You might also like
- Don Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboFrom EverandDon Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboRating: 4.5 out of 5 stars4.5/5 (12)
- Section 2 Structure and FunctionDocument79 pagesSection 2 Structure and FunctionRafał DworakNo ratings yet
- Section 2 Structure and FunctionDocument21 pagesSection 2 Structure and Functionjulio cesarNo ratings yet
- Section 2 Structure and FunctionDocument42 pagesSection 2 Structure and FunctionRached Douahchua100% (1)
- Section 2 Structure and Function: Group 1 Pump DeviceDocument18 pagesSection 2 Structure and Function: Group 1 Pump DeviceAndre STANo ratings yet
- Group 3 Pump DeviceDocument23 pagesGroup 3 Pump DeviceАндрей АлипьевNo ratings yet
- Section 2 Structure and Function: Group 1 Pump DeviceDocument19 pagesSection 2 Structure and Function: Group 1 Pump Deviceluis eduardo corzo enriquezNo ratings yet
- Kato 5 Plunger PumpDocument37 pagesKato 5 Plunger PumpStormNo ratings yet
- Group 3 Pump DeviceDocument24 pagesGroup 3 Pump DeviceTaha RdmanNo ratings yet
- Group 3 Pump DeviceDocument23 pagesGroup 3 Pump DeviceDeyvi Cconocuyca HuallparimachiNo ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. StructureWarranty HeadNo ratings yet
- G Group 3 Pump Device: 1. Removal and InstallDocument24 pagesG Group 3 Pump Device: 1. Removal and InstallTaha RdmanNo ratings yet
- Dispositvo ViagemDocument47 pagesDispositvo ViagemmarpsonNo ratings yet
- Hyundai 250 LCDocument20 pagesHyundai 250 LCLuis Mendez100% (1)
- Group 3 Pump Device: 1. Removal and InstallDocument22 pagesGroup 3 Pump Device: 1. Removal and InstallSergey MovchanNo ratings yet
- Group 3 Swing Device Group 3 Swing Device (Type 1) : 1. StructureDocument21 pagesGroup 3 Swing Device Group 3 Swing Device (Type 1) : 1. StructureAndriela LopesNo ratings yet
- SP600,700 SM #475JD PDFDocument89 pagesSP600,700 SM #475JD PDFDaniel gNo ratings yet
- Group 3 Pump DeviceDocument23 pagesGroup 3 Pump Devicedeniden2013No ratings yet
- Pump, Description: Model CodeDocument4 pagesPump, Description: Model CodeNaing Min HtunNo ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. Structurejesus mamani mezaNo ratings yet
- Group 3 Pump DeviceDocument23 pagesGroup 3 Pump DeviceDavidNo ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. StructurevitaliyNo ratings yet
- 2 1 PDFDocument18 pages2 1 PDFالمهندسوليدالطويلNo ratings yet
- Group 3 Pump DeviceDocument24 pagesGroup 3 Pump DeviceTaha RdmanNo ratings yet
- NP1 5Document2 pagesNP1 5Elinton De Jesus SarmientoNo ratings yet
- YAMADA NDP-80BPT Bill of MaterialDocument3 pagesYAMADA NDP-80BPT Bill of MaterialBrian AnguloNo ratings yet
- R480R520LC-9S 2Document22 pagesR480R520LC-9S 2abbessisayf12345No ratings yet
- Estructura de JiroDocument11 pagesEstructura de Jirolevinton jose tobias genesNo ratings yet
- Air Winch: Instructions, Parts and Maintenance ManualDocument36 pagesAir Winch: Instructions, Parts and Maintenance ManualNaDeem NmsNo ratings yet
- DX5 Cross Sectional PDFDocument6 pagesDX5 Cross Sectional PDFnicol_sgNo ratings yet
- Spare Part Request List Doosan PU086TIDocument12 pagesSpare Part Request List Doosan PU086TIPak ItamNo ratings yet
- Group 3 Pump Device: 1. Removal and InstallDocument24 pagesGroup 3 Pump Device: 1. Removal and InstallANDREI26No ratings yet
- Group 3 Swing Device: 1. StructureDocument11 pagesGroup 3 Swing Device: 1. StructureANDREI26No ratings yet
- 2.structure and FunctionDocument30 pages2.structure and FunctionOscar Tello HuaripataNo ratings yet
- Penske 7800 Technical ManualDocument12 pagesPenske 7800 Technical ManualgeorgeNo ratings yet
- Yamada Ndp-50bps-Pp Bill of MaterialDocument2 pagesYamada Ndp-50bps-Pp Bill of MaterialJose VidalNo ratings yet
- Part - Kobelco SK07 N2Document3 pagesPart - Kobelco SK07 N2boy qsiNo ratings yet
- Waukesha PL 5050 Partspucp WCBDocument22 pagesWaukesha PL 5050 Partspucp WCBsabasthianNo ratings yet
- R210LC-7 8-3Document29 pagesR210LC-7 8-3Krystian PalaciosNo ratings yet
- 2 3 PDFDocument9 pages2 3 PDFHuy SangNo ratings yet
- Caterpillar Parts List: Item Part No. QuantityDocument19 pagesCaterpillar Parts List: Item Part No. QuantityAKshayNo ratings yet
- 7300 Penske ManualDocument26 pages7300 Penske ManualZhi Hou NgNo ratings yet
- Roller Motor Circuit Routing: Hose No Assembly (Port To Port)Document10 pagesRoller Motor Circuit Routing: Hose No Assembly (Port To Port)SandipTakalikarNo ratings yet
- Bomba Blackmer GX2.5Document4 pagesBomba Blackmer GX2.5Arturo VillenaNo ratings yet
- SSP-384 2nd Edition Lycoming Engine ToolsDocument53 pagesSSP-384 2nd Edition Lycoming Engine ToolsKamal Jit DhimanNo ratings yet
- Componentes Hidráulicos (SK210 Y SK330)Document38 pagesComponentes Hidráulicos (SK210 Y SK330)alexis reyes100% (35)
- Service Replacements For Noncurrent Piston Pumps 6E-1278 120G 4HDDocument15 pagesService Replacements For Noncurrent Piston Pumps 6E-1278 120G 4HDpacman2803No ratings yet
- Lycoming Special ToolsDocument52 pagesLycoming Special ToolsVarman Aviation Quality DeptNo ratings yet
- Desplazamiento Del Motor TranslaciónDocument18 pagesDesplazamiento Del Motor Translaciónlevinton jose tobias genesNo ratings yet
- Cub Cadet Parts Manual For Model 382 Gear and 383Document8 pagesCub Cadet Parts Manual For Model 382 Gear and 383Michael100% (44)
- Culligan HiFlo2 - Parts ListDocument10 pagesCulligan HiFlo2 - Parts ListintermountainwaterNo ratings yet
- Butterfly Valve, Grooved End, Globe, Model GLR300GDocument9 pagesButterfly Valve, Grooved End, Globe, Model GLR300Grahu2260No ratings yet
- PBM Sanitary Ball ValvesDocument40 pagesPBM Sanitary Ball ValvesAnonymous bTvqZMftNo ratings yet
- Swing AirDocument3 pagesSwing AirJimmy K CerratoNo ratings yet
- Honda Wave 100, 100S 2005Document88 pagesHonda Wave 100, 100S 2005hwahydNo ratings yet
- Tanabe Air Compressor 20190514134900Document16 pagesTanabe Air Compressor 20190514134900Naqqash SajidNo ratings yet
- Exploded View & Parts Listing Air Operated Double Diaphragm PumpDocument2 pagesExploded View & Parts Listing Air Operated Double Diaphragm PumpCarlos AvalosNo ratings yet
- Vetec 62.7 Sanson Plug Tipo CanflexDocument12 pagesVetec 62.7 Sanson Plug Tipo CanflexAnderson SiqueiraNo ratings yet
- 3. محرك الدورانDocument14 pages3. محرك الدورانالمهندسوليدالطويلNo ratings yet
- Problema Alta VoltagemDocument2 pagesProblema Alta VoltagemWellington FrançaNo ratings yet
- 1-G2. Specification - Hyundai R360Document16 pages1-G2. Specification - Hyundai R360Wellington FrançaNo ratings yet
- Section 1 GeneralDocument10 pagesSection 1 GeneralSergey MovchanNo ratings yet
- Glosario de Terminos CAT en Ingles PDFDocument92 pagesGlosario de Terminos CAT en Ingles PDFRicardo AndradeNo ratings yet
- Tabla Blow by MotoresDocument1 pageTabla Blow by MotoresEricsson Via100% (1)
- Overhaul InfoDocument1 pageOverhaul Infomohamed hamedNo ratings yet
- Magnetism: Systems Operation - FundamentalsDocument9 pagesMagnetism: Systems Operation - FundamentalsWellington FrançaNo ratings yet
- Voltagem em CircuitosDocument8 pagesVoltagem em CircuitosWellington FrançaNo ratings yet
- 980G Underground Mining ApplicationDocument14 pages980G Underground Mining ApplicationWellington FrançaNo ratings yet
- Principios DeTranferência de CalorDocument10 pagesPrincipios DeTranferência de CalorWellington FrançaNo ratings yet
- Básico de cIRCUITOS ELETRICOSDocument10 pagesBásico de cIRCUITOS ELETRICOSWellington FrançaNo ratings yet
- Válvula de Expansao Tipo HDocument4 pagesVálvula de Expansao Tipo HWellington FrançaNo ratings yet
- Arcondicionadocom Tubo de OrificioDocument10 pagesArcondicionadocom Tubo de OrificioWellington FrançaNo ratings yet
- 2014 - Intelligence As A Predictor of Outcome in Short-And Long-Term PsychotherapyDocument9 pages2014 - Intelligence As A Predictor of Outcome in Short-And Long-Term PsychotherapyZayne CarrickNo ratings yet
- Dog & Kitten: XshaperDocument17 pagesDog & Kitten: XshaperAll PrintNo ratings yet
- Chakir Sara 2019Document25 pagesChakir Sara 2019hiba toubaliNo ratings yet
- Acoustic Glass - ENDocument2 pagesAcoustic Glass - ENpeterandreaNo ratings yet
- SCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Document2 pagesSCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Nguyễn Hồng AnhNo ratings yet
- CL Honours Report NamanDocument11 pagesCL Honours Report NamanNaman VermaNo ratings yet
- 2010 - Howaldt y Schwarz - Social Innovation-Concepts, Research Fields and International - LibroDocument82 pages2010 - Howaldt y Schwarz - Social Innovation-Concepts, Research Fields and International - Librovallejo13No ratings yet
- Taylor Series PDFDocument147 pagesTaylor Series PDFDean HaynesNo ratings yet
- PTW Site Instruction NewDocument17 pagesPTW Site Instruction NewAnonymous JtYvKt5XENo ratings yet
- Amity School of Business:, Semester IV Research Methodology and Report Preparation Dr. Deepa KapoorDocument23 pagesAmity School of Business:, Semester IV Research Methodology and Report Preparation Dr. Deepa KapoorMayank TayalNo ratings yet
- Entrepreneurial Capacity Building: A Study of Small and Medium Family-Owned Enterprisesin PakistanDocument3 pagesEntrepreneurial Capacity Building: A Study of Small and Medium Family-Owned Enterprisesin PakistanMamoonaMeralAysunNo ratings yet
- Quality Standards For ECCE INDIA PDFDocument41 pagesQuality Standards For ECCE INDIA PDFMaryam Ben100% (4)
- Section 1 Company Overview StandardsDocument34 pagesSection 1 Company Overview StandardsChris MedeirosNo ratings yet
- 5steps To Finding Your Workflow: by Nathan LozeronDocument35 pages5steps To Finding Your Workflow: by Nathan Lozeronrehabbed100% (2)
- OTP User Manual For English) v1,0Document15 pagesOTP User Manual For English) v1,0auyinNo ratings yet
- AP8 Q4 Ip9 V.02Document7 pagesAP8 Q4 Ip9 V.02nikka suitadoNo ratings yet
- English For Academic and Professional Purposes - ExamDocument3 pagesEnglish For Academic and Professional Purposes - ExamEddie Padilla LugoNo ratings yet
- LC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Document2 pagesLC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Mahadi Hassan ShemulNo ratings yet
- Pitch DeckDocument21 pagesPitch DeckIANo ratings yet
- SSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Document22 pagesSSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Ivy JeanneNo ratings yet
- AMS ANALITICA-AIRFLOW TSP-HVS BrochureDocument1 pageAMS ANALITICA-AIRFLOW TSP-HVS BrochureShady HellaNo ratings yet
- Chapter 2 Short-Term SchedulingDocument49 pagesChapter 2 Short-Term SchedulingBOUAZIZ LINANo ratings yet
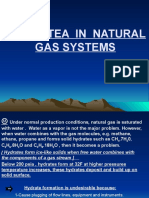
- Chapter 2 HydrateDocument38 pagesChapter 2 HydrateTaha Azab MouridNo ratings yet
- ISO Position ToleranceDocument15 pagesISO Position ToleranceНиколай КалугинNo ratings yet
- Third Party Risk Management Solution - WebDocument16 pagesThird Party Risk Management Solution - Webpreenk8No ratings yet
- Press Statement - Book Launching Shariah Forensic 27 Oct 2023Document4 pagesPress Statement - Book Launching Shariah Forensic 27 Oct 2023aNo ratings yet
- Concrete Pumping.: Squeeze PumpsDocument2 pagesConcrete Pumping.: Squeeze PumpsALINDA BRIANNo ratings yet
- VOTOL EMController Manual V2.0Document18 pagesVOTOL EMController Manual V2.0Nandi F. ReyhanNo ratings yet
- Template Budget ProposalDocument4 pagesTemplate Budget ProposalimamNo ratings yet
- Plan Lectie Clasa 5 D HaineDocument5 pagesPlan Lectie Clasa 5 D HaineCristina GrapinoiuNo ratings yet
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (9)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceFrom EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNo ratings yet
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsFrom EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNo ratings yet