You might also like
- Design of On-Board Charger For Plug-In Hybrid Electric VehicleDocument6 pagesDesign of On-Board Charger For Plug-In Hybrid Electric VehicleFaixan ArshadNo ratings yet
- DGAEJ-Uzma PaperDocument20 pagesDGAEJ-Uzma PaperFARHAD ILAHI BakhshNo ratings yet
- Power Management Strategy To Enhance Drive Range of Electric BicycleDocument7 pagesPower Management Strategy To Enhance Drive Range of Electric BicycleAnonymous DbmKEDxNo ratings yet
- Development of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IDocument4 pagesDevelopment of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IKapish SharmaNo ratings yet
- Bidirectional Isolated DC-DC Converter For Hybrid Electric Vehicle ChargingDocument9 pagesBidirectional Isolated DC-DC Converter For Hybrid Electric Vehicle ChargingIJSREDNo ratings yet
- Simulation of Hybrid Vehicle Using Multi-Boost ConverterDocument24 pagesSimulation of Hybrid Vehicle Using Multi-Boost Converterఆర్ బి నాయక్No ratings yet
- Multiphase Bidirectional Flyback Converter PDFDocument7 pagesMultiphase Bidirectional Flyback Converter PDFArceu CamposNo ratings yet
- DC-DC Converter For EVDocument6 pagesDC-DC Converter For EVSachin AngadiNo ratings yet
- Development of A Bidirectional DC-DC Converter With Dual-Battery Energy Storage For A Hybrid Electric Vehicle SystemDocument22 pagesDevelopment of A Bidirectional DC-DC Converter With Dual-Battery Energy Storage For A Hybrid Electric Vehicle SystemIJRASETPublicationsNo ratings yet
- EV Seminar Report Explores Charging Systems and TechnologiesDocument20 pagesEV Seminar Report Explores Charging Systems and TechnologiesClassic PrintersNo ratings yet
- Literature Review of BLDCDocument6 pagesLiterature Review of BLDCsushil63666No ratings yet
- Design and Implementation of Hybrid Energy Storage System ......Document8 pagesDesign and Implementation of Hybrid Energy Storage System ......GALLEGO LUPIANEZNo ratings yet
- Single Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghDocument14 pagesSingle Phase Low Voltage Charger For Electric Vehicles: Er. Gaurav Sharma & Er. Harkamal Deep SinghTJPRC PublicationsNo ratings yet
- Control of BLDC Motor and Regenerative Braking in Electric VehicleDocument6 pagesControl of BLDC Motor and Regenerative Braking in Electric VehicleIJRASETPublicationsNo ratings yet
- Helpful Hints To Enhance Reliability of DC-DC Converters in Hybrid Electric Vehicle ApplicationsDocument6 pagesHelpful Hints To Enhance Reliability of DC-DC Converters in Hybrid Electric Vehicle ApplicationsJyothiPunemNo ratings yet
- hegazy2011Document7 pageshegazy2011Harshal VaidyaNo ratings yet
- 2022-V13I6050Document8 pages2022-V13I6050Harshal VaidyaNo ratings yet
- Design of Buck Boost Converter Final Thesis PDFDocument53 pagesDesign of Buck Boost Converter Final Thesis PDFSusiNo ratings yet
- Dynamic Control of Traction Motor For EV Fed Via DDocument18 pagesDynamic Control of Traction Motor For EV Fed Via Dtengfei.sunNo ratings yet
- DC/DC Converters For Electric Vehicles: Monzer Al Sakka, Joeri Van Mierlo and Hamid GualousDocument25 pagesDC/DC Converters For Electric Vehicles: Monzer Al Sakka, Joeri Van Mierlo and Hamid Gualousme_droidNo ratings yet
- Energy Management of PEM Fuel Cell/ Supercapacitor Hybrid Power Sources For An Electric VehicleDocument9 pagesEnergy Management of PEM Fuel Cell/ Supercapacitor Hybrid Power Sources For An Electric VehicleSidahmed LarbaouiNo ratings yet
- Centralized Hybrid Power Generation by A Regenerative MethodDocument12 pagesCentralized Hybrid Power Generation by A Regenerative MethodDhanush NNo ratings yet
- Design of Buck Boost Converter - Final ThesisDocument53 pagesDesign of Buck Boost Converter - Final ThesisVikrant VishalNo ratings yet
- Hybrid Bicycle: Basil P Elias, Dino Devassykutty, John George, Akhila KDocument5 pagesHybrid Bicycle: Basil P Elias, Dino Devassykutty, John George, Akhila KStephin JanvelNo ratings yet
- V4i3 1616 PDFDocument6 pagesV4i3 1616 PDFjoy 11No ratings yet
- Batch 4Document58 pagesBatch 4AJAY KUMAR GODANo ratings yet
- 1 s2.0 S2405844023060164 MainDocument35 pages1 s2.0 S2405844023060164 MainFAUSTO JAVIER ZAPA PEREZNo ratings yet
- Power Converter Circuits For Recuperation of The Regenerative Braking Energy in Rail VehiclesDocument6 pagesPower Converter Circuits For Recuperation of The Regenerative Braking Energy in Rail VehiclesSilvestarNo ratings yet
- IJCRT2203414Document5 pagesIJCRT2203414bartolomeuzNo ratings yet
- A Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesDocument4 pagesA Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesGabriel de SáNo ratings yet
- Title of The Project: Pragati Engineering College (Autonomous)Document13 pagesTitle of The Project: Pragati Engineering College (Autonomous)Lucky AbhiNo ratings yet
- Pass Kerva de BssDocument5 pagesPass Kerva de BssDevang TripathiNo ratings yet
- Loss Analysis of Non-Isolated Bidirectional DC/DC Converters For Hybrid Energy Storage System in EvsDocument7 pagesLoss Analysis of Non-Isolated Bidirectional DC/DC Converters For Hybrid Energy Storage System in EvsManu HPérezNo ratings yet
- DC To DC For Solar Powered Electric Vehicle PlagiarismDocument10 pagesDC To DC For Solar Powered Electric Vehicle PlagiarismNandhakumar NANDYNo ratings yet
- A Review of Unidirectional AC-DC Converter Topologies For Level-1 Charging of Electric VehiclesDocument22 pagesA Review of Unidirectional AC-DC Converter Topologies For Level-1 Charging of Electric VehiclesIlie CosminNo ratings yet
- Pedl Exp 4Document8 pagesPedl Exp 4Tejas MayekarNo ratings yet
- Cascaded Multiport Converter For SRM Based Hybrid Electrical VehicleDocument8 pagesCascaded Multiport Converter For SRM Based Hybrid Electrical VehicleEditor IJTSRDNo ratings yet
- 2020 - Fast Charging Converter and Control Algorithm For Solar PV BatteryDocument13 pages2020 - Fast Charging Converter and Control Algorithm For Solar PV BatteryAchyut Narayan HNo ratings yet
- Modelling and Simulation of Vehicle Electric Power SystemDocument9 pagesModelling and Simulation of Vehicle Electric Power Systemk.nidharaNo ratings yet
- An Improved SOC Control Strategy For EleDocument13 pagesAn Improved SOC Control Strategy For EleemrahNo ratings yet
- Hybrid Electric VehicleDocument17 pagesHybrid Electric VehicleEEE_ProceedingsNo ratings yet
- Bidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesDocument6 pagesBidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesOscar Olarte OrtizNo ratings yet
- Single Switch DC-DC Converter For Battery Feed Electrical VehicleDocument19 pagesSingle Switch DC-DC Converter For Battery Feed Electrical VehicleResearch ParkNo ratings yet
- 12th Evaluation Ahmed Samy 17105552Document14 pages12th Evaluation Ahmed Samy 17105552Ahmed Samy El GoharyNo ratings yet
- Solar and Battery Input Super-Boost DC-DC Converter For Solar Powered Electric VehicleDocument8 pagesSolar and Battery Input Super-Boost DC-DC Converter For Solar Powered Electric VehicleNandhakumar NANDYNo ratings yet
- Grid and Solar Photovoltaic Sources Assisted Charging System For Electric VehiclesDocument12 pagesGrid and Solar Photovoltaic Sources Assisted Charging System For Electric VehiclesIJRASETPublicationsNo ratings yet
- Hybrid Electric Vehcile - Dinesh KumarDocument5 pagesHybrid Electric Vehcile - Dinesh KumarDivaharan CNo ratings yet
- Wavelet-Transform Based EnergyDocument7 pagesWavelet-Transform Based EnergyАлексей ЯмаNo ratings yet
- Journal of Power Sources: Lia Kouchachvili, Wahiba Yaïci, Evgueniy EntchevDocument12 pagesJournal of Power Sources: Lia Kouchachvili, Wahiba Yaïci, Evgueniy EntchevAnthony John PeregrinaNo ratings yet
- The PEM Fuel Cell System With DC/DC Boost Converter: Design, Modeling and SimulationDocument5 pagesThe PEM Fuel Cell System With DC/DC Boost Converter: Design, Modeling and SimulationIDESNo ratings yet
- Chapter 5Document7 pagesChapter 5surendraNo ratings yet
- E3sconf SeFet2019 01029Document6 pagesE3sconf SeFet2019 01029DONE AND DUSTEDNo ratings yet
- Simulation Analysis of Battery/Ultracapacitor Hybrid Energy Storage System for Electric VehiclesDocument5 pagesSimulation Analysis of Battery/Ultracapacitor Hybrid Energy Storage System for Electric VehiclesVaishal GoswamiNo ratings yet
- A Power-Factor-Corrected LLC Resonant Converter For Electric Vehicle Charger Using Cuk ConverterDocument9 pagesA Power-Factor-Corrected LLC Resonant Converter For Electric Vehicle Charger Using Cuk ConverterAsha C ANo ratings yet
- Design of Electric Vehicle: A Real Time Case Study: V.Suresh Kumar B. DeviDocument14 pagesDesign of Electric Vehicle: A Real Time Case Study: V.Suresh Kumar B. DeviChandrasekaran NNo ratings yet
- Hev M3Document17 pagesHev M3Anandhu ANo ratings yet
- Cuk Pap - 1Document9 pagesCuk Pap - 1Muhammad Haris MohsinNo ratings yet
- E BikeDocument7 pagesE Bikevivek choudharyNo ratings yet
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDocument6 pagesOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNo ratings yet
- Facilities ManagementDocument23 pagesFacilities ManagementAhmed SamyNo ratings yet
- AocvDocument5 pagesAocvgowripNo ratings yet
- FdeosinfoDocument18 pagesFdeosinfowhacky LiloNo ratings yet
- AnnabellaBracco Resume 2021Document1 pageAnnabellaBracco Resume 2021ANNABELLA BRACCONo ratings yet
- GHG 2014 Electrical Guide M2Document46 pagesGHG 2014 Electrical Guide M2cristian picado100% (3)
- 21st Century TunaDocument9 pages21st Century Tunabiananaa14No ratings yet
- Silcostart: Static Motor Softstarter Solving Starting ProblemsDocument4 pagesSilcostart: Static Motor Softstarter Solving Starting ProblemsMohamed AlkharashyNo ratings yet
- VMware Compatibility Guide Servidores DELL R720 - Vmware 6.5Document2 pagesVMware Compatibility Guide Servidores DELL R720 - Vmware 6.5Emanuel TavaresNo ratings yet
- Statement For The Record C. Paul Robinson, Director Sandia National LaboratoriesDocument21 pagesStatement For The Record C. Paul Robinson, Director Sandia National Laboratoriessandia_docsNo ratings yet
- Malicious Behavior Detection Using Windows Audit LogsDocument10 pagesMalicious Behavior Detection Using Windows Audit LogsFrancisco BuenoNo ratings yet
- Pelton Turbine Operation and DesignDocument22 pagesPelton Turbine Operation and DesignManuel CaipoNo ratings yet
- Lycoming Engine Order Form: (If Different)Document2 pagesLycoming Engine Order Form: (If Different)Michel LefebvreNo ratings yet
- CN8001 PacketCraftingUsingScapy WilliamZerenehDocument0 pagesCN8001 PacketCraftingUsingScapy WilliamZerenehJosh Meier MartinNo ratings yet
- Rizwan Habib / Roll - 131: Online Travel Agency (OTA)Document13 pagesRizwan Habib / Roll - 131: Online Travel Agency (OTA)rizwan_habibNo ratings yet
- Guidelines For Passenger Services at European AirportsDocument120 pagesGuidelines For Passenger Services at European AirportsJPFJ12100% (2)
- Carbon Dioxide Co2 Fire ExtinguisherDocument1 pageCarbon Dioxide Co2 Fire ExtinguisherBinod KumarNo ratings yet
- CDJ-350-W: Multi PlayerDocument4 pagesCDJ-350-W: Multi Playerdjdhemitz100% (1)
- Cisco Intersight HandbookDocument409 pagesCisco Intersight HandbookHsueh KevinNo ratings yet
- MWL315 C, CE, CEP, CL, CEL, CA, CEA Etc. CNC Wood Lathe Price List From Jinan MastecDocument11 pagesMWL315 C, CE, CEP, CL, CEL, CA, CEA Etc. CNC Wood Lathe Price List From Jinan MastecJuan Martín Montes NeriNo ratings yet
- Growatt SPF3000TL-HVM (2020)Document2 pagesGrowatt SPF3000TL-HVM (2020)RUNARUNNo ratings yet
- CIS RAM For IG1 Workbook v21.10.25Document144 pagesCIS RAM For IG1 Workbook v21.10.25pikanteNo ratings yet
- Design Solar SystemDocument11 pagesDesign Solar Systemjames ramNo ratings yet
- Quality AssuranceDocument6 pagesQuality AssuranceعلاءإدريسNo ratings yet
- UML Sequence Diagram ExplainedDocument24 pagesUML Sequence Diagram ExplainedMuhammad Nauman AkramNo ratings yet
- Huawei CloudEngine S5731-H Series Switches BrochureDocument13 pagesHuawei CloudEngine S5731-H Series Switches BrochureMurillo SilvaNo ratings yet
- P2131 - A00 GK208 GDDR5 256X32Bit: DescriptionDocument16 pagesP2131 - A00 GK208 GDDR5 256X32Bit: DescriptionCarlosBayonaMontenegroNo ratings yet
- Unit-4 - KOE062 Embededded System MaterialsDocument38 pagesUnit-4 - KOE062 Embededded System MaterialsRishabh PrasadNo ratings yet
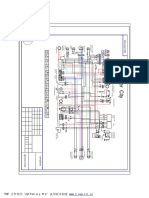
- Cpi Oliver City EldiagramDocument1 pageCpi Oliver City EldiagramHenry BraunNo ratings yet
- Boolean Searching LessonDocument14 pagesBoolean Searching LessonPradeep Dhar100% (1)
- ROKS KPI Canvas - ExcelDocument2 pagesROKS KPI Canvas - ExcelwhauckNo ratings yet