You might also like
- LM324Document6 pagesLM324alllim88No ratings yet
- LM324N Fairchild Datasheet 7616280Document13 pagesLM324N Fairchild Datasheet 7616280alllim88No ratings yet
- Hgsemi-Lm324n C725320Document4 pagesHgsemi-Lm324n C725320alllim88No ratings yet
- Please Note That Cypress Is An Infineon Technologies CompanyDocument46 pagesPlease Note That Cypress Is An Infineon Technologies Companyalllim88No ratings yet
- r103cDocument4 pagesr103calllim88No ratings yet
- XC9110 XC9111Document35 pagesXC9110 XC9111alllim88No ratings yet
- LM123/LM323A/LM323-N 3-Amp, 5-Volt Positive Regulator: FeaturesDocument14 pagesLM123/LM323A/LM323-N 3-Amp, 5-Volt Positive Regulator: Featuresalllim88No ratings yet
- Hall Effect Current Sensor L05Z800S15: SpecificationsDocument2 pagesHall Effect Current Sensor L05Z800S15: Specificationsalllim88No ratings yet
- AC Motor Controller With VCLDocument7 pagesAC Motor Controller With VCLalllim88No ratings yet
- ON Semiconductor Is Now: To Learn More About Onsemi™, Please Visit Our Website atDocument11 pagesON Semiconductor Is Now: To Learn More About Onsemi™, Please Visit Our Website atalllim88No ratings yet
- FQP5N50C/FQPF5N50C: 500V N-Channel MOSFETDocument10 pagesFQP5N50C/FQPF5N50C: 500V N-Channel MOSFETalllim88No ratings yet
- D D D D D D D: SN54HCT04, SN74HCT04 Hex InvertersDocument21 pagesD D D D D D D: SN54HCT04, SN74HCT04 Hex Invertersalllim88No ratings yet
- A B J G H A B J G H: HR3651, HR3652, HR3653, HR3655, HR3656, HR3657, HR3658, HR3663, HR3664Document106 pagesA B J G H A B J G H: HR3651, HR3652, HR3653, HR3655, HR3656, HR3657, HR3658, HR3663, HR3664alllim88No ratings yet
- Silicon Carbide Power MOSFET C3M MOSFET Technology: N-Channel Enhancement ModeDocument10 pagesSilicon Carbide Power MOSFET C3M MOSFET Technology: N-Channel Enhancement Modealllim88No ratings yet
- N-Channel 900 V, 1.56 Ω Typ., 5.8 A Supermesh™ Power Mosfet Ind Pak, To-220, To-220Fp And To-247 PackagesDocument26 pagesN-Channel 900 V, 1.56 Ω Typ., 5.8 A Supermesh™ Power Mosfet Ind Pak, To-220, To-220Fp And To-247 Packagesalllim88No ratings yet
- Littelfuse Discrete Mosfets N-Channel Standard Ixt 6n120 Datasheet PDFDocument5 pagesLittelfuse Discrete Mosfets N-Channel Standard Ixt 6n120 Datasheet PDFalllim88No ratings yet
- Mosfet: NTD14N03R, NVD14N03R - Power, N-Channel, DPAKDocument7 pagesMosfet: NTD14N03R, NVD14N03R - Power, N-Channel, DPAKalllim88No ratings yet
- Smps Mosfet: IRF3704 IRF3704S IRF3704LDocument11 pagesSmps Mosfet: IRF3704 IRF3704S IRF3704Lalllim88No ratings yet
- Csd17507Q5A 30-V N-Channel Nexfet™ Power Mosfet: 1 FeaturesDocument14 pagesCsd17507Q5A 30-V N-Channel Nexfet™ Power Mosfet: 1 Featuresalllim88No ratings yet
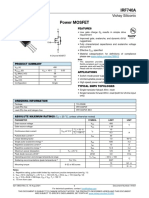
- IRF740A: Vishay SiliconixDocument8 pagesIRF740A: Vishay Siliconixalllim88No ratings yet
- NTB5860NL, NTP5860NL, NVB5860NL N-Channel Power MOSFET: 60 V, 220 A, 3.0 MWDocument9 pagesNTB5860NL, NTP5860NL, NVB5860NL N-Channel Power MOSFET: 60 V, 220 A, 3.0 MWalllim88No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- LR001 SLAMTEC Rplidar Protocol v2.2 enDocument50 pagesLR001 SLAMTEC Rplidar Protocol v2.2 enrNo ratings yet
- Remote Sensing: An Application Oriented Scan-to-BIM FrameworkDocument27 pagesRemote Sensing: An Application Oriented Scan-to-BIM FrameworkMehdi RezougNo ratings yet
- Followercart ReportDocument93 pagesFollowercart ReportEngineer Asma SaroujiNo ratings yet
- A Guide On How To Properly Annotate Keypoints Whale TasksDocument24 pagesA Guide On How To Properly Annotate Keypoints Whale TasksJoshua KiokoNo ratings yet
- Electro Optics - Apr19 PDFDocument36 pagesElectro Optics - Apr19 PDFcoerenciaceNo ratings yet
- SIRADEL MMW Propagation 2Document11 pagesSIRADEL MMW Propagation 2Prabhakar SinghNo ratings yet
- The Robotic Forklift Guide - Prot PDFDocument45 pagesThe Robotic Forklift Guide - Prot PDFDaffa HermansyahNo ratings yet
- Graduation Report TemplateDocument12 pagesGraduation Report TemplateĐình PhướcNo ratings yet
- Horizontal Accuracy Reporting For Lidar DataDocument63 pagesHorizontal Accuracy Reporting For Lidar DataAndronescu ClaudiuNo ratings yet
- Natural Power ZephIR Brochure EDocument17 pagesNatural Power ZephIR Brochure EJaime PeñaNo ratings yet
- 2017 Book LearningLandscapeEcology PDFDocument349 pages2017 Book LearningLandscapeEcology PDFCINDYNo ratings yet
- Micro SeismicDocument2 pagesMicro SeismicYesyurun SetyanisaNo ratings yet
- Electronic Design FocusOnAutoCommunicationsEbook PDFDocument24 pagesElectronic Design FocusOnAutoCommunicationsEbook PDFhfalanizNo ratings yet
- 3 DemDocument66 pages3 DemortodromaNo ratings yet
- Geology Digital Age Proceedings MAEGS17201109 X 5Document290 pagesGeology Digital Age Proceedings MAEGS17201109 X 5mercysdosNo ratings yet
- Topographic Laser Ranging and Scanning (2009)Document593 pagesTopographic Laser Ranging and Scanning (2009)José Roberto Pedrosa80% (5)
- Tutorial For Processing LiDAR Datasets and Visualization (For Slovenian Lidar)Document13 pagesTutorial For Processing LiDAR Datasets and Visualization (For Slovenian Lidar)ksk upNo ratings yet
- Ozone PhysicsDocument16 pagesOzone Physicsiflixid01No ratings yet
- Precast Concrete Literature ReviewDocument4 pagesPrecast Concrete Literature Reviewfihynakalej2100% (1)
- Drone-Based Reconstruction For 3D Geospatial Data ProcessingDocument6 pagesDrone-Based Reconstruction For 3D Geospatial Data ProcessingHariharan NairNo ratings yet
- Indian Institute of Technology, Kanpur: Dr. Gaurav Pandey, Dr. Mangal Kothari, Dr. S R SahooDocument18 pagesIndian Institute of Technology, Kanpur: Dr. Gaurav Pandey, Dr. Mangal Kothari, Dr. S R SahooHarsh SinhaNo ratings yet
- Structural Design of Bunkers - Procedure and Design ConsiderationsDocument8 pagesStructural Design of Bunkers - Procedure and Design Considerationsenterlog100% (1)
- 1652789.Nguyễn Đình Nguyên Vũ PDFDocument94 pages1652789.Nguyễn Đình Nguyên Vũ PDFsondoan.bkdecNo ratings yet
- Airborne Laser Scanning Basic Relations and Formulas 199-214Document16 pagesAirborne Laser Scanning Basic Relations and Formulas 199-214Grzegorz BrzęczyszczykiewiczNo ratings yet
- Proceedings IUFRO 3.06 NorwayDocument128 pagesProceedings IUFRO 3.06 NorwayBqdcc6No ratings yet
- Plant Detection and Mapping For Agricultural Robots Using A 3D LIDAR SensorDocument9 pagesPlant Detection and Mapping For Agricultural Robots Using A 3D LIDAR SensorManar HosnyNo ratings yet
- (IJCST-V10I4P18) :fatima Ibrahim Abdelmoutalib, Dieter FritschDocument10 pages(IJCST-V10I4P18) :fatima Ibrahim Abdelmoutalib, Dieter FritschEighthSenseGroupNo ratings yet
- Geoinformatics 2008 Vol06Document84 pagesGeoinformatics 2008 Vol06protogeografoNo ratings yet
- Adding An RP LiDAR Onto The DJI Matrice 100 Drone To Implement Obstacle AvoidanceDocument14 pagesAdding An RP LiDAR Onto The DJI Matrice 100 Drone To Implement Obstacle AvoidanceAdam Wathieu100% (1)
- Structural Data Bias in The Digital Age: M.J. Fowler Pells Sullivan Meynink, AustraliaDocument9 pagesStructural Data Bias in The Digital Age: M.J. Fowler Pells Sullivan Meynink, AustraliaSergio CastroNo ratings yet