You might also like
- RR Trent 60Document39 pagesRR Trent 60Ricardo Cabrera Osinaga100% (6)
- Principal Hypotheses and Assumptions in Strength of MaterialsDocument9 pagesPrincipal Hypotheses and Assumptions in Strength of MaterialsJason Ross100% (1)
- Balloon Powered Car STAGDocument4 pagesBalloon Powered Car STAGveernantha100% (1)
- Important Concepts About Friction - : Schematic Diagram For FrictionDocument5 pagesImportant Concepts About Friction - : Schematic Diagram For Frictionbodkhe harshNo ratings yet
- Fig - 2.3.1 Pictorial Presentation of Moment of ForceDocument5 pagesFig - 2.3.1 Pictorial Presentation of Moment of ForcePriyanka BhateleNo ratings yet
- Chapter 1 - Principles of statics-2CE-4Document13 pagesChapter 1 - Principles of statics-2CE-4Bea BachillerNo ratings yet
- الميكانيك الهندسيDocument175 pagesالميكانيك الهندسيkraralbsyrawyNo ratings yet
- Statics Week 1 - 2019Document11 pagesStatics Week 1 - 2019Qazi Muhammed FayyazNo ratings yet
- Lec 9.stiffness 5Document73 pagesLec 9.stiffness 5Bheemesh GudelliNo ratings yet
- ME1222 - 3. Statics of Rigid Bodies Equivalent Systems of ForcesDocument37 pagesME1222 - 3. Statics of Rigid Bodies Equivalent Systems of Forces40-eng-0003No ratings yet
- Module 1Document62 pagesModule 1Nazim ur rehmanNo ratings yet
- EM - Lecture Notes - Module-1Document41 pagesEM - Lecture Notes - Module-1elinNo ratings yet
- Bodies or Fluids That Are at Rest or in Motions.: DynamicsDocument23 pagesBodies or Fluids That Are at Rest or in Motions.: DynamicsJames MichaelNo ratings yet
- Addis Ababa University Faculty of Technology Department of Civil EngineeringDocument63 pagesAddis Ababa University Faculty of Technology Department of Civil EngineeringZi BogaleNo ratings yet
- Unit1 NotesDocument56 pagesUnit1 NotesManikandanNo ratings yet
- Strength of MaterialsDocument128 pagesStrength of MaterialsNunavath KarthikNo ratings yet
- Concurrent Force Systems: Department of Mechanical EngineeringDocument53 pagesConcurrent Force Systems: Department of Mechanical EngineeringArmenion Mark AllenNo ratings yet
- Structural Dynamics UpdatedDocument24 pagesStructural Dynamics UpdatedatifNo ratings yet
- Statics of Rigid Bodies Chapters 1 - CompressDocument6 pagesStatics of Rigid Bodies Chapters 1 - CompressCharlie CharlieNo ratings yet
- Structural Analysis: Worsak Kanok-NukulchaiDocument9 pagesStructural Analysis: Worsak Kanok-NukulchaiAdam ZulkifliNo ratings yet
- Concept 1 of IntroductionDocument8 pagesConcept 1 of Introductionk.ghanemNo ratings yet
- Module 1: Introduction: Review of Basic Concepts in Mechanics Lecture 1: IntroductionDocument19 pagesModule 1: Introduction: Review of Basic Concepts in Mechanics Lecture 1: IntroductionSpurthi SrinivasNo ratings yet
- CH 1Document14 pagesCH 1Nawfal AlgheziNo ratings yet
- Mechanics of MaterialsDocument18 pagesMechanics of MaterialsIbtsaam ElahiNo ratings yet
- Introduction To MechanicsDocument26 pagesIntroduction To MechanicsBrian PaulNo ratings yet
- Concept of Engginering MechanicsDocument2 pagesConcept of Engginering MechanicsrosabelalebsNo ratings yet
- Strength of Materials I-1Document67 pagesStrength of Materials I-1Adebisi IbraheemNo ratings yet
- Structural AnalysisDocument220 pagesStructural AnalysisMohamedSajeerMNo ratings yet
- Unit-1&2 Engineering MechanicsDocument15 pagesUnit-1&2 Engineering MechanicsVaidyanathan RamakrishnanNo ratings yet
- Modelling and Researching of Forced Spatial Vibrations of Axial FansDocument5 pagesModelling and Researching of Forced Spatial Vibrations of Axial Fanstixy2013No ratings yet
- C 02 S & D (R & 3D S) : Hapter Tress Eflection Eview TressDocument80 pagesC 02 S & D (R & 3D S) : Hapter Tress Eflection Eview TressAhmd MahmoudNo ratings yet
- Conten T: Unit I:En Neerin Mechanics.......................................................................Document38 pagesConten T: Unit I:En Neerin Mechanics.......................................................................Mir Mustafa AliNo ratings yet
- The Laws of Motion StaticsDocument12 pagesThe Laws of Motion StaticsJoegeNo ratings yet
- Enggmechlesson1 2Document18 pagesEnggmechlesson1 2Raymund CarranzaNo ratings yet
- SM-1-UNIT-1 (1) INTRODUCTION-Laws of Forces (Structrual Mechanics)Document42 pagesSM-1-UNIT-1 (1) INTRODUCTION-Laws of Forces (Structrual Mechanics)pvrk_78No ratings yet
- Laws of Forces 1Document20 pagesLaws of Forces 1ngenoktNo ratings yet
- Em Ut1Document30 pagesEm Ut1david josephNo ratings yet
- To Understand The Basic Characteristics of Forces: Department of Mechanical EngineeringDocument54 pagesTo Understand The Basic Characteristics of Forces: Department of Mechanical EngineeringPrimoJr CarilloNo ratings yet
- Free Body Diagram and Quasi-Static, Two-Dimensional Load Analysis Free BodyDocument10 pagesFree Body Diagram and Quasi-Static, Two-Dimensional Load Analysis Free Bodyabdo alsyedNo ratings yet
- Engineering Mechanics Module 1Document38 pagesEngineering Mechanics Module 1jzeke senseiNo ratings yet
- Dynamic Analysis of Beams by Using The Finite Element MethodDocument6 pagesDynamic Analysis of Beams by Using The Finite Element MethodAkshay BuraNo ratings yet
- Summary of Topic Covered in ECE408Document89 pagesSummary of Topic Covered in ECE408Nishikata ManipolNo ratings yet
- Statically Determinant StructureDocument21 pagesStatically Determinant Structurealijahromi94No ratings yet
- EM - PPT - FinalpptxDocument28 pagesEM - PPT - FinalpptxShawn HunterNo ratings yet
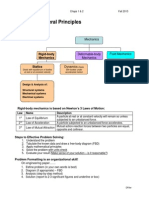
- Chap. 1 General Principles: What Is Mechanics? What Is Statics? MechanicsDocument4 pagesChap. 1 General Principles: What Is Mechanics? What Is Statics? Mechanicsrj2263No ratings yet
- Department of Mechanical Engineering Dynamics of MachineryDocument35 pagesDepartment of Mechanical Engineering Dynamics of Machinerypraveen ajithNo ratings yet
- Eng Mech Lesson 1-2 PDFDocument17 pagesEng Mech Lesson 1-2 PDFAlliza Kaye CasullaNo ratings yet
- Equilibrium, in Physics The Condition of A System When Neither Its State of Motion NorDocument7 pagesEquilibrium, in Physics The Condition of A System When Neither Its State of Motion Norbpal1970No ratings yet
- 01 CHAPTER 1 IntroductionDocument17 pages01 CHAPTER 1 IntroductionJerome XaviorNo ratings yet
- Structural Analysis R19 - UNIT-1 (Ref-2)Document56 pagesStructural Analysis R19 - UNIT-1 (Ref-2)SushNo ratings yet
- Structural Dynamics (CIV-702) : L T P Credits 2 1 0 3Document31 pagesStructural Dynamics (CIV-702) : L T P Credits 2 1 0 3kyleNo ratings yet
- Unit-I: Me18201 - Engineering MechanicsDocument20 pagesUnit-I: Me18201 - Engineering MechanicsMANOJ KUMAR MECNo ratings yet
- Solution Manual Mechanics J L MariamDocument75 pagesSolution Manual Mechanics J L MariamKhalid Yousaf86% (7)
- Program: B.Tech Subject Name: Basic Civil Engineering & Mechanics Subject Code: BT-204 Semester: 2ndDocument28 pagesProgram: B.Tech Subject Name: Basic Civil Engineering & Mechanics Subject Code: BT-204 Semester: 2nd[preetam sahuNo ratings yet
- CHP 1 Intro To Mechanisms & AnalysisDocument18 pagesCHP 1 Intro To Mechanisms & AnalysisabinmwangiNo ratings yet
- Lecture#1 Force VectorsDocument31 pagesLecture#1 Force VectorsASAD AliNo ratings yet
- Engineering Mechanics - Chapter 2Document45 pagesEngineering Mechanics - Chapter 2Kishan PurohitNo ratings yet
- Force Vectors: Engineering Mechanics-Statics-First Year-Civil EngineeringDocument8 pagesForce Vectors: Engineering Mechanics-Statics-First Year-Civil EngineeringAhmed NasratNo ratings yet
- RME Notes 3.1 Actuators Intro and MagnetismDocument7 pagesRME Notes 3.1 Actuators Intro and Magnetismbodkhe harshNo ratings yet
- James - Edmondson.electric Machines-1Document20 pagesJames - Edmondson.electric Machines-1bodkhe harshNo ratings yet
- Designand Researchof Axial Flux Permanent Magnet Motorfor Electric VehicleDocument7 pagesDesignand Researchof Axial Flux Permanent Magnet Motorfor Electric Vehiclebodkhe harshNo ratings yet
- Algorithm For Selection of Motor and VehicleDocument5 pagesAlgorithm For Selection of Motor and Vehiclebodkhe harshNo ratings yet
- Evolution and Recent AdvancementsDocument23 pagesEvolution and Recent Advancementsbodkhe harshNo ratings yet
- Purple Modern Professional YouTube Thumbnail (2000 × 8000 PX) (8000 × 2000 PX) (YouTube Thumbnail)Document1 pagePurple Modern Professional YouTube Thumbnail (2000 × 8000 PX) (8000 × 2000 PX) (YouTube Thumbnail)bodkhe harshNo ratings yet
- Artificial Muscles Based On EAPDocument14 pagesArtificial Muscles Based On EAPbodkhe harshNo ratings yet
- RME Notes 5.4,5.5,5.6-Power DevicesDocument25 pagesRME Notes 5.4,5.5,5.6-Power Devicesbodkhe harshNo ratings yet
- In The World of Rubber SpringsDocument8 pagesIn The World of Rubber Springsbodkhe harshNo ratings yet
- RME Notes 3.1 Actuators Intro and MagnetismDocument7 pagesRME Notes 3.1 Actuators Intro and Magnetismbodkhe harshNo ratings yet
- Theory: Mechanical & Systems Engineering Laboratory Assignment 2: Brinell Hardness TestDocument20 pagesTheory: Mechanical & Systems Engineering Laboratory Assignment 2: Brinell Hardness Testbodkhe harshNo ratings yet
- Aim Equipment Theory: Mechanical & Systems Engineering Laboratory Assignment 1: Tensile Test On Mild SteelDocument18 pagesAim Equipment Theory: Mechanical & Systems Engineering Laboratory Assignment 1: Tensile Test On Mild Steelbodkhe harshNo ratings yet
- Experiment 1 - 2D Drafting Using Autodesk SoftwareDocument14 pagesExperiment 1 - 2D Drafting Using Autodesk Softwarebodkhe harshNo ratings yet
- E.5 Engine Room Ventilation SystemDocument5 pagesE.5 Engine Room Ventilation Systemednsmn100% (1)
- Exercises On Stresses 2016Document2 pagesExercises On Stresses 2016Santos JustinNo ratings yet
- 11 2 NanopolymersDocument19 pages11 2 NanopolymersPrashant VermaNo ratings yet
- Aquatic Adaptations - Poonam SinghDocument46 pagesAquatic Adaptations - Poonam Singhaksahu01234No ratings yet
- Serge Florens and Antoine Georges - Quantum Impurity Solvers Using A Slave Rotor RepresentationDocument18 pagesSerge Florens and Antoine Georges - Quantum Impurity Solvers Using A Slave Rotor RepresentationYidel4313No ratings yet
- Pre Engineering Class Schedule 2023 24Document1 pagePre Engineering Class Schedule 2023 24abelendalew93No ratings yet
- Ejercicio 5Document5 pagesEjercicio 5Quispe AqhNo ratings yet
- Steel Plate Shear Wall Design Michel BruneauDocument25 pagesSteel Plate Shear Wall Design Michel BruneauAMAN FREDY100% (1)
- Manufacturing Processes: by Premchand Kumar Deoghar (Jharkhand)Document49 pagesManufacturing Processes: by Premchand Kumar Deoghar (Jharkhand)PremKumarNo ratings yet
- Experiment 6: Method of Mixture ObjectiveDocument3 pagesExperiment 6: Method of Mixture Objectiveshark eyeNo ratings yet
- Shock-Induced Collapse of A Gas Bubble in Shockwave LithotripsyDocument10 pagesShock-Induced Collapse of A Gas Bubble in Shockwave LithotripsyemadinscribdNo ratings yet
- Project Report On Self Compqcting ConcreteDocument86 pagesProject Report On Self Compqcting Concreteassssad20000No ratings yet
- CH 4 Review Delection and Stiffness1Document12 pagesCH 4 Review Delection and Stiffness1Anas TubailNo ratings yet
- Steel Structure ConnectionsDocument34 pagesSteel Structure ConnectionsSreedhar Patnaik.MNo ratings yet
- 181-186 For Web PDFDocument6 pages181-186 For Web PDFdiego.peinado8856100% (1)
- Final Published PaperDocument16 pagesFinal Published Paperrupesh kumarNo ratings yet
- tHREAD 2 MATERI OL 2 (PG Gerak)Document4 pagestHREAD 2 MATERI OL 2 (PG Gerak)festus wikannandaNo ratings yet
- Unit 6-Metals & Non-MetalsDocument8 pagesUnit 6-Metals & Non-MetalsRahul KumarNo ratings yet
- MPAPS A-37 - Stainless-Heat Resistant Steels and Finish RequirementsDocument18 pagesMPAPS A-37 - Stainless-Heat Resistant Steels and Finish RequirementsPANKAJ CHAUHANNo ratings yet
- LPT SopDocument7 pagesLPT SopQUALITYNo ratings yet
- Materials Science Manual Chapter 4Document21 pagesMaterials Science Manual Chapter 4aoguNo ratings yet
- Mehran University of Engineering and Technology Jamshoro.: Aqib Munir 20CE171Document5 pagesMehran University of Engineering and Technology Jamshoro.: Aqib Munir 20CE171Bais JumaniNo ratings yet
- Near Room Temperature Dielectric Transition in The Perovskite Formate Framework ( (CH) NH) (MG (HCOO) )Document10 pagesNear Room Temperature Dielectric Transition in The Perovskite Formate Framework ( (CH) NH) (MG (HCOO) )Cirilo SantosNo ratings yet
- Gaining Confidence With GD T - Part 2Document22 pagesGaining Confidence With GD T - Part 2Abraham ThomasNo ratings yet
- James Deane Resume 2022Document3 pagesJames Deane Resume 2022api-623113366No ratings yet
- Gen Sci ReviewerDocument2 pagesGen Sci ReviewerBerlin AlonzoNo ratings yet
- Index - 2019 - Power Plant Instrumentation and Control HandbookDocument20 pagesIndex - 2019 - Power Plant Instrumentation and Control HandbookOmar BouamoudNo ratings yet
- 987 9 PDFDocument205 pages987 9 PDFHerman JamalNo ratings yet