You might also like
- Polar Coordinate SystemsDocument8 pagesPolar Coordinate SystemsalfiaNo ratings yet
- Laplace Transforms for ODEsDocument5 pagesLaplace Transforms for ODEsTing Wee KietNo ratings yet
- Mechines of Mechinism Chapter 2Document13 pagesMechines of Mechinism Chapter 2abdulmajeedNo ratings yet
- Assignment 2 SolutionsDocument13 pagesAssignment 2 SolutionsboyarskyNo ratings yet
- Linear Equations and Matrices SolutionsDocument45 pagesLinear Equations and Matrices SolutionsM ihsan ullahNo ratings yet
- Math2065: Intro To Pdes Tutorial Solutions (Week 3)Document3 pagesMath2065: Intro To Pdes Tutorial Solutions (Week 3)TOM DAVISNo ratings yet
- IB HL Math Homework #1 Solutions ExplainedDocument4 pagesIB HL Math Homework #1 Solutions ExplainedAlnaiza SariulNo ratings yet
- Metode RombergDocument37 pagesMetode RombergBhidaraNo ratings yet
- Assignment 2Document6 pagesAssignment 2Kalpit AgarwalNo ratings yet
- 2 Cosh 5 8 3 5: Willian Arroyo CI: 26.461.435Document7 pages2 Cosh 5 8 3 5: Willian Arroyo CI: 26.461.435winfer90No ratings yet
- 03 - The Laplace TransformDocument54 pages03 - The Laplace TransformHandi RizkinugrahaNo ratings yet
- Regional Mathematical Olympiad 2010Document8 pagesRegional Mathematical Olympiad 2010latinovalentNo ratings yet
- Unit-VII Laplace Transforms: Properties of Laplace Transforms: L. Linearity Property: IfDocument21 pagesUnit-VII Laplace Transforms: Properties of Laplace Transforms: L. Linearity Property: IfRanjan NayakNo ratings yet
- Section 3-8: Area With Polar Coordinates: Example 1Document8 pagesSection 3-8: Area With Polar Coordinates: Example 1kahob821No ratings yet
- Representing Functions Graphically and NumericallyDocument1,778 pagesRepresenting Functions Graphically and NumericallyAnderson AraújoNo ratings yet
- Modular Arithmetic and CongruenceDocument29 pagesModular Arithmetic and CongruenceAkshay KumarNo ratings yet
- CongnumberDocument17 pagesCongnumbersab108No ratings yet
- Laplace Transform Examples and SolutionsDocument8 pagesLaplace Transform Examples and SolutionsSeanne CruzNo ratings yet
- EE-202 Exam I February 16, 2009: NameDocument11 pagesEE-202 Exam I February 16, 2009: NameBoilerhelproomNo ratings yet
- Analytic Geometry in Calculus: Polar Coordinate ExercisesDocument45 pagesAnalytic Geometry in Calculus: Polar Coordinate ExercisescharlesbrachNo ratings yet
- A Numerical Scheme For Unsteady Flow of A Viscous Fluid Between Elliptic PlatesDocument5 pagesA Numerical Scheme For Unsteady Flow of A Viscous Fluid Between Elliptic PlatesHamid MojiryNo ratings yet
- Kinematics of Spatial Linkages Chapter 4Document19 pagesKinematics of Spatial Linkages Chapter 4vmuniNo ratings yet
- Complex AnalysisDocument5 pagesComplex AnalysisSteven WeiNo ratings yet
- Geometric Folding Algorithms Problem Set 3 SolutionsDocument4 pagesGeometric Folding Algorithms Problem Set 3 SolutionsOrlando AlvarezNo ratings yet
- "Trigon" Triangle +"metry" Measurement Trigonometry: Review of Trigonometry For CalculusDocument10 pages"Trigon" Triangle +"metry" Measurement Trigonometry: Review of Trigonometry For CalculusAbdulaziz MohammedNo ratings yet
- SVSU 2005 Math Olympics ProblemsDocument8 pagesSVSU 2005 Math Olympics ProblemsRaghav guptaNo ratings yet
- Trigonometric Functions - EquationsDocument93 pagesTrigonometric Functions - EquationsBen RuliNo ratings yet
- S-Space.: Differential Equations 1.3 Inverse Laplace Transform - Part 1Document5 pagesS-Space.: Differential Equations 1.3 Inverse Laplace Transform - Part 1Nur SyazwaniNo ratings yet
- ME 352 - Machine Design I Name of Student: - Fall Semester 2019 Lab Section NumberDocument7 pagesME 352 - Machine Design I Name of Student: - Fall Semester 2019 Lab Section NumberirqoviNo ratings yet
- Answer 59908Document2 pagesAnswer 59908Warren D BejasaNo ratings yet
- Lecture29 PDFDocument6 pagesLecture29 PDFSurangaGNo ratings yet
- Exercícios Resolvidos Capítulo I - James StewartDocument14 pagesExercícios Resolvidos Capítulo I - James StewartBianca Cristina MoggioNo ratings yet
- 10th STD - Mathematical Formulae - 2Document4 pages10th STD - Mathematical Formulae - 2ambresh.09No ratings yet
- TRIGONOMETRY - JEE Main - July 2022Document3 pagesTRIGONOMETRY - JEE Main - July 2022Shalini Sathish KumarNo ratings yet
- Classroom Contact Programme TestDocument22 pagesClassroom Contact Programme TestCharu SharmaNo ratings yet
- DAA - Questions With AnswerDocument9 pagesDAA - Questions With Answerprianka rrNo ratings yet
- General Aptitude by Career Endeavour (Z-Lib - Org) ExportDocument8 pagesGeneral Aptitude by Career Endeavour (Z-Lib - Org) ExportBhupi.SamNo ratings yet
- Basic Maths for Physics 100QDocument13 pagesBasic Maths for Physics 100QDeath ClickerNo ratings yet
- AMP1 Q (Theo) 2021 SeriesD (Emo) en (1sidedBUNDLE) Answers enDocument4 pagesAMP1 Q (Theo) 2021 SeriesD (Emo) en (1sidedBUNDLE) Answers enDaufNo ratings yet
- Tranformada LaplaceDocument52 pagesTranformada LaplaceLuis JimenezNo ratings yet
- Solving Quartic Equations with a Universal MethodDocument10 pagesSolving Quartic Equations with a Universal MethodlalasoisNo ratings yet
- MAT1275 Final ReviewDocument9 pagesMAT1275 Final Reviewyonatanfiseha2No ratings yet
- Calc CH 2 Solutions CPMDocument21 pagesCalc CH 2 Solutions CPMAngel Villa50% (4)
- FluxGausssolsDocument9 pagesFluxGausssolsaakashbalaprajapathiofficialNo ratings yet
- Notes On Complex NumbersDocument8 pagesNotes On Complex NumbersPratip JanaNo ratings yet
- Winter Ap Quiz One AnswersDocument3 pagesWinter Ap Quiz One AnswersteachopensourceNo ratings yet
- Grade 10 Canadian Math Kangaroo Contest Sample PaperDocument10 pagesGrade 10 Canadian Math Kangaroo Contest Sample PaperEduGain100% (1)
- Gu Ia de Problemas de La Secci On 2.5 Del Libro Mathematical Methods For Physicists, Sixth Edition, de George ArfkenDocument8 pagesGu Ia de Problemas de La Secci On 2.5 Del Libro Mathematical Methods For Physicists, Sixth Edition, de George ArfkenSergio AguilarNo ratings yet
- Paper - 1: Mathematics, Physics & Chemistry: This Booklet Contains 24 Printed PagesDocument24 pagesPaper - 1: Mathematics, Physics & Chemistry: This Booklet Contains 24 Printed Pagesashish kherNo ratings yet
- Grade XI Trigonometric Functions Chapter TestDocument3 pagesGrade XI Trigonometric Functions Chapter TestJane EvangelineNo ratings yet
- Latihtan Integral Numerik 2023Document5 pagesLatihtan Integral Numerik 2023ABC artNo ratings yet
- Numerical IntegrationDocument9 pagesNumerical Integrationyhzsgy26m6No ratings yet
- CSCE 3110 Data Structures and Algorithms Assignment 2Document4 pagesCSCE 3110 Data Structures and Algorithms Assignment 2Ayesha EhsanNo ratings yet
- Trigonometric Formula Sheet: Definition of The Trig FunctionsDocument10 pagesTrigonometric Formula Sheet: Definition of The Trig Functionsmonelmetal100% (1)
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Test Bank for Precalculus: Functions & GraphsFrom EverandTest Bank for Precalculus: Functions & GraphsRating: 5 out of 5 stars5/5 (1)
- Cost Model for Data Management Center (DMCDocument63 pagesCost Model for Data Management Center (DMCkrds chidNo ratings yet
- Ammonia Removal Efficiency RequirementDocument14 pagesAmmonia Removal Efficiency RequirementProcess Engineer CFDNo ratings yet
- Question 1Document2 pagesQuestion 1Process Engineer CFDNo ratings yet
- AlgorithmDocument9 pagesAlgorithmProcess Engineer CFDNo ratings yet
- Work 3Document2 pagesWork 3Process Engineer CFDNo ratings yet
- Simple An Itterative Procedure For Solving Linear EquationsDocument4 pagesSimple An Itterative Procedure For Solving Linear EquationsProcess Engineer CFDNo ratings yet
- Revised Special Pay Scale 2017 2010 Adhoc MergeDocument5 pagesRevised Special Pay Scale 2017 2010 Adhoc MergeProcess Engineer CFDNo ratings yet
- BRUCE CalculatorDocument2 pagesBRUCE CalculatorProcess Engineer CFDNo ratings yet
- Odd and Even Numbers Term 1Document2 pagesOdd and Even Numbers Term 1api-277245562No ratings yet
- Stat 1x1 Final Exam Review Questions (Units 9, 10, 11)Document8 pagesStat 1x1 Final Exam Review Questions (Units 9, 10, 11)Ho Uyen Thu NguyenNo ratings yet
- Ws Appendix DynaDocument60 pagesWs Appendix DynaSerkan AltıntaşNo ratings yet
- 24 - Practical Poker Math (Pat Dittmar)Document252 pages24 - Practical Poker Math (Pat Dittmar)Fabian CerdaNo ratings yet
- Ecuaciones en Color en BeamerDocument21 pagesEcuaciones en Color en BeamerDARIO CASTRO CASTRONo ratings yet
- Cracku RRB NTPC Syllogism Questions PDFDocument32 pagesCracku RRB NTPC Syllogism Questions PDFshishirNo ratings yet
- Water 08 00587 v2 PDFDocument9 pagesWater 08 00587 v2 PDFvinitNo ratings yet
- GE3151 - Python SyllabusDocument2 pagesGE3151 - Python Syllabussaro2330No ratings yet
- A-1. Limits Intuitive Intro - AnswesDocument4 pagesA-1. Limits Intuitive Intro - AnswesBowman DicksonNo ratings yet
- Financial Math Exam—April 2023Document8 pagesFinancial Math Exam—April 2023Orlan RodriguezNo ratings yet
- Kuliah5.1 - (Integrasi Numerik)Document120 pagesKuliah5.1 - (Integrasi Numerik)adrian bargasNo ratings yet
- Oscillations MCQDocument8 pagesOscillations MCQShalini KulshresthaNo ratings yet
- Lte-Rf-Planning-Optimization Drive Testing Et AlDocument60 pagesLte-Rf-Planning-Optimization Drive Testing Et AlEfosa AigbeNo ratings yet
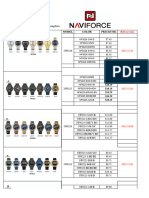
- NAVIFORCE Watch Catalogue in USD - Updated in 20240104Document47 pagesNAVIFORCE Watch Catalogue in USD - Updated in 20240104Perez PerezNo ratings yet
- Dynamic Analysis of Turbo-Generator MachineDocument6 pagesDynamic Analysis of Turbo-Generator MachinetsunamiNo ratings yet
- CivilEngineering Syllabus - R14 PDFDocument137 pagesCivilEngineering Syllabus - R14 PDFBhanu Prakash PagoluNo ratings yet
- Average Database ValuesDocument395 pagesAverage Database Valuessam_gandaNo ratings yet
- You Can Create An SFAS Matrix by Following These StepsDocument4 pagesYou Can Create An SFAS Matrix by Following These StepspassantNo ratings yet
- Allen: Pre-Nurture CourseDocument3 pagesAllen: Pre-Nurture CourseAshrithNo ratings yet
- Groovy Lang SpecificationDocument643 pagesGroovy Lang SpecificationguidgenNo ratings yet
- Plotting Continuous Time Signals in MATLABDocument27 pagesPlotting Continuous Time Signals in MATLABZiYAD AhmadNo ratings yet
- Role of computers in streamlining product developmentDocument10 pagesRole of computers in streamlining product developmentssdeepthiNo ratings yet
- 3 Stress AnalysisDocument22 pages3 Stress Analysisrd_mechNo ratings yet
- Report ErythromycinDocument26 pagesReport ErythromycinKraken UrNo ratings yet
- Module 1c Number Systems and PresentationDocument53 pagesModule 1c Number Systems and PresentationMairos Kunze BongaNo ratings yet
- Btech Mech 7 Sem Mechanical Vibration Pme7j001 2020Document3 pagesBtech Mech 7 Sem Mechanical Vibration Pme7j001 2020Soumya SanjibNo ratings yet
- Graphic AidsDocument56 pagesGraphic AidsJoyce GonzagaNo ratings yet
- Dac 314 Group 3 (C-V-P Analysis)Document39 pagesDac 314 Group 3 (C-V-P Analysis)Eustus KipkemboiNo ratings yet
- Level of Difficulty of UPCATDocument48 pagesLevel of Difficulty of UPCATVincent VillegasNo ratings yet
- Estadio de NollaDocument13 pagesEstadio de NollaCATALINA VASQUEZ LOPEZ100% (1)