Regenerative Braking Characteristics by Applying Different Motor Armature VoltageDocument4 pagesExperimental Verification of Regenerative Braking Characteristics by Applying Different Motor Armature VoltagekpenteyssNo ratings yet
- Eficiencia de Un Doble Motor en Un AutomovilDocument10 pagesEficiencia de Un Doble Motor en Un AutomovilManuelGonzalesGustavsonNo ratings yet
- Saepaper Lacerte 2014-12-12Document12 pagesSaepaper Lacerte 2014-12-12Thiên ThanhNo ratings yet
- A Review of Structural and Thermal Analysis of Traction MotorsDocument11 pagesA Review of Structural and Thermal Analysis of Traction MotorsGari PastranaNo ratings yet
- Reliability Evaluation of Seig Rotor Core Magnetization With Minimum Capacitive Excitation For Unregulated Renewable Energy Applications in Remote AreasDocument7 pagesReliability Evaluation of Seig Rotor Core Magnetization With Minimum Capacitive Excitation For Unregulated Renewable Energy Applications in Remote AreasLokeshVarshneyNo ratings yet
- PM BLDC RatingsDocument7 pagesPM BLDC RatingsBHARDA KUNJNo ratings yet
- Energies 15 03564Document21 pagesEnergies 15 03564SuriyakumarNo ratings yet
- An Unequal Split Dual Three-Phase PMSM With Extended Torque-Speed Characteristics For Automotive ApplicationDocument13 pagesAn Unequal Split Dual Three-Phase PMSM With Extended Torque-Speed Characteristics For Automotive ApplicationShovan DeyNo ratings yet
- Wound Rotor Machine With Single-Phase Stator and Three-Phase Rotor Windings Controlled by Isolated Three-Phase InverterDocument11 pagesWound Rotor Machine With Single-Phase Stator and Three-Phase Rotor Windings Controlled by Isolated Three-Phase InverterBook4AllNo ratings yet
- Advanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitDocument13 pagesAdvanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitShivaram H GNo ratings yet
- Electrical Design of High-Speed Induction Motors Up to 15 MW 20000 RPMDocument7 pagesElectrical Design of High-Speed Induction Motors Up to 15 MW 20000 RPMzachxie100% (1)
- 2001 DE Propulsion TheoryDocument33 pages2001 DE Propulsion TheoryFrancis TanNo ratings yet
- Car Examples ComparisonDocument14 pagesCar Examples ComparisonNigamanand RaoNo ratings yet
- 02 - Analysis and Verification of The Doubly SalientDocument9 pages02 - Analysis and Verification of The Doubly SalientbadaitimurNo ratings yet
- High-Torque Motor For A Gearless Electromechanical Actuator: F.R. Ismagilov V.E. Vavilov I.F. SayakhovDocument5 pagesHigh-Torque Motor For A Gearless Electromechanical Actuator: F.R. Ismagilov V.E. Vavilov I.F. SayakhovMano DanoNo ratings yet
- A Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandDocument8 pagesA Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandsouravghimireyNo ratings yet
- Development of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IDocument4 pagesDevelopment of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IKapish SharmaNo ratings yet
- Ac Drives ThesisDocument5 pagesAc Drives Thesiselenaelmonte100% (2)
- Bidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesDocument6 pagesBidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesOscar Olarte OrtizNo ratings yet
- Tpel 2017 2735905Document8 pagesTpel 2017 2735905Ali Tahami-Pour zarandiNo ratings yet
- Title of The Project: Pragati Engineering College (Autonomous)Document13 pagesTitle of The Project: Pragati Engineering College (Autonomous)Lucky AbhiNo ratings yet
- Applied Energy: SciencedirectDocument13 pagesApplied Energy: SciencedirectImmawan InsaniNo ratings yet
- Energies 15 00694 With CoverDocument18 pagesEnergies 15 00694 With Coverpdseetharam009No ratings yet
- Energies 15 08323Document38 pagesEnergies 15 08323Bia HaithemNo ratings yet
- Controlled Dynamic Braking For Switched Reluctance Motor Drives With ADocument7 pagesControlled Dynamic Braking For Switched Reluctance Motor Drives With A912057379No ratings yet
- Single Switch DC-DC Converter For Battery Feed Electrical VehicleDocument19 pagesSingle Switch DC-DC Converter For Battery Feed Electrical VehicleResearch ParkNo ratings yet
- Diesel Electric Locomotive ComponentsDocument10 pagesDiesel Electric Locomotive Componentssimbairvine23No ratings yet
- Ahmed 2009Document5 pagesAhmed 2009moorpvrNo ratings yet
- Qi2020 Article DesignAndResearchOfDeepSlotUniDocument13 pagesQi2020 Article DesignAndResearchOfDeepSlotUniArunNo ratings yet
- Design Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEADocument5 pagesDesign Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEASuman SahaNo ratings yet
- Wireless Charging SystemDocument25 pagesWireless Charging SystemWENZE LYUNo ratings yet
- Speed Control and Electrical Braking of Axial Ux BLDC MotorDocument7 pagesSpeed Control and Electrical Braking of Axial Ux BLDC MotorPanser PangaribuanNo ratings yet
- C1201042329 PDFDocument7 pagesC1201042329 PDFJOHN MINKHANTNo ratings yet
- Modeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyDocument7 pagesModeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyJOHN MINKHANTNo ratings yet
- Fan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEDocument13 pagesFan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEMarcelo Vinicius de PaulaNo ratings yet
- Highly Efficient Brushless Motor DesignDocument6 pagesHighly Efficient Brushless Motor Designrakeshee2007No ratings yet
- A Survey of Concepts For Electric Propulsion in Conventional & Ice Breaking OSVsDocument19 pagesA Survey of Concepts For Electric Propulsion in Conventional & Ice Breaking OSVsThomas StNo ratings yet
- Regenerative Braking StategyDocument10 pagesRegenerative Braking StategyAshwin SelvakumarNo ratings yet
- Effect of Transmission Design On Electric Vehicle (EV) PerformanceDocument6 pagesEffect of Transmission Design On Electric Vehicle (EV) PerformanceSwati NikamNo ratings yet
- Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives For EV and HEV ApplicationsDocument10 pagesComparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives For EV and HEV Applicationskhodabandelou100% (1)
- Thesis On Speed Control of Induction MotorDocument4 pagesThesis On Speed Control of Induction Motorbk1hxs86100% (2)
- Speed Control of Brushless DC Motor Using Zeta ConverterDocument7 pagesSpeed Control of Brushless DC Motor Using Zeta ConverterRicard Alfredo PurbaNo ratings yet
- Hybrid Energy Storage System For Electric Vehicle: Helix Vol. 9 (6) : 5801-5805 DOI 10.29042/2019-5801-5805Document5 pagesHybrid Energy Storage System For Electric Vehicle: Helix Vol. 9 (6) : 5801-5805 DOI 10.29042/2019-5801-5805AswinNo ratings yet
- Elevator Based BLDCDocument9 pagesElevator Based BLDCsathishNo ratings yet
- Simulation & Fabrication of Axial Flux Brushless DC Motor DriveDocument7 pagesSimulation & Fabrication of Axial Flux Brushless DC Motor DrivePanser PangaribuanNo ratings yet
- A 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargeDocument16 pagesA 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargePRAMOD PATIDARNo ratings yet
- Critical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesDocument12 pagesCritical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesFrankenstein ReichNo ratings yet
- Speed Control of Electric Vehicle: January 2016Document3 pagesSpeed Control of Electric Vehicle: January 2016Mohammed Al-OdatNo ratings yet
- A Brushless DC Motor Design For An Aircraft Electro-Hydraulic Actuation SystemDocument6 pagesA Brushless DC Motor Design For An Aircraft Electro-Hydraulic Actuation Systemrenyo1No ratings yet
- Modified Switching Table Based Direct Torque Control of Six Phase Induction Motor DriveDocument14 pagesModified Switching Table Based Direct Torque Control of Six Phase Induction Motor DriveAhmet GündoğduNo ratings yet
- 1 ADocument12 pages1 Asharjeel hassanNo ratings yet
- Traction Motors and Speed Estimation Techniques For Sensorless Control of Electric Vehicles: A ReviewDocument6 pagesTraction Motors and Speed Estimation Techniques For Sensorless Control of Electric Vehicles: A ReviewShovan DeyNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument37 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsShovan DeyNo ratings yet
- Thermal Analysis of Multibarrier Interior PM Synchronous Machine Using Lumped Parameter ModelDocument7 pagesThermal Analysis of Multibarrier Interior PM Synchronous Machine Using Lumped Parameter ModelShovan DeyNo ratings yet
- Optimization For Reduction of Torque Ripple in An AFPM MachineDocument4 pagesOptimization For Reduction of Torque Ripple in An AFPM MachineJunaid IkramNo ratings yet
- Xia2015 Opt IPM TagiDocument9 pagesXia2015 Opt IPM TagiShovan DeyNo ratings yet
- (Open Physics) A Novel Hybrid Genetic Algorithm For Optimal Design of IPM Machines For Electric VehicleDocument8 pages(Open Physics) A Novel Hybrid Genetic Algorithm For Optimal Design of IPM Machines For Electric VehicleShovan DeyNo ratings yet
- An Unequal Split Dual Three-Phase PMSM With Extended Torque-Speed Characteristics For Automotive ApplicationDocument13 pagesAn Unequal Split Dual Three-Phase PMSM With Extended Torque-Speed Characteristics For Automotive ApplicationShovan DeyNo ratings yet
- Electrical Machine Topologies: Hottest Topics in The Electrical Machine Research CommunityDocument14 pagesElectrical Machine Topologies: Hottest Topics in The Electrical Machine Research CommunityShovan DeyNo ratings yet
- Jang, Cho, Choi - 2007 - Design and Analysis of A High-Speed Brushless DC Motor For Centrifugal CompressorDocument3 pagesJang, Cho, Choi - 2007 - Design and Analysis of A High-Speed Brushless DC Motor For Centrifugal CompressormitulNo ratings yet
- Mathematical and Computational Applications ReviewDocument18 pagesMathematical and Computational Applications ReviewShovan DeyNo ratings yet
- Brushless Machines Considering Mechanical Constraints.: ArticleDocument12 pagesBrushless Machines Considering Mechanical Constraints.: ArticleShovan DeyNo ratings yet
- Braking Torque Analysis of The Single Phase Line-Start Permanent Magnet Synchronous MotorDocument5 pagesBraking Torque Analysis of The Single Phase Line-Start Permanent Magnet Synchronous MotorShovan DeyNo ratings yet
- Design, Prototyping, and Analysis of A Novel Modular Permanent-Magnet Transverse Flux Disk GeneratorDocument9 pagesDesign, Prototyping, and Analysis of A Novel Modular Permanent-Magnet Transverse Flux Disk GeneratorShovan DeyNo ratings yet
- InformationDocument17 pagesInformationma ka khana khajanaNo ratings yet
- Csir SRF NotificationDocument7 pagesCsir SRF NotificationDeeksha MishraNo ratings yet
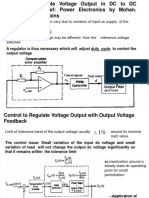
- Prasid Shyam 1014 - SMPS - ControlDocument29 pagesPrasid Shyam 1014 - SMPS - ControlShovan DeyNo ratings yet
- Jrfgate PDFDocument3 pagesJrfgate PDFShovan DeyNo ratings yet
- Tms 320 F 28379 DDocument222 pagesTms 320 F 28379 DJuan Ku LosanoNo ratings yet
- Academic Calender Even 2019 20 PDFDocument1 pageAcademic Calender Even 2019 20 PDFShovan DeyNo ratings yet
- Application For Teaching Fellows (Temporary Ref: Advertisement No.001/2019 /MIT/Teaching Fellows Dated:22.11.2019Document4 pagesApplication For Teaching Fellows (Temporary Ref: Advertisement No.001/2019 /MIT/Teaching Fellows Dated:22.11.2019Shovan DeyNo ratings yet
- Detailed-Advertisement - for-Apprentice-Engagement - Western-Region - 2019-'20-1st-Cycle PDFDocument7 pagesDetailed-Advertisement - for-Apprentice-Engagement - Western-Region - 2019-'20-1st-Cycle PDFVeerpratap SinghNo ratings yet
- Buck Snubber App-EDocument6 pagesBuck Snubber App-EShovan DeyNo ratings yet
- Fundamentals of Power Electronics 2e (Robert W. Erickson)Document900 pagesFundamentals of Power Electronics 2e (Robert W. Erickson)Gaurav KumarNo ratings yet
- Operation and ResearchDocument246 pagesOperation and ResearchShovan DeyNo ratings yet
- Examen Tema 3 Ingles EnzoDocument3 pagesExamen Tema 3 Ingles EnzoMartinEnzo GuerraNo ratings yet
- Carte Tehnica Panou Solar Cu Celule Monocristaline SunPower 345 WDocument4 pagesCarte Tehnica Panou Solar Cu Celule Monocristaline SunPower 345 WphatdoggNo ratings yet
- Aviation Forecasting Techniques - Sem 3 - MBA AviationDocument109 pagesAviation Forecasting Techniques - Sem 3 - MBA AviationAmit SharmaNo ratings yet
- Snelgrove Language and Language Development Fianl ProjectDocument4 pagesSnelgrove Language and Language Development Fianl Projectapi-341640365No ratings yet
- Psy2365 7743Document4 pagesPsy2365 7743John Linel D. DakingkingNo ratings yet
- Conditions of Contract For: ConstructionDocument30 pagesConditions of Contract For: Constructionvladimir100% (2)
- Ms. Irish Lyn T. Alolod Vi-AdviserDocument17 pagesMs. Irish Lyn T. Alolod Vi-AdviserIrish Lyn Alolod Cabilogan100% (1)
- PI2016 - Geotechnical Characterization of Clearwater Shales For DesignDocument8 pagesPI2016 - Geotechnical Characterization of Clearwater Shales For DesignmauricioNo ratings yet
- Work Permit ManualDocument20 pagesWork Permit ManualRoni EnjelaniNo ratings yet
- PRODUCT DATA SHEET CCT15854Document1 pagePRODUCT DATA SHEET CCT15854Miloš AćimovacNo ratings yet
- 4 Strategies To Unlock Performance Management Constraints HFMDocument6 pages4 Strategies To Unlock Performance Management Constraints HFMajay kumarNo ratings yet
- Basic Accounting Lecture 05202018Document188 pagesBasic Accounting Lecture 05202018Rheea de los SantosNo ratings yet
- Julie Craven ResumeDocument3 pagesJulie Craven Resumeapi-469430606No ratings yet
- Macroeconomics Dde PDFDocument253 pagesMacroeconomics Dde PDFPankaj GahlautNo ratings yet
- Long Term Recommendation Bata India LTD.: The Growth SprintDocument38 pagesLong Term Recommendation Bata India LTD.: The Growth SprintPANo ratings yet
- HSC Blade Runner & Frankenstein EssayDocument2 pagesHSC Blade Runner & Frankenstein EssayAsha Forsyth100% (1)
- Simple Steel BridgeDocument2 pagesSimple Steel BridgeAnonymous 1GK9Hxp5YKNo ratings yet
- Conway - On Unsettleable Arithmetical ProblemsDocument8 pagesConway - On Unsettleable Arithmetical ProblemsfreafreafreaNo ratings yet
- Talent ManagementDocument8 pagesTalent Managementyared haftuNo ratings yet
- What is Meningitis? Understanding Causes, Symptoms and TreatmentDocument15 pagesWhat is Meningitis? Understanding Causes, Symptoms and Treatmentnaveen chaudharyNo ratings yet
- Macro PerspectiveDocument3 pagesMacro PerspectiveMARITONI MEDALLANo ratings yet
- N039-N040 Rejano Nursing Care PlanDocument3 pagesN039-N040 Rejano Nursing Care PlanBianca Marithè RejanoNo ratings yet
- Chapter5 EthDocument30 pagesChapter5 EthVictoriasecret PerfumeNo ratings yet
- Presentation1 150221070554 Conversion Gate01Document75 pagesPresentation1 150221070554 Conversion Gate01yellymarlianapatuNo ratings yet
- Roulette WarfareDocument2 pagesRoulette WarfareAsteboNo ratings yet
- Skema Pppa Kimia k2 2014 (Set 1)Document10 pagesSkema Pppa Kimia k2 2014 (Set 1)Siva Guru0% (1)
- Excel 2003 - CompleteDocument387 pagesExcel 2003 - CompleteRazvan PetrariuNo ratings yet