You might also like
- The Framework of Advanced Distribution Management SystemDocument5 pagesThe Framework of Advanced Distribution Management SystemBehrouz AzimianNo ratings yet
- Introduction to the simulation of power plants for EBSILON®Professional Version 15From EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15No ratings yet
- Maritime StandardsDocument102 pagesMaritime StandardsMgZin0% (1)
- MATH 103 - Thinking Mathematically I: Gesen @bilkent - Edu.trDocument2 pagesMATH 103 - Thinking Mathematically I: Gesen @bilkent - Edu.trVitto e Leo FerragniNo ratings yet
- Sensors: Power Factor Compensation Using Teaching Learning Based Optimization and Monitoring System by Cloud Data LoggerDocument23 pagesSensors: Power Factor Compensation Using Teaching Learning Based Optimization and Monitoring System by Cloud Data LoggerDungNo ratings yet
- Achieving Higher Power Plant Performance: GenerationDocument4 pagesAchieving Higher Power Plant Performance: GenerationmanahujaNo ratings yet
- Advance Process ControlDocument11 pagesAdvance Process Control김형진No ratings yet
- Model Reference Adaptive Control of Jacketed Stirred Tank HeaterDocument6 pagesModel Reference Adaptive Control of Jacketed Stirred Tank HeaterChung ChuanNo ratings yet
- Simulators For Risk AssessmentDocument20 pagesSimulators For Risk Assessmentajrojas1359100% (1)
- Vlsi Handbook ChapDocument34 pagesVlsi Handbook ChapJnaneswar BhoomannaNo ratings yet
- Controller Design ThesisDocument4 pagesController Design Thesisaprilgriffinbeaumont100% (2)
- MCT Lab ManualDocument75 pagesMCT Lab ManualManeeshNo ratings yet
- ATEE 2004 Ilas 4.1Document6 pagesATEE 2004 Ilas 4.1electrotehnicaNo ratings yet
- Performance PDFDocument109 pagesPerformance PDFRafa SoriaNo ratings yet
- An Efficient Wireless Noc With Congestion-Aware Routing For Multicore ChipsDocument5 pagesAn Efficient Wireless Noc With Congestion-Aware Routing For Multicore ChipsHimanshu PatelNo ratings yet
- The Design and Use of Simplepower: A Cycle-Accurate Energy Estimation ToolDocument6 pagesThe Design and Use of Simplepower: A Cycle-Accurate Energy Estimation Tooltilottama_deoreNo ratings yet
- Scada Project 1326860164Document86 pagesScada Project 1326860164ddh3107No ratings yet
- Three Phase PWM Rectifier ThesisDocument7 pagesThree Phase PWM Rectifier Thesisalanacartwrightnorman100% (2)
- Design of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueDocument15 pagesDesign of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueroyclhorNo ratings yet
- Optimising Safety Relief and Flare SystemsDocument8 pagesOptimising Safety Relief and Flare SystemsJoseph McMullenNo ratings yet
- Power Plant Performance Monitoring Using Statistical Methodology ApproachDocument14 pagesPower Plant Performance Monitoring Using Statistical Methodology ApproachChethan KumarNo ratings yet
- Mathematical Modelling TechniqueDocument6 pagesMathematical Modelling Techniquenilesh_092No ratings yet
- cb42 PDFDocument4 pagescb42 PDFmahendra ANo ratings yet
- Simulate Power Plant Superheater in SimulinkDocument4 pagesSimulate Power Plant Superheater in SimulinkHendra Sutan Intan MarajoNo ratings yet
- Willans Line ArticleDocument8 pagesWillans Line Articlealiscribd46100% (1)
- Report SemiFinal PDFDocument8 pagesReport SemiFinal PDFBiyadglgne Eskezia AyalewNo ratings yet
- Optimal Power Flow Sensitivity CalculationDocument8 pagesOptimal Power Flow Sensitivity CalculationEléctrico IngenieríaNo ratings yet
- Gridmpc: A Service-Oriented Grid Architecture For Coupling Simulation and Control of Industrial SystemsDocument8 pagesGridmpc: A Service-Oriented Grid Architecture For Coupling Simulation and Control of Industrial SystemsIrfan Akbar BarbarossaNo ratings yet
- Fractional Order Pid Controller ThesisDocument7 pagesFractional Order Pid Controller Thesissoniasancheznewyork100% (2)
- Fast-Predictive Optimal Control of NPC Multilevel ConvertersDocument9 pagesFast-Predictive Optimal Control of NPC Multilevel Converterskanda71No ratings yet
- A New Automotive Air Conditioning System Simulation Tool Developed in MATLAB/SimulinkDocument15 pagesA New Automotive Air Conditioning System Simulation Tool Developed in MATLAB/SimulinkPrashant IngaleNo ratings yet
- Speed Control of A Real Time D.C. Shunt Motor Using SA Based Tuning of A PID ControllerDocument7 pagesSpeed Control of A Real Time D.C. Shunt Motor Using SA Based Tuning of A PID Controllerprince1991kundraNo ratings yet
- Numerical Simulation in Automotive Design: G. Lonsdale C&C Research Laboratories, NEC Europe LTD., St. Augustin, GermanyDocument7 pagesNumerical Simulation in Automotive Design: G. Lonsdale C&C Research Laboratories, NEC Europe LTD., St. Augustin, Germanybadboys123No ratings yet
- Model Reference Adaptive Control (MRAC) Theory and ApplicationDocument22 pagesModel Reference Adaptive Control (MRAC) Theory and Applicationasusd112550% (4)
- Model-Based Approach to Engine CalibrationDocument8 pagesModel-Based Approach to Engine CalibrationbiopoweredNo ratings yet
- Self-Tuning Analog PID Controller Outperforms Hand-Tuned DesignDocument8 pagesSelf-Tuning Analog PID Controller Outperforms Hand-Tuned DesignJun LeeNo ratings yet
- Run-Time Scaling of Microarchitecture Resources in A Processor For Energy SavingsDocument4 pagesRun-Time Scaling of Microarchitecture Resources in A Processor For Energy Savingsinr0000zhaNo ratings yet
- Investigation of Model Predictive Control For Fifth Generation District Heating and Cooling (5GDHC) SubstationsDocument11 pagesInvestigation of Model Predictive Control For Fifth Generation District Heating and Cooling (5GDHC) SubstationsSimone BuffaNo ratings yet
- Creating A Microgrid Energy Management System Using NI LabVIEW and DAQDocument7 pagesCreating A Microgrid Energy Management System Using NI LabVIEW and DAQtunghtdNo ratings yet
- MODEL REPORT HardwareDocument61 pagesMODEL REPORT HardwareSTAR E WORLDNo ratings yet
- 23 1400 Kahleongkoo 01Document12 pages23 1400 Kahleongkoo 01jhjkljghjhlNo ratings yet
- Design of Analog Integrated Circuits Using Simulated Annealing/Quenching With Crossovers and Particle Swarm OptimizationDocument26 pagesDesign of Analog Integrated Circuits Using Simulated Annealing/Quenching With Crossovers and Particle Swarm OptimizationJ Angel Wolf MaketasNo ratings yet
- Tool of The Complete Optimal Control For Variable Speed Electrical DrivesDocument36 pagesTool of The Complete Optimal Control For Variable Speed Electrical DrivesrijilpoothadiNo ratings yet
- CIRED2009 0518 PaperDocument4 pagesCIRED2009 0518 PapersrivaishnaviNo ratings yet
- Design of Embedded Controller Using Hybrid Systems For Integrated Building SystemsDocument13 pagesDesign of Embedded Controller Using Hybrid Systems For Integrated Building SystemsCarlos David Paniagua GomezNo ratings yet
- Comparison Study of Different Structures of PID ControllersDocument9 pagesComparison Study of Different Structures of PID Controllers賴明宏No ratings yet
- The Simulation and Evaluation of Dynamic Voltage Scaling AlgorithmsDocument6 pagesThe Simulation and Evaluation of Dynamic Voltage Scaling AlgorithmsArmin AhmadzadehNo ratings yet
- Projectsoffered 2006Document49 pagesProjectsoffered 2006Tarak BenslimaneNo ratings yet
- USF MSEE Portfolio on Control Theory and VHDL SimulationsDocument10 pagesUSF MSEE Portfolio on Control Theory and VHDL SimulationsEdyan Andres Umbria ReveteNo ratings yet
- Modeling and Simulation of A Digital Control Design Approach For Power Supply SystemsDocument4 pagesModeling and Simulation of A Digital Control Design Approach For Power Supply SystemsVic PagolaNo ratings yet
- Ma Rgy Ne E Ms MS) S Te Sy (EDocument44 pagesMa Rgy Ne E Ms MS) S Te Sy (EMohammedSaadaniHassaniNo ratings yet
- Computationally Efficient Self Tuning Controller For DC DC Switch Mode Power Converters Based On Partial Update Kalman Filter SingleDocument24 pagesComputationally Efficient Self Tuning Controller For DC DC Switch Mode Power Converters Based On Partial Update Kalman Filter SingleMairaj-ud-din MuftiNo ratings yet
- The Design of A Low Power Asynchronous Multiplier: Yijun Liu, Steve FurberDocument6 pagesThe Design of A Low Power Asynchronous Multiplier: Yijun Liu, Steve FurberMishi AggNo ratings yet
- Energies: Research On Improved Auto-Tuning of A PID Controller Based On Phase Angle MarginDocument16 pagesEnergies: Research On Improved Auto-Tuning of A PID Controller Based On Phase Angle MarginLautaro Benjamín IbañezNo ratings yet
- Effective Modeling and Simulation of Internal Combustion Engine Control SystemsDocument5 pagesEffective Modeling and Simulation of Internal Combustion Engine Control SystemsShailesh JhaNo ratings yet
- Current Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlDocument10 pagesCurrent Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlAnushya RavikumarNo ratings yet
- Design of Roba Multiplier For High-Speed Yet Energy-Efficient Digital Signal Processing Using Verilog HDLDocument16 pagesDesign of Roba Multiplier For High-Speed Yet Energy-Efficient Digital Signal Processing Using Verilog HDLNishitha NishiNo ratings yet
- PNN-Based Excitation Control of Synchronous MachinesDocument11 pagesPNN-Based Excitation Control of Synchronous MachinesNihar RoyNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Assignment#2Document41 pagesAssignment#2Our Beatiful Waziristan OfficialNo ratings yet
- Comsats University Islamabad Abbotabad CampusDocument5 pagesComsats University Islamabad Abbotabad CampusOur Beatiful Waziristan OfficialNo ratings yet
- Task 1Document2 pagesTask 1Our Beatiful Waziristan OfficialNo ratings yet
- Assignment #3aDocument18 pagesAssignment #3aOur Beatiful Waziristan OfficialNo ratings yet
- Assignment #3Document23 pagesAssignment #3Our Beatiful Waziristan OfficialNo ratings yet
- Basically I Want A Python Script That Generates Queries Like This OneDocument1 pageBasically I Want A Python Script That Generates Queries Like This OneOur Beatiful Waziristan OfficialNo ratings yet
- Viterbi Decoder Performance Over AWGN Channel For BPSK Modulated SymbolsDocument1 pageViterbi Decoder Performance Over AWGN Channel For BPSK Modulated SymbolsOur Beatiful Waziristan OfficialNo ratings yet
- 2Document4 pages2Our Beatiful Waziristan OfficialNo ratings yet
- Attock Refinery risk assessmentDocument11 pagesAttock Refinery risk assessmentOur Beatiful Waziristan OfficialNo ratings yet
- Current Vs VoltageDocument1 pageCurrent Vs VoltageOur Beatiful Waziristan OfficialNo ratings yet
- COMSATS Institute of Information Technology Abbottabad Department of Management SciencesDocument1 pageCOMSATS Institute of Information Technology Abbottabad Department of Management SciencesOur Beatiful Waziristan OfficialNo ratings yet
- Advanced Costing and Auditing ProblemsDocument5 pagesAdvanced Costing and Auditing ProblemsOur Beatiful Waziristan OfficialNo ratings yet
- B. Tech-in-Computer-Science-and-Engineering-Data-Science-Thir-Year-2023-24Document73 pagesB. Tech-in-Computer-Science-and-Engineering-Data-Science-Thir-Year-2023-24Sushant5inghrajputNo ratings yet
- Unit 25 Sound RecordingDocument21 pagesUnit 25 Sound Recordingapi-480389176No ratings yet
- Devanshi Shipping Agency PVT LTD: Infinity International Infinity InternationalDocument5 pagesDevanshi Shipping Agency PVT LTD: Infinity International Infinity InternationalTARUN SUTHARNo ratings yet
- CCFMDocument8 pagesCCFMnagarjunaNo ratings yet
- WOLF A1 Operator ManualDocument2 pagesWOLF A1 Operator Manuallivintrife2gNo ratings yet
- Fire Risk Assessment FormDocument20 pagesFire Risk Assessment FormAhmed Ibrahim100% (1)
- Hybrid Pile Foundations IPWE SeminarDocument22 pagesHybrid Pile Foundations IPWE Seminarrohit100% (1)
- Test Procedure Offer 019-14V 3015Document5 pagesTest Procedure Offer 019-14V 3015sohaibNo ratings yet
- Installation of ESRS Virtual Edition (ESRSVE) On VMwareDocument58 pagesInstallation of ESRS Virtual Edition (ESRSVE) On VMwaremummy206No ratings yet
- Matlab Code For Digital Modulation TechniquesDocument25 pagesMatlab Code For Digital Modulation TechniquesRam Murthy100% (1)
- Harmonic Patterns: Guides To Profitable TradingDocument7 pagesHarmonic Patterns: Guides To Profitable TradingalokNo ratings yet
- UN Women Branding GuidelinesDocument37 pagesUN Women Branding GuidelinesDenis Shepherd KimathiNo ratings yet
- Unit1 DBMSDocument64 pagesUnit1 DBMSRaj SuraseNo ratings yet
- Bess-Sm-3q90041-Qams-003 Method of Statement - Cable Termination PDFDocument5 pagesBess-Sm-3q90041-Qams-003 Method of Statement - Cable Termination PDFChristian BulaongNo ratings yet
- Jobs-In-Webduniaweb-Portal/ Telugu Translation Jobs in Webdunia (Web Portal)Document3 pagesJobs-In-Webduniaweb-Portal/ Telugu Translation Jobs in Webdunia (Web Portal)Rangothri Sreenivasa SubramanyamNo ratings yet
- Literacy Narrative Essay 1Document3 pagesLiteracy Narrative Essay 1api-644119616No ratings yet
- Unity University: Faculty of Engineering and Technology Department of Computer ScienceDocument2 pagesUnity University: Faculty of Engineering and Technology Department of Computer ScienceBura ArsenalNo ratings yet
- Aire Acondicionado Split Mural X Frig TK 10992786 TechsheetsupDocument1 pageAire Acondicionado Split Mural X Frig TK 10992786 TechsheetsupJOSE ANGEL VILLALOBOS JIMENEZNo ratings yet
- Standard Operating ProcedureDocument39 pagesStandard Operating ProcedureAndrew Charles0% (1)
- User Guide For Speedlink: Hearing Instrument Programming InterfaceDocument26 pagesUser Guide For Speedlink: Hearing Instrument Programming InterfaceMarcio Lobo SelvagemNo ratings yet
- Qlassic Score Exercise FormDocument1 pageQlassic Score Exercise FormMarkjue14 Azizul100% (1)
- Microsoft Excel Exam Assessment Questions: Important InstructionsDocument3 pagesMicrosoft Excel Exam Assessment Questions: Important InstructionsKaartiikBenNo ratings yet
- E176 PDFDocument20 pagesE176 PDFAhmad Zubair RasulyNo ratings yet
- Service Bulletin: Fuel Injection PumpDocument15 pagesService Bulletin: Fuel Injection PumpKrunoslavNo ratings yet
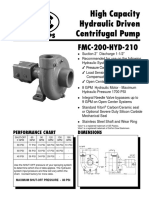
- FMC 200 Hyd 210Document2 pagesFMC 200 Hyd 210Ruben SaccoNo ratings yet
- Samsung 2233sn Service Manual: Read/DownloadDocument2 pagesSamsung 2233sn Service Manual: Read/DownloadIordan Adrian0% (1)
- HPLC Analysis of Irbesartan and Conjugated MetaboliteDocument8 pagesHPLC Analysis of Irbesartan and Conjugated MetaboliteBrendapaez3No ratings yet
- "Experimental Investigation On The Use of Coconut Shell As Partial Replacement of Coarse Aggregate in Concrete'' Nikhil M. DofeDocument18 pages"Experimental Investigation On The Use of Coconut Shell As Partial Replacement of Coarse Aggregate in Concrete'' Nikhil M. DofeKomal mankarNo ratings yet