You might also like
- Sharma 2018 IOP Conf. Ser. - Mater. Sci. Eng. 402 012056Document10 pagesSharma 2018 IOP Conf. Ser. - Mater. Sci. Eng. 402 012056MOHD NOR FAKHZAN MOHD KAZIMNo ratings yet
- Design of A Bracing-Friction Damper System For Seismic RetrofittingDocument13 pagesDesign of A Bracing-Friction Damper System For Seismic RetrofittingNovembre DuemilanoveNo ratings yet
- Blasting Vibration Safety Criterion For A Tunnel Liner StructureDocument7 pagesBlasting Vibration Safety Criterion For A Tunnel Liner StructurepramuktiNo ratings yet
- Effect of Creep, Shrinkage and Cracking On Time Dependent Behaviour of RC StructuresDocument7 pagesEffect of Creep, Shrinkage and Cracking On Time Dependent Behaviour of RC StructuresLavinia DamianNo ratings yet
- Fatigueof Coiled Tubingandits Influencing Factors AComparative StudyDocument8 pagesFatigueof Coiled Tubingandits Influencing Factors AComparative StudyLuis PinoNo ratings yet
- Analysis of Strip Residual CurvaturesDocument9 pagesAnalysis of Strip Residual CurvaturesSachin JadhavNo ratings yet
- Experimental Study of SS304L Cylindrical Shell WitDocument10 pagesExperimental Study of SS304L Cylindrical Shell WitVPN NetworkNo ratings yet
- Method For Evaluating Bolt Competitive Failure Life Under Composite ExcitationDocument13 pagesMethod For Evaluating Bolt Competitive Failure Life Under Composite ExcitationMassriyady MassaguniNo ratings yet
- s12206 016 0836 8Document8 pagess12206 016 0836 8gen liNo ratings yet
- 2021 - Dynamic Numerical Simulation Analysis of A Large Caliber PDFDocument7 pages2021 - Dynamic Numerical Simulation Analysis of A Large Caliber PDFzebrazerozeroNo ratings yet
- Pagination JIJF 106747Document3 pagesPagination JIJF 106747Tayeb KebirNo ratings yet
- Shear Failure Mechanism of Reinforced Concrete Haunched BeamsDocument16 pagesShear Failure Mechanism of Reinforced Concrete Haunched BeamsalpegambarliNo ratings yet
- Adaptiveobserver BasedoptimumtrackingcontrolDocument23 pagesAdaptiveobserver BasedoptimumtrackingcontrolMejbahul SarkerNo ratings yet
- Analysis of Parameter Sensitivity On Dynamics of Satellite SeparationDocument13 pagesAnalysis of Parameter Sensitivity On Dynamics of Satellite SeparationHa Hoang JRNo ratings yet
- Rizal 2005Document7 pagesRizal 2005Sairam PeddiNo ratings yet
- Rathinam 2009 Ext PreDocument12 pagesRathinam 2009 Ext PreH VNo ratings yet
- 1 s2.0 S0141029623005874 MainDocument17 pages1 s2.0 S0141029623005874 Main陈湘恒No ratings yet
- Vib 140 01 014501Document8 pagesVib 140 01 014501MARTINA ESTEBAN MORELLONo ratings yet
- Numerical Simulation of Welding Residual Stress Distribution On T-Joint Fillet StructureDocument11 pagesNumerical Simulation of Welding Residual Stress Distribution On T-Joint Fillet StructureBesaNo ratings yet
- Processes: Static Behaviors and Applications of Buckling Monitoring Members With Rigid EndsDocument22 pagesProcesses: Static Behaviors and Applications of Buckling Monitoring Members With Rigid EndsNanak BatraNo ratings yet
- Prediction of Available Rotation Capacity and Ductility of Wide-Flange Beams2Document18 pagesPrediction of Available Rotation Capacity and Ductility of Wide-Flange Beams2stefanaNo ratings yet
- 02.drill String Vibration Modeling Including Coupling EffectsDocument8 pages02.drill String Vibration Modeling Including Coupling Effectssobhan mohammadiNo ratings yet
- ManuscriptDocument40 pagesManuscriptdony sulistionoNo ratings yet
- Simulation and Experimental Research of The Free Bending Process of A Spatial TubeDocument38 pagesSimulation and Experimental Research of The Free Bending Process of A Spatial Tubeعلي مؤيد مطشر صدامNo ratings yet
- Vibration of Delaminated CompositesDocument21 pagesVibration of Delaminated CompositesHIMANSHU KUMARNo ratings yet
- Springback of Thin-Walled Tube NC Precision Bending and Its Numerical SimulationDocument8 pagesSpringback of Thin-Walled Tube NC Precision Bending and Its Numerical SimulationYasser BouktirNo ratings yet
- Direct Strength Method To The Design of Castellated Steel BeamDocument16 pagesDirect Strength Method To The Design of Castellated Steel BeamAdnan NajemNo ratings yet
- Zhang 2023 J. Phys. Conf. Ser. 2449 012021Document12 pagesZhang 2023 J. Phys. Conf. Ser. 2449 012021RobertoNo ratings yet
- Nonlinear Cyclic Truss Model For Shear-Critical Reinforced Concrete ColumnsDocument11 pagesNonlinear Cyclic Truss Model For Shear-Critical Reinforced Concrete Columnsfernando trujillano sarmientoNo ratings yet
- Stability of A-Jack Concrete Block Armors Protecting The RiverbedsDocument12 pagesStability of A-Jack Concrete Block Armors Protecting The RiverbedsShubham ShindeNo ratings yet
- Mechanics of Deepwater Steel Catenary Riser: September 2011Document29 pagesMechanics of Deepwater Steel Catenary Riser: September 2011Ashin VargheseNo ratings yet
- Vortex Flow Past A Sphere in A Constant-Diameter Pipe: Maui, Hawaii, USA, June 19-24, 2011Document1 pageVortex Flow Past A Sphere in A Constant-Diameter Pipe: Maui, Hawaii, USA, June 19-24, 2011esutjiadiNo ratings yet
- Seismic Performance of R.C. Frames With Vertical StiffnessDocument7 pagesSeismic Performance of R.C. Frames With Vertical StiffnessAmrar AbdelazizNo ratings yet
- SepulvedaDocument6 pagesSepulvedaAswini NRNo ratings yet
- Journalof Applied Mechanics Modelingand Analysisofthe Rope Sheave Interactionat Traction InterfaceDocument10 pagesJournalof Applied Mechanics Modelingand Analysisofthe Rope Sheave Interactionat Traction InterfaceNelson Andres Moreno AriasNo ratings yet
- Dynamic Arrest of Propagating Buckles in Offshore Pipelines: Theodoro A. Netto, Stelios KyriakidesDocument2 pagesDynamic Arrest of Propagating Buckles in Offshore Pipelines: Theodoro A. Netto, Stelios KyriakidesCésar SantanaNo ratings yet
- Blasiak 2016-A Parametric and Dynamic Analysis of Non-Contacting Gas Face SealsDocument12 pagesBlasiak 2016-A Parametric and Dynamic Analysis of Non-Contacting Gas Face SealsMiguel Angel BeltranNo ratings yet
- Seismic Performance Improvement of Base-Isolated Structures Using A Semi-Active Tuned Mass DamperDocument28 pagesSeismic Performance Improvement of Base-Isolated Structures Using A Semi-Active Tuned Mass DamperJosé Manuel SoriaNo ratings yet
- 08jul201502074526 P SAHA 400-405Document6 pages08jul201502074526 P SAHA 400-405Ali HassenNo ratings yet
- Dynamic Analysis of Wake Characteristics of The CiDocument15 pagesDynamic Analysis of Wake Characteristics of The CiSamik MaitiNo ratings yet
- Experimental Behaviour of Anchor Bolts Under Pullout and Relaxation TestsDocument10 pagesExperimental Behaviour of Anchor Bolts Under Pullout and Relaxation Testsayman sobhyNo ratings yet
- Direct Second-Order Elastic Analysis For Steel Frame DesignDocument12 pagesDirect Second-Order Elastic Analysis For Steel Frame DesignSiripong KongsengNo ratings yet
- Development of Analytical Model of Bending Force During 3-Roller Conical Bending Process and Its Experimental VerificationDocument9 pagesDevelopment of Analytical Model of Bending Force During 3-Roller Conical Bending Process and Its Experimental VerificationAchref Ben MabroukNo ratings yet
- Analytical and Experimental Study of Toggle-Brace-Damper SystemsDocument10 pagesAnalytical and Experimental Study of Toggle-Brace-Damper SystemsJuan José Gómez GarcíaNo ratings yet
- Key Techniques in Simulating Comprehensive Anchor Behaviors by Large Deformation Finite Element AnalysisDocument14 pagesKey Techniques in Simulating Comprehensive Anchor Behaviors by Large Deformation Finite Element AnalysisShubhrajit MaitraNo ratings yet
- A Review of Gravure Coating SystemsDocument7 pagesA Review of Gravure Coating SystemsHiba NaserNo ratings yet
- Ratananikometal2015 PDFDocument13 pagesRatananikometal2015 PDFAndreas FangelNo ratings yet
- Assessing The Behaviour of RC Beams Subject To Significant Gravity LoadsDocument10 pagesAssessing The Behaviour of RC Beams Subject To Significant Gravity Loadssokamantyyahoo.com.phNo ratings yet
- Seismic Performance of Damped-Outrigger System Incorporating Buckling-Restrained BracesDocument12 pagesSeismic Performance of Damped-Outrigger System Incorporating Buckling-Restrained BracesAbhishekNo ratings yet
- Powder Technology: Y. Rama Murthy, K. Udaya BhaskarDocument12 pagesPowder Technology: Y. Rama Murthy, K. Udaya BhaskarAYDIN KOSENo ratings yet
- Seismic Dampers and The Factors Affecting Its Efficacy A Review PaperDocument5 pagesSeismic Dampers and The Factors Affecting Its Efficacy A Review PaperInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Discussion of Influence On Pile Quality by Removing Pile Foundation Casing With VibratorDocument6 pagesDiscussion of Influence On Pile Quality by Removing Pile Foundation Casing With VibratorRaja RajanNo ratings yet
- Effect of Partial Shear Interaction in SteelDocument8 pagesEffect of Partial Shear Interaction in SteelAzzam NahdiNo ratings yet
- Mechanical Analysis of Tubing String in Fracturing OperationDocument13 pagesMechanical Analysis of Tubing String in Fracturing OperationAlexandruVerdesNo ratings yet
- Computational Challenges in High Angle of Attack Ow: August 2011Document9 pagesComputational Challenges in High Angle of Attack Ow: August 2011Israel OluwagbemiNo ratings yet
- Report BakkerDocument17 pagesReport BakkerShaileshRastogiNo ratings yet
- Recht, Ipson - Ballistic Perforation DynamicsDocument7 pagesRecht, Ipson - Ballistic Perforation DynamicsVinicius AssuncaoNo ratings yet
- Design of Non-Flexural Members For Shear - Foster-1998Document11 pagesDesign of Non-Flexural Members For Shear - Foster-1998munnaiitrNo ratings yet
- 0993 ChikhDocument11 pages0993 ChikhMatías Pino YáñezNo ratings yet
- TOTUS Real TrueDocument6 pagesTOTUS Real TruefcoespitiamasterNo ratings yet
- United States: (12) Patent Application Publication (10) Pub. No.: US 2006/0131074 A1Document23 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2006/0131074 A1fcoespitiamasterNo ratings yet
- Owen Oil Tools Has Been Manufacturing Expendable RetrievableDocument7 pagesOwen Oil Tools Has Been Manufacturing Expendable RetrievablefcoespitiamasterNo ratings yet
- Fracture Gradient Prediction Zhang y Yin PAPER PDFDocument11 pagesFracture Gradient Prediction Zhang y Yin PAPER PDFalvarodimassimo04No ratings yet
- Single PDC Bit Run Parametric Evaluation and Optimization Effect On ROP With Considering Bit WearDocument14 pagesSingle PDC Bit Run Parametric Evaluation and Optimization Effect On ROP With Considering Bit WearfcoespitiamasterNo ratings yet
- Wilke and LeeDocument6 pagesWilke and LeeJorge Ramirez0% (1)
- Effect of Ground Water TableDocument3 pagesEffect of Ground Water TableahmedNo ratings yet
- Saddle AnalysisDocument17 pagesSaddle AnalysisPEJU0007No ratings yet
- GATE 2021 Test Series 1 1 PDFDocument6 pagesGATE 2021 Test Series 1 1 PDFSatyajit SahuNo ratings yet
- GFRP+Two WaySlab ThesisDocument175 pagesGFRP+Two WaySlab ThesisKrishnaa SubramanianNo ratings yet
- PM & UcmDocument23 pagesPM & UcmAb HadiNo ratings yet
- 3 - Fluid Kinematics and DynamicsDocument35 pages3 - Fluid Kinematics and DynamicsAbdullah AkishNo ratings yet
- Course No.: ECE F314 Course Title: Electromagnetic Fields and Microwave Engineering Instructor-In-Charge: Harish V. DixitDocument3 pagesCourse No.: ECE F314 Course Title: Electromagnetic Fields and Microwave Engineering Instructor-In-Charge: Harish V. DixitShantanu MishraNo ratings yet
- Built Up SectionDocument48 pagesBuilt Up SectionAboalmaail AlaminNo ratings yet
- Thin Walled Pressure Vessel Design Calculation TutorialDocument9 pagesThin Walled Pressure Vessel Design Calculation TutorialGeorge SamsonNo ratings yet
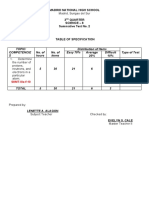
- Summative Test No. 1 Grade 8Document3 pagesSummative Test No. 1 Grade 8LENETTE ALAGONNo ratings yet
- Chapter 6 Thermodynamics StudentsDocument111 pagesChapter 6 Thermodynamics Studentsnur hashimahNo ratings yet
- Lakhmir Singh Solutions Class 9 Physics Chapter 1 MotionDocument57 pagesLakhmir Singh Solutions Class 9 Physics Chapter 1 Motionsandeep vermaNo ratings yet
- Ppr12 322alrDocument19 pagesPpr12 322alrgabemzamanNo ratings yet
- 4th Quarter Exam FinalDocument8 pages4th Quarter Exam FinalMaria Fe VibarNo ratings yet
- Orthonormal Quaternion Frames, Lagrangian Evolution Equations, and The Three-Dimensional Euler EquationsDocument26 pagesOrthonormal Quaternion Frames, Lagrangian Evolution Equations, and The Three-Dimensional Euler EquationsBenchmoham AmenNo ratings yet
- 7 Fluid Dynamics Tutorial SolutionDocument25 pages7 Fluid Dynamics Tutorial SolutionAldhaAhmadyaningratNo ratings yet
- Optimisation of Wind Turbine BladesDocument9 pagesOptimisation of Wind Turbine BladesmannoqamarNo ratings yet
- Definition of DiffractionDocument4 pagesDefinition of DiffractionLow Ban HengNo ratings yet
- Las2 PSDocument1 pageLas2 PSlukewendellrNo ratings yet
- PVT Experiment IndividualDocument36 pagesPVT Experiment IndividualnursyakirahrahimNo ratings yet
- Kinematics Practice Test: Section A. Multiple Choice Questions (10 Marks)Document6 pagesKinematics Practice Test: Section A. Multiple Choice Questions (10 Marks)Benni840809No ratings yet
- Department of Mechanical Engineering, Amity School of Engineering Technology Amity University Uttar PradeshDocument12 pagesDepartment of Mechanical Engineering, Amity School of Engineering Technology Amity University Uttar PradeshPRASENJIT MUKHERJEENo ratings yet
- Underground Pipe Stress Check - UGP 2: Design CalculationDocument9 pagesUnderground Pipe Stress Check - UGP 2: Design CalculationSana UllahNo ratings yet
- Simulation of Seed Motion in Seed Feeding Device With DEM-CFDDocument11 pagesSimulation of Seed Motion in Seed Feeding Device With DEM-CFDNoureldin SharabyNo ratings yet
- Analysis of Ship MotionsDocument89 pagesAnalysis of Ship MotionsPrashant RajoraNo ratings yet
- Bohr ModelDocument11 pagesBohr ModelAntonio C. Keith100% (1)
- Sphere Penetration Into GelatinDocument8 pagesSphere Penetration Into GelatinRhonda BushNo ratings yet
- Sasa Test ProgramDocument13 pagesSasa Test ProgramSaša MarinNo ratings yet
- Cbse Class 11 Physics Sample Paper 2014 1Document4 pagesCbse Class 11 Physics Sample Paper 2014 1sagarchidre114No ratings yet
- Waves and Beaches: The Powerful Dynamics of Sea and CoastFrom EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastRating: 4 out of 5 stars4/5 (1)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AFrom EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANo ratings yet
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideFrom Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideRating: 3.5 out of 5 stars3.5/5 (7)
- The Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsFrom EverandThe Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsNo ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Advanced Computer-Aided Fixture DesignFrom EverandAdvanced Computer-Aided Fixture DesignRating: 5 out of 5 stars5/5 (1)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- 301 Top Tips for Design Engineers: To Help You 'Measure Up' in the World of EngineeringFrom Everand301 Top Tips for Design Engineers: To Help You 'Measure Up' in the World of EngineeringRating: 5 out of 5 stars5/5 (1)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansFrom EverandPractical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansRating: 4 out of 5 stars4/5 (8)