You might also like
- ASNT NDT Level 3 Examination Model Question BankDocument2 pagesASNT NDT Level 3 Examination Model Question BankShrikant Utekar100% (3)
- The Wealthy Barber - Everyone's Commonsense Guide To Becoming Financially IndependentDocument219 pagesThe Wealthy Barber - Everyone's Commonsense Guide To Becoming Financially IndependentcutefrenzyNo ratings yet
- API 570 Quiz - Recertification 2016 SeptDocument8 pagesAPI 570 Quiz - Recertification 2016 Septadma1No ratings yet
- A Review of The Application of Weld Symbols On Drawings - Part 2 - Job Knowledge 65Document5 pagesA Review of The Application of Weld Symbols On Drawings - Part 2 - Job Knowledge 65tuanNo ratings yet
- Advanced Ultrasonic Flaw Sizing of Stress Corrosion Cracking Advanced Ultrasonic PDFDocument4 pagesAdvanced Ultrasonic Flaw Sizing of Stress Corrosion Cracking Advanced Ultrasonic PDFphutd09No ratings yet
- Method Statement For Prefabrication and Erection PipingDocument10 pagesMethod Statement For Prefabrication and Erection Pipingmohd as shahiddin jafriNo ratings yet
- Petrobras FPSO Carioca MV30: Inspection and Test Plan (Pump & Package) For PBA-1135 A/BDocument11 pagesPetrobras FPSO Carioca MV30: Inspection and Test Plan (Pump & Package) For PBA-1135 A/BAliasgar100% (2)
- 051200Document11 pages051200sivaNo ratings yet
- Kaczmarek-Joint Geometry Indications in Conventional Ultrasonic Tests and Phased Array TestsDocument10 pagesKaczmarek-Joint Geometry Indications in Conventional Ultrasonic Tests and Phased Array TestsRamakrishnan AmbiSubbiahNo ratings yet
- Steel Connections: Connection Name: MF-I24-02 Connection ID: 1 Design Code: AISC 360-2005 LRFDDocument12 pagesSteel Connections: Connection Name: MF-I24-02 Connection ID: 1 Design Code: AISC 360-2005 LRFDmalikasalNo ratings yet
- AISC Properties MM GPP 2017Document87 pagesAISC Properties MM GPP 2017Pablo García PeñaNo ratings yet
- Metrology Lab w2014Document15 pagesMetrology Lab w2014ObaidNo ratings yet
- Welder Qualification Test Log: Engineering Standards Manual OST220-03-01-ESM Chapter 13, WeldingDocument1 pageWelder Qualification Test Log: Engineering Standards Manual OST220-03-01-ESM Chapter 13, WeldingReza100% (1)
- Geometrical TolerancingDocument12 pagesGeometrical TolerancingItalo Venegas100% (1)
- AWS Weld Symbol BasicsDocument3 pagesAWS Weld Symbol Basicschairul anwarNo ratings yet
- Basic Review CardDocument6 pagesBasic Review CardSheena LeavittNo ratings yet
- Structural Calculation For Directly Welded Flange FR Moment Connection (Beam-To-Column Flange)Document10 pagesStructural Calculation For Directly Welded Flange FR Moment Connection (Beam-To-Column Flange)danieldumapitNo ratings yet
- Introduction To Non-Destructive TestingDocument34 pagesIntroduction To Non-Destructive Testingegy pure100% (1)
- Result Summary - Overall Brace To Gusset Gusset To Column Gusset To Base PlateDocument42 pagesResult Summary - Overall Brace To Gusset Gusset To Column Gusset To Base PlateMichenerparkNo ratings yet
- New Microsoft Office Word DocumentDocument9 pagesNew Microsoft Office Word DocumentKhalid PerwezNo ratings yet
- Arc Welding ReadingDocument16 pagesArc Welding ReadingJessica S. MellNo ratings yet
- Ultrasonic Testing Handbook 221Document1 pageUltrasonic Testing Handbook 221joNo ratings yet
- List of Qualified Welder Summary BLCPDocument2 pagesList of Qualified Welder Summary BLCPpstechnical_43312697No ratings yet
- ISO 3834purchasedocumentDocument8 pagesISO 3834purchasedocumenthector-salomonNo ratings yet
- Applicable ASTM Specifications For Structural Fasteners: Table 3.8 Anchor RodsDocument1 pageApplicable ASTM Specifications For Structural Fasteners: Table 3.8 Anchor Rodsivan bolañosNo ratings yet
- Chevron ConnectionDocument35 pagesChevron ConnectionAbdelrahman YoussefNo ratings yet
- Question Excerpt From CSWIP 3Document4 pagesQuestion Excerpt From CSWIP 3Ekor JohnNo ratings yet
- Ut Job Knowledge - TwiDocument10 pagesUt Job Knowledge - TwiBhanu Pratap ChoudhuryNo ratings yet
- Are You Really Ready To Take A CWI SeminarDocument3 pagesAre You Really Ready To Take A CWI SeminarJerryNo ratings yet
- Weld SummaryDocument85 pagesWeld SummarywalitedisonNo ratings yet
- AWS Catalog 2017 Winter SpringDocument52 pagesAWS Catalog 2017 Winter SpringPilar Medrano MenaNo ratings yet
- Engineering Drawing Notes BDocument50 pagesEngineering Drawing Notes BsrchougulaNo ratings yet
- Digital Ultrasonic Flaw Detectors For Curved SurfaceDocument11 pagesDigital Ultrasonic Flaw Detectors For Curved Surfaceiprao0% (1)
- Ultrasonic Examination Part 2Document4 pagesUltrasonic Examination Part 2JlkKumarNo ratings yet
- Result Summary: Pass PassDocument11 pagesResult Summary: Pass PassAmedeo SbacchiNo ratings yet
- Engg - Drawing 1st Year LMDocument167 pagesEngg - Drawing 1st Year LMPRIYABRATA JENANo ratings yet
- How To Specify Fasteners: 3/4 - 10 X 5 Hex Cap Screw Grade 5 Zinc 3/4 - 16 X 5 Hex Cap Screw Grade 5 ZincDocument15 pagesHow To Specify Fasteners: 3/4 - 10 X 5 Hex Cap Screw Grade 5 Zinc 3/4 - 16 X 5 Hex Cap Screw Grade 5 ZincAndré BuysNo ratings yet
- How To Read Welding GaugesDocument8 pagesHow To Read Welding GaugeshemnNo ratings yet
- SpliceDocument17 pagesSpliceSh MNNo ratings yet
- Steps For Carrying Out Radiographic Testing On Weld: 5. Calculate Exposure Time For Actual SOD (SOD-A)Document7 pagesSteps For Carrying Out Radiographic Testing On Weld: 5. Calculate Exposure Time For Actual SOD (SOD-A)CheeragNo ratings yet
- 00000548c PDFDocument90 pages00000548c PDFlipNo ratings yet
- Measuring Fillet Weld Size It's Easy Right - Karsten Madsen - Pulse - LinkedInDocument5 pagesMeasuring Fillet Weld Size It's Easy Right - Karsten Madsen - Pulse - LinkedInnkvonNo ratings yet
- Welding - Joint - Symbols ISO 2553Document32 pagesWelding - Joint - Symbols ISO 2553Silvio ZappinoNo ratings yet
- WPS 856110.016 Rev 3Document1 pageWPS 856110.016 Rev 3laz_kNo ratings yet
- Simboluri SudareDocument8 pagesSimboluri SudarecornelutsNo ratings yet
- A L F I: Cceptance Imit OR MperfectionsDocument29 pagesA L F I: Cceptance Imit OR MperfectionsDavid MacatangayNo ratings yet
- Handout Ultrasonic Testing Level II - Rev. 1 - 12 May 2010Document185 pagesHandout Ultrasonic Testing Level II - Rev. 1 - 12 May 2010deari nur azisNo ratings yet
- The Everyday Pocket Handbook For Arc Welding Steel: A SeriesDocument34 pagesThe Everyday Pocket Handbook For Arc Welding Steel: A SeriesSamir Morales CadilloNo ratings yet
- ANSI B36.10 Steel PipesDocument8 pagesANSI B36.10 Steel Pipesphoneme79No ratings yet
- ASNTDocument5 pagesASNTshifaNo ratings yet
- Cswip 3.1 QuizDocument70 pagesCswip 3.1 Quizalzaki100% (1)
- Fastener Size Tables - MechaniCalcDocument14 pagesFastener Size Tables - MechaniCalcperdhana2000No ratings yet
- Welding AWS B1.11Document22 pagesWelding AWS B1.11Ali SASSINo ratings yet
- Ut Procedure AwsDocument23 pagesUt Procedure AwsEdAlmNo ratings yet
- Welding Inspection: BS 499 Part 2 Course Reference WIS 5Document11 pagesWelding Inspection: BS 499 Part 2 Course Reference WIS 5aezeadNo ratings yet
- WRI Brochure 2016-17Document25 pagesWRI Brochure 2016-17Swapnil Rupaye100% (1)
- Impact of Non-Destructive Testing: Proceedings of the 28th Annual British Conference on Non-Destructive Testing, Sheffield, UK, 18-21 September 1989From EverandImpact of Non-Destructive Testing: Proceedings of the 28th Annual British Conference on Non-Destructive Testing, Sheffield, UK, 18-21 September 1989C. BrookNo ratings yet
- Ultrasonic TOFD Flaw Sizing and Imaging in Thin Plates Using Embedded Signal Identification Technique (ESIT)Document6 pagesUltrasonic TOFD Flaw Sizing and Imaging in Thin Plates Using Embedded Signal Identification Technique (ESIT)Sridharan ChandranNo ratings yet
- Ultrasonic Crack Depth Measurement of Surface Bracking Cracks in PipingDocument8 pagesUltrasonic Crack Depth Measurement of Surface Bracking Cracks in Pipingcal2_uniNo ratings yet
- Shear Waves On TofdDocument18 pagesShear Waves On TofdmonokoeNo ratings yet
- Immersion and TOFD (I-TOFD) : A Novel Combination For Examination of Lower ThicknessesDocument6 pagesImmersion and TOFD (I-TOFD) : A Novel Combination For Examination of Lower ThicknessesDaniel Lvqve GarciaNo ratings yet
- N Executive Summary: Engineering-27Document2 pagesN Executive Summary: Engineering-27Anonymous 5qPKvmuTWCNo ratings yet
- 208 Murugaiyan CorrectedDocument8 pages208 Murugaiyan CorrectedalialatabyNo ratings yet
- A Novel Method For Ultrasonic Evaluation of HorizoDocument10 pagesA Novel Method For Ultrasonic Evaluation of Horizohernando gelvesNo ratings yet
- TOFD Dead Zone CalculatorDocument4 pagesTOFD Dead Zone CalculatorWill SmithNo ratings yet
- ToFD PDFDocument7 pagesToFD PDFParanthaman Jayaraman100% (1)
- Genralized Corrosion Cost AnalysisDocument34 pagesGenralized Corrosion Cost AnalysiscutefrenzyNo ratings yet
- RDC Product CatalogDocument4 pagesRDC Product CatalogcutefrenzyNo ratings yet
- Mek4450 Ife Day1 Lesson2Document32 pagesMek4450 Ife Day1 Lesson2cutefrenzyNo ratings yet
- Catalyst Chage OperationDocument59 pagesCatalyst Chage OperationcutefrenzyNo ratings yet
- Effect of Welding On Microstructure and Mechanical Properties of An Industrial Low Carbon SteelDocument5 pagesEffect of Welding On Microstructure and Mechanical Properties of An Industrial Low Carbon Steelmalika_00No ratings yet
- Mine Development: Surface WaterDocument10 pagesMine Development: Surface WatercutefrenzyNo ratings yet
- Tempil-Iron Carbon DiagramDocument1 pageTempil-Iron Carbon DiagramcutefrenzyNo ratings yet
- Oil & Gas Downstream - EN-weldingDocument22 pagesOil & Gas Downstream - EN-weldingcutefrenzyNo ratings yet
- Hfss 2way Thermal DimensionsDocument34 pagesHfss 2way Thermal DimensionscutefrenzyNo ratings yet
- Nozzle ProDocument185 pagesNozzle Progoodspeed_ph83% (6)
- Financial Management For Decision MakersDocument2 pagesFinancial Management For Decision MakerscutefrenzyNo ratings yet
- Corrdata Step GuideDocument8 pagesCorrdata Step GuidecutefrenzyNo ratings yet
- 64610Document11 pages64610cutefrenzyNo ratings yet
- ReadmeDocument1 pageReadmecutefrenzyNo ratings yet
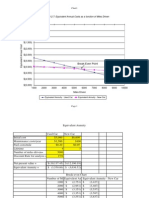
- Figure 12.7: Equivalent Annual Costs As A Function of Miles DrivenDocument3 pagesFigure 12.7: Equivalent Annual Costs As A Function of Miles DrivencutefrenzyNo ratings yet
- Rate VarianceDocument11 pagesRate VariancecutefrenzyNo ratings yet
- CAAP MPM Training Course Handout - Updated 30sep19Document70 pagesCAAP MPM Training Course Handout - Updated 30sep19Jan Mark Dela CruzNo ratings yet
- NDT Anchor Bolts Position PaperDocument12 pagesNDT Anchor Bolts Position Paperinsane88No ratings yet
- D6-4 Joint Acceptance Criteria DocumentDocument34 pagesD6-4 Joint Acceptance Criteria DocumentZia GondalNo ratings yet
- 06390G TocDocument5 pages06390G TocBhawani Singh RajawatNo ratings yet
- Syllabus of API 653 - Des2022Document4 pagesSyllabus of API 653 - Des2022markus andikaNo ratings yet
- NDT Methods NotesDocument1 pageNDT Methods NotesWeld Bro SandeepNo ratings yet
- TOFD Training BrochureDocument1 pageTOFD Training BrochureAhmed Ayman AhmedNo ratings yet
- Welcome: TechnologyDocument47 pagesWelcome: TechnologyRam RamuNo ratings yet
- BS EN ISO 23278-2009 MT AcceptanceDocument10 pagesBS EN ISO 23278-2009 MT AcceptanceVuong Tran Van100% (1)
- Compression Packages: C-SERIES ConfigurableDocument16 pagesCompression Packages: C-SERIES ConfigurableJose FavaNo ratings yet
- Quality Management System SystemDocument4 pagesQuality Management System SystemMario YañezNo ratings yet
- Harsha Resume 13Document3 pagesHarsha Resume 13shishobNo ratings yet
- BS en 462 3 1997 PDFDocument12 pagesBS en 462 3 1997 PDFMontserrat Bustios100% (1)
- ME6019-Non Destructive Testing and MaterialsDocument12 pagesME6019-Non Destructive Testing and Materialskarthick ram selvamNo ratings yet
- PV Ball Grinding Mill - GearlessDocument47 pagesPV Ball Grinding Mill - GearlessCarlos Plasencia PozoNo ratings yet
- ECAT NAMS Paper by Raju GDocument10 pagesECAT NAMS Paper by Raju GanishNo ratings yet
- Guia para Soldadura en Tuberia de ServicioDocument28 pagesGuia para Soldadura en Tuberia de ServicioAbel Lopez JoachinNo ratings yet
- ASTM E797 Pulso EcoDocument7 pagesASTM E797 Pulso Ecoing.chemicalNo ratings yet
- NDT ISO StandardsDocument1 pageNDT ISO StandardsFaizal DwiNo ratings yet
- Sae Ams2644h-2020Document3 pagesSae Ams2644h-2020Robert UrtadoNo ratings yet
- Technical Specifications of Steam GeneratorDocument3 pagesTechnical Specifications of Steam GeneratorROYALNEWSSNo ratings yet
- WATER TANK FABRICATIONdocxDocument11 pagesWATER TANK FABRICATIONdocxTrianto JatmikoNo ratings yet
- Qualification of Phased ArraysDocument55 pagesQualification of Phased Arrayssolrac4371No ratings yet
- WPQ Process As Per ISO-9606-1 2013Document4 pagesWPQ Process As Per ISO-9606-1 2013Md Anamul Hoque0% (1)