You might also like
- Don Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboFrom EverandDon Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboRating: 4.5 out of 5 stars4.5/5 (12)
- 2-G4. Travel DeviceDocument26 pages2-G4. Travel Devicedima65No ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. StructureANDREI26No ratings yet
- Group 3 Swing Device ComponentsDocument11 pagesGroup 3 Swing Device Componentsjesus mamani mezaNo ratings yet
- Estructura de JiroDocument11 pagesEstructura de Jirolevinton jose tobias genesNo ratings yet
- GROUP 3 SWING DEVICE (Up To #0373) : 1. StructureDocument21 pagesGROUP 3 SWING DEVICE (Up To #0373) : 1. StructureEle SalvadorNo ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. StructureWarranty HeadNo ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. StructureTrần Văn ChươngNo ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. StructurevitaliyNo ratings yet
- Section 2 Structure and Function: Group 1 Pump DeviceDocument18 pagesSection 2 Structure and Function: Group 1 Pump DeviceAndre STANo ratings yet
- GROUP 4 TRAVEL DEVICE CONSTRUCTION AND FUNCTIONDocument27 pagesGROUP 4 TRAVEL DEVICE CONSTRUCTION AND FUNCTIONAbdellahNo ratings yet
- 4T40E / 4T45E transmission overviewDocument8 pages4T40E / 4T45E transmission overviewJoe MontanaNo ratings yet
- 009-Transmissão 4t40-EDocument2 pages009-Transmissão 4t40-ECarlos Nogueira100% (1)
- R210LC-7 8-3Document29 pagesR210LC-7 8-3Krystian PalaciosNo ratings yet
- Section 2 Structure and FunctionDocument21 pagesSection 2 Structure and Functionjulio cesarNo ratings yet
- CVFVPADocument8 pagesCVFVPAmephir666No ratings yet
- Ahu'S Air Quantity Report: Customer: Telagana State Industrial Infrastructure CorporationDocument54 pagesAhu'S Air Quantity Report: Customer: Telagana State Industrial Infrastructure CorporationNagendra EtikalaNo ratings yet
- Stylus C79 D78 Parts List and Diagram PDFDocument6 pagesStylus C79 D78 Parts List and Diagram PDFDeniskoffNo ratings yet
- Stylus C79 D78 Parts List and DiagramDocument6 pagesStylus C79 D78 Parts List and DiagramDeniskoffNo ratings yet
- Stylus C79 D78 Parts List and Diagram PDFDocument6 pagesStylus C79 D78 Parts List and Diagram PDFDeniskoffNo ratings yet
- Structure and Function of Hydraulic ComponentsDocument79 pagesStructure and Function of Hydraulic ComponentsRafał DworakNo ratings yet
- g4015z PLDocument15 pagesg4015z PLIkhsan Nurul AkbarNo ratings yet
- Parts List: Parts No.: A099-0073 Revision Date: 12 May, 2003Document30 pagesParts List: Parts No.: A099-0073 Revision Date: 12 May, 2003Gaëlle HENNEBELNo ratings yet
- Group 3 Pump DeviceDocument24 pagesGroup 3 Pump DeviceTaha RdmanNo ratings yet
- Pit S4 PDFDocument2 pagesPit S4 PDFjohanes kharismaNo ratings yet
- VW 01M / 01P / 095 / 096: FWD 4 SPDDocument2 pagesVW 01M / 01P / 095 / 096: FWD 4 SPDAriel David LezaNo ratings yet
- Steel Hardness Conversion TableDocument6 pagesSteel Hardness Conversion TableSandipPatelNo ratings yet
- BPW Swivel Axle Workshop ManualDocument34 pagesBPW Swivel Axle Workshop ManualPiotr ZiąbkowskiNo ratings yet
- V12 Series Spare Parts CatalogDocument23 pagesV12 Series Spare Parts CatalogШилоNo ratings yet
- Plastic Film Capacitors: List of ContentsDocument15 pagesPlastic Film Capacitors: List of ContentsmohamadazareshNo ratings yet
- Group 3 Pump Device: 1. Removal and InstallDocument24 pagesGroup 3 Pump Device: 1. Removal and InstallANDREI26No ratings yet
- Epson ET-15000 L14150 Exploded DiagramDocument5 pagesEpson ET-15000 L14150 Exploded DiagramIon Ionut0% (3)
- 2-G1. Pump Device - Hyundai R360Document22 pages2-G1. Pump Device - Hyundai R360Wellington FrançaNo ratings yet
- Steel Hardness Conversion TableDocument2 pagesSteel Hardness Conversion TableRamazan MERALNo ratings yet
- Stylus C61 C62 Parts List and DiagramDocument7 pagesStylus C61 C62 Parts List and DiagramDeniskoffNo ratings yet
- EPSON STYLUS C61/C62 printer exploded views and part listsDocument7 pagesEPSON STYLUS C61/C62 printer exploded views and part listsDeniskoffNo ratings yet
- Stylus C61 C62 Parts List and Diagram PDFDocument7 pagesStylus C61 C62 Parts List and Diagram PDFDeniskoffNo ratings yet
- Pay Floor PlanDocument8 pagesPay Floor PlanLeonard TanNo ratings yet
- RWD 4 Speed Automatic Transmission Diagram and Label GuideDocument8 pagesRWD 4 Speed Automatic Transmission Diagram and Label GuideAlfredoNo ratings yet
- Hyundai HLE6 Motor Series SpecificationsDocument10 pagesHyundai HLE6 Motor Series SpecificationsRIZKY FIQRINo ratings yet
- HardnessDocument2 pagesHardnessRGanjvarNo ratings yet
- Capital Wedding Floor Plan - NewDocument1 pageCapital Wedding Floor Plan - NewnickNo ratings yet
- Installation instructions for PSI plastic insulator type GKO-gl and GKO-gs system DSIDocument2 pagesInstallation instructions for PSI plastic insulator type GKO-gl and GKO-gs system DSIleo salumbidesNo ratings yet
- Sales Data Book Sec 13 Page 6 Lubricant FittingDocument2 pagesSales Data Book Sec 13 Page 6 Lubricant FittingJuanpablinho Montero100% (3)
- Group 3 Pump DeviceDocument23 pagesGroup 3 Pump DeviceАндрей АлипьевNo ratings yet
- Bizhub Pro C6501-Parts ManualDocument287 pagesBizhub Pro C6501-Parts ManualBoldashNo ratings yet
- MWA Flange H, Z Og WDocument2 pagesMWA Flange H, Z Og WDanNo ratings yet
- 1 - Catalogo Rompedor Rhino RHB 325Document28 pages1 - Catalogo Rompedor Rhino RHB 325Marcelo ZucchiNo ratings yet
- Catalog A340 EtcDocument14 pagesCatalog A340 EtcHABUMUGISHA DieudonneNo ratings yet
- HP5000 Hydraulic Breaker Parts ManualDocument6 pagesHP5000 Hydraulic Breaker Parts ManualjendriNo ratings yet
- HY30 5513 M1 SparepartsDocument15 pagesHY30 5513 M1 SparepartsMohan CharanchathNo ratings yet
- Stylus C90 C91 C92 D92 Parts List and Diagram PDFDocument6 pagesStylus C90 C91 C92 D92 Parts List and Diagram PDFDeniskoffNo ratings yet
- Stylus C90 C91 C92 D92 Parts List and DiagramDocument6 pagesStylus C90 C91 C92 D92 Parts List and DiagramDeniskoffNo ratings yet
- RWD 3 Speed: JP (Automatic Transmissions) LTDDocument20 pagesRWD 3 Speed: JP (Automatic Transmissions) LTDJosé Arcadio Tuz MondragonNo ratings yet
- 31 Ford 3b Axod AxodeDocument22 pages31 Ford 3b Axod AxodeEdwinferNo ratings yet
- Ryobi.: 4-Color Offset PressDocument234 pagesRyobi.: 4-Color Offset PressLe Duy PhuocNo ratings yet
- Section 2 Structure and Function: Group 1 Pump DeviceDocument19 pagesSection 2 Structure and Function: Group 1 Pump Deviceluis eduardo corzo enriquezNo ratings yet
- ZF4HP22 transmission diagramDocument10 pagesZF4HP22 transmission diagramAussi SidNo ratings yet
- Epson CX8300 Service ManualDocument8 pagesEpson CX8300 Service Manualtotti6633No ratings yet
- Group 5 Swing Device: 1. Removal and Install of MotorDocument23 pagesGroup 5 Swing Device: 1. Removal and Install of MotorгриоиийNo ratings yet
- Engine ElectricalDocument99 pagesEngine Electricalluis eduardo corzo enriquezNo ratings yet
- Motor Grader Hyd SchemDocument2 pagesMotor Grader Hyd Schemssinokrot100% (2)
- Group 6 RCV Pedal: 1. StructureDocument6 pagesGroup 6 RCV Pedal: 1. StructureАлексейNo ratings yet
- SM PC200, PC200LC-7Document810 pagesSM PC200, PC200LC-7caing92% (13)
- Configuration DiagramsDocument25 pagesConfiguration Diagramsluis eduardo corzo enriquezNo ratings yet
- 12G, 130G & 140G Hydraulic System Motor Graders: 61M6940-UP 74V1525-UP 72V3722-UPDocument2 pages12G, 130G & 140G Hydraulic System Motor Graders: 61M6940-UP 74V1525-UP 72V3722-UPErnesto Rodriguez Gonzalez100% (1)
- Testing and Adjusting Hydraulic System: Shutdown SIS Previous ScreenDocument55 pagesTesting and Adjusting Hydraulic System: Shutdown SIS Previous Screenluis eduardo corzo enriquezNo ratings yet
- Group 2 Specifications: 1. Major ComponentDocument21 pagesGroup 2 Specifications: 1. Major Componentluis eduardo corzo enriquezNo ratings yet
- Uptime Maintenance Planner: Service IntervalsDocument2 pagesUptime Maintenance Planner: Service Intervalsluis eduardo corzo enriquezNo ratings yet
- 962g Trans Clutch CalibrateDocument8 pages962g Trans Clutch Calibrateluis eduardo corzo enriquez100% (1)
- F350 Fuse BoxDocument1 pageF350 Fuse Boxluis eduardo corzo enriquezNo ratings yet
- 962g Trans TestDocument14 pages962g Trans Testluis eduardo corzo enriquezNo ratings yet
- GROUP 5 RCV LEVER TITLEDocument8 pagesGROUP 5 RCV LEVER TITLEJuan Pablo Leon RualesNo ratings yet
- Section 2 Structure and Function: Group 1 Pump DeviceDocument19 pagesSection 2 Structure and Function: Group 1 Pump Deviceluis eduardo corzo enriquezNo ratings yet
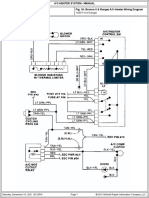
- F350 Elec Diag 2Document1 pageF350 Elec Diag 2luis eduardo corzo enriquezNo ratings yet
- PC300 electrical diagramsDocument33 pagesPC300 electrical diagramsluis eduardo corzo enriquezNo ratings yet
- F350 Elec Diag 3Document1 pageF350 Elec Diag 3luis eduardo corzo enriquezNo ratings yet
- F350 Elec Diag 1Document1 pageF350 Elec Diag 1luis eduardo corzo enriquezNo ratings yet
- TCC Clutch Solenoid DiagDocument1 pageTCC Clutch Solenoid Diagluis eduardo corzo enriquezNo ratings yet
- F350 Elec Diag 4Document1 pageF350 Elec Diag 4luis eduardo corzo enriquezNo ratings yet
- Ignition System: General InformationDocument38 pagesIgnition System: General Informationluis eduardo corzo enriquezNo ratings yet
- Voyager97 Wiring DiagrDocument490 pagesVoyager97 Wiring Diagrluis eduardo corzo enriquezNo ratings yet
- Ranger Rear Anti-Lockbrake SystemDocument1 pageRanger Rear Anti-Lockbrake Systemluis eduardo corzo enriquezNo ratings yet
- Ranger 89 Ac ControlDocument1 pageRanger 89 Ac Controlluis eduardo corzo enriquezNo ratings yet
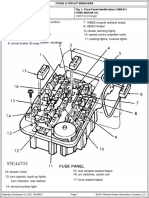
- Ranger 89 Fuse PanelDocument1 pageRanger 89 Fuse Panelluis eduardo corzo enriquezNo ratings yet
- Instrument PanelDocument1 pageInstrument Panelluis eduardo corzo enriquezNo ratings yet
- Transaxle and Power Transfer Unit - Voyager GS 1996 - PDFs Free OnlineDocument182 pagesTransaxle and Power Transfer Unit - Voyager GS 1996 - PDFs Free Onlineluis eduardo corzo enriquezNo ratings yet
- HEGO Sensor DiagDocument1 pageHEGO Sensor Diagluis eduardo corzo enriquezNo ratings yet
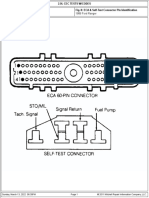
- Ecu y Conector Test PinsDocument1 pageEcu y Conector Test Pinsluis eduardo corzo enriquezNo ratings yet
- Geotechnical Grouting Highway Pavement StabilizationDocument45 pagesGeotechnical Grouting Highway Pavement StabilizationNikola GlisicNo ratings yet
- JSW Inquiry - OHE-1Document6 pagesJSW Inquiry - OHE-1Amit AgrawalNo ratings yet
- TBI: Throttle Body Injection System OverviewDocument30 pagesTBI: Throttle Body Injection System OverviewShzllNo ratings yet
- Buggy: Operator'S Maintenance Service and Spare Parts ManualDocument40 pagesBuggy: Operator'S Maintenance Service and Spare Parts ManualRamji Gopinath50% (2)
- Maliha - Q88 10th Dec 19Document12 pagesMaliha - Q88 10th Dec 19himaanshumohanNo ratings yet
- Selec T: Electronically Controlled Variable Displacement Compressor (ECV) Diagnostic Tool Kit P/N 69636Document2 pagesSelec T: Electronically Controlled Variable Displacement Compressor (ECV) Diagnostic Tool Kit P/N 69636home businessNo ratings yet
- Shell Spirax S5 CVT X: Performance, Features & Benefits Specifications, Approvals & RecommendationsDocument2 pagesShell Spirax S5 CVT X: Performance, Features & Benefits Specifications, Approvals & RecommendationsTom TomNo ratings yet
- Breakdown BreakdownDocument5 pagesBreakdown Breakdownanha rianaNo ratings yet
- PSSR exam questions and answersDocument12 pagesPSSR exam questions and answersKarthik AbishNo ratings yet
- Cruisers For BreakfastDocument3 pagesCruisers For BreakfastPanos ThalassisNo ratings yet
- Social Eot Worksheet Grade 1Document5 pagesSocial Eot Worksheet Grade 1Ezzeldin Khater Shimaa NoorNo ratings yet
- BT-PSSR Student HandoutDocument20 pagesBT-PSSR Student HandoutMJ Galang100% (1)
- Yaris GR Specs - Google SearchDocument1 pageYaris GR Specs - Google Search4jpdzdjw7bNo ratings yet
- ADOT Specific Requirements For SSL's MSE Plus Concrete Panel Wall SystemDocument24 pagesADOT Specific Requirements For SSL's MSE Plus Concrete Panel Wall SystemDiegoDiazBarrantesNo ratings yet
- Management Accounting Principles:: Maruti Suzuki India Ltd. & Bajaj Auto LTDDocument11 pagesManagement Accounting Principles:: Maruti Suzuki India Ltd. & Bajaj Auto LTDShubhankar DasNo ratings yet
- Site Development Plan Standards - DraftDocument26 pagesSite Development Plan Standards - DraftWanda VersterNo ratings yet
- 2020-07-01 Classic FordDocument100 pages2020-07-01 Classic FordTranzmitterNo ratings yet
- Automatic Emergency Brake System GuideDocument19 pagesAutomatic Emergency Brake System GuideKrysalisNo ratings yet
- Geography - Chapter 7 - Lifelines of National Economy - Handwritten Notes - Geography - Chapter 7 - Lifelines of National Economy - Handwritten NotesDocument16 pagesGeography - Chapter 7 - Lifelines of National Economy - Handwritten Notes - Geography - Chapter 7 - Lifelines of National Economy - Handwritten NotesSaket RajNo ratings yet
- Re Diesel Bs4 ProvisionalDocument81 pagesRe Diesel Bs4 ProvisionalBikash DhaliNo ratings yet
- Experienced Railway Signalling EngineerDocument2 pagesExperienced Railway Signalling Engineerm sherNo ratings yet
- Overview of The Local Public Transport Route Plan of Butuan CityDocument18 pagesOverview of The Local Public Transport Route Plan of Butuan Cityclinton john minglanaNo ratings yet
- Camber Alloy SchematicsDocument2 pagesCamber Alloy SchematicsAlexander GomezNo ratings yet
- Service/ PPM Report - CD PUMPDocument2 pagesService/ PPM Report - CD PUMPYasir MehmoodNo ratings yet
- The Air Travel Customer Experience Map - Blueberry Group - 21GBADocument1 pageThe Air Travel Customer Experience Map - Blueberry Group - 21GBAduyenhk.21baNo ratings yet
- TQPFDocument5 pagesTQPFAlexandre AlvesNo ratings yet
- Mr. Nussbaum - Plymouth Colony Reading Comprehension - OnlineDocument1 pageMr. Nussbaum - Plymouth Colony Reading Comprehension - OnlineSANDRA ASAADNo ratings yet
- Faarfield: FAARFIELD V 1.42 - Airport Pavement DesignDocument2 pagesFaarfield: FAARFIELD V 1.42 - Airport Pavement DesignPablo Andres Hernandez RodriguezNo ratings yet
- gkfn ;8s ;'/Iff sfo{ofhgfDocument52 pagesgkfn ;8s ;'/Iff sfo{ofhgftilak gahaNo ratings yet
- What Is A Monkey Island On ShipsDocument7 pagesWhat Is A Monkey Island On ShipsstamatisNo ratings yet