You might also like
- Earthquake isolation method with variable natural frequencyFrom EverandEarthquake isolation method with variable natural frequencyNo ratings yet
- Cavitation Erosion of The Damping Piston in Double Damping System of Hydraulic Rock Drill and Its Influencing FactorsDocument14 pagesCavitation Erosion of The Damping Piston in Double Damping System of Hydraulic Rock Drill and Its Influencing FactorsDavies EmmanuelNo ratings yet
- Research On The Performance of Hydraulic Vibratory Hammer With Coupled Dynamic ModelDocument12 pagesResearch On The Performance of Hydraulic Vibratory Hammer With Coupled Dynamic ModelCHARLIE LEUNGNo ratings yet
- Enhancement of Well Productivity by Means of Elastic WavesDocument13 pagesEnhancement of Well Productivity by Means of Elastic WavesSeyed Hadi AhmadiNo ratings yet
- Predictive Control of Seismic Structures LuDocument22 pagesPredictive Control of Seismic Structures LuDiegoHenaoLeonNo ratings yet
- Bernitsas M M.Problems in Marine R.Jan.1982.MT PDFDocument10 pagesBernitsas M M.Problems in Marine R.Jan.1982.MT PDFdanilo laraNo ratings yet
- A Prediction Method of WearDocument12 pagesA Prediction Method of WearEric AvilaNo ratings yet
- GROUP28Document23 pagesGROUP28Aditya ShekharNo ratings yet
- Seismic Response of Liquid Storage Tanks Isolated by Sliding BearingsDocument13 pagesSeismic Response of Liquid Storage Tanks Isolated by Sliding BearingsAdolfo Valenzuela BustosNo ratings yet
- Dynamic Research and Experimental Analys PDFDocument14 pagesDynamic Research and Experimental Analys PDFnajafiNo ratings yet
- In Uence of Vibration On The Performance of Tunnel Boring MachinesDocument7 pagesIn Uence of Vibration On The Performance of Tunnel Boring MachinesVesangi Lakshmi PrasadNo ratings yet
- Casing Failure Mechanism During Volume Fracturing A Case Study of A Shale Gas WellDocument9 pagesCasing Failure Mechanism During Volume Fracturing A Case Study of A Shale Gas WellLuciano FucelloNo ratings yet
- Article 6Document6 pagesArticle 6sami Tub ftNo ratings yet
- Irjet V5i5256 PDFDocument5 pagesIrjet V5i5256 PDFMuhsinaNo ratings yet
- Percussion Characteristic Analysis For Hydraulic Rock Drill With No Constant-Pressurized Chamber Through Numerical Simulation and ExperimentDocument11 pagesPercussion Characteristic Analysis For Hydraulic Rock Drill With No Constant-Pressurized Chamber Through Numerical Simulation and ExperimentDaniel OprutaNo ratings yet
- 2010-Fan C.C-Fluid Ind Inst Elim of Rot-B Sys With EM Exciter-Intl JMSDocument9 pages2010-Fan C.C-Fluid Ind Inst Elim of Rot-B Sys With EM Exciter-Intl JMSAlex CooperNo ratings yet
- Modeling of Pressure Uctuations in A Wellbore While Accelerated Axial Movement of The DrillstringDocument12 pagesModeling of Pressure Uctuations in A Wellbore While Accelerated Axial Movement of The DrillstringMejbahul SarkerNo ratings yet
- Modelo y Dinamismo de Una Turbina de BulboDocument21 pagesModelo y Dinamismo de Una Turbina de BulboJudith Ivett Cadena FernandezNo ratings yet
- (Original) Cui Et. Al., 2022Document8 pages(Original) Cui Et. Al., 2022Carolina CamposNo ratings yet
- Soil Dynamics and Earthquake Engineering: Beibei Yang, Mingming He, Zhiqiang Zhang, Jiwei Zhu, Yunsheng ChenDocument12 pagesSoil Dynamics and Earthquake Engineering: Beibei Yang, Mingming He, Zhiqiang Zhang, Jiwei Zhu, Yunsheng Chen김정현No ratings yet
- Solid Conveying in Vane Extruder For Polymer Processing: Effects On Pressure EstablishmentDocument10 pagesSolid Conveying in Vane Extruder For Polymer Processing: Effects On Pressure EstablishmentИгорь БезукладниковNo ratings yet
- Earthquake Safety Evaluation of Gravity DamsDocument12 pagesEarthquake Safety Evaluation of Gravity DamsNguyenNo ratings yet
- AbstractsDocument2 pagesAbstractsSilvia SlimeNo ratings yet
- DissertationDocument52 pagesDissertationHuy Nguyễn Ngọc QuangNo ratings yet
- Investigation of The Mechanical Response of A DeepDocument11 pagesInvestigation of The Mechanical Response of A DeepAmanda Isabela De CamposNo ratings yet
- Hydrodynamic Loads On A Hydraulic Turbine Wicket GateDocument10 pagesHydrodynamic Loads On A Hydraulic Turbine Wicket GateClaudio JuniorNo ratings yet
- Energy Dissipation Tribometer - 2022 - 1 s2.0 S0301679X22001219 MainDocument11 pagesEnergy Dissipation Tribometer - 2022 - 1 s2.0 S0301679X22001219 MainBittu Kumar SinghNo ratings yet
- Research Article: Wellbore Stability in Oil and Gas Drilling With Chemical-Mechanical CouplingDocument10 pagesResearch Article: Wellbore Stability in Oil and Gas Drilling With Chemical-Mechanical CouplingAhmed Nadhem AlshamsiNo ratings yet
- Research ArticleDocument7 pagesResearch ArticleChanna BandaraNo ratings yet
- Wcee2012 3020 PDFDocument10 pagesWcee2012 3020 PDFSATYAJIT PALNo ratings yet
- 08 SeismicDesignOfStructuresWithViscousDampers - DesbloqueadoDocument15 pages08 SeismicDesignOfStructuresWithViscousDampers - DesbloqueadoFrancisco Héctor BañuelosNo ratings yet
- Applsci 12 05827Document16 pagesApplsci 12 05827ATUL NAIRNo ratings yet
- Analysis of Water Hammer Forming On The Sheet MetalDocument6 pagesAnalysis of Water Hammer Forming On The Sheet MetalAlexander DeckerNo ratings yet
- Dynamic Characteristics of A Exible Bladed-Rotor With Coulomb Damping Dueto Tip-RubDocument45 pagesDynamic Characteristics of A Exible Bladed-Rotor With Coulomb Damping Dueto Tip-RubSandeep186No ratings yet
- Processes 11 02218Document22 pagesProcesses 11 02218Shang-Chieh TingNo ratings yet
- есть данные комбайнаDocument19 pagesесть данные комбайнаdimaNo ratings yet
- Wcee2012 2922 PDFDocument10 pagesWcee2012 2922 PDFponjoveNo ratings yet
- Unit Operation of MiningDocument29 pagesUnit Operation of MiningKevin Casanova MartínezNo ratings yet
- Liu 2014 IOP Conf. Ser. Earth Environ. Sci. 22 012017 PDFDocument11 pagesLiu 2014 IOP Conf. Ser. Earth Environ. Sci. 22 012017 PDFsabaris ksNo ratings yet
- Dynamic Brake Characteristics of Disc Brake During Emergency Braking of The Kilometer Deep Coal Mine HoistDocument23 pagesDynamic Brake Characteristics of Disc Brake During Emergency Braking of The Kilometer Deep Coal Mine HoistSoufiane AdianeNo ratings yet
- VIII Pump fabrication1-s2.0-S092442471000049X-mainDocument5 pagesVIII Pump fabrication1-s2.0-S092442471000049X-mainrajaram huptaNo ratings yet
- Propellant Fracturing RevisitedDocument12 pagesPropellant Fracturing RevisitedRamanamurthy PalliNo ratings yet
- Vibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationDocument16 pagesVibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationElvis CarneiroNo ratings yet
- Liner Hanger Journal TOPEJ-5-88Document9 pagesLiner Hanger Journal TOPEJ-5-88Josh SabimanNo ratings yet
- Dynamic Design Grinding MillsDocument11 pagesDynamic Design Grinding MillsBitbitterNo ratings yet
- Harsh Vardhan TLD Review PPR EditedDocument7 pagesHarsh Vardhan TLD Review PPR EditedHARSH VARDHAN SINGHNo ratings yet
- Comparative Study On Seismic Behavior of High-Rise Steel Building With and Without Friction Damper and Fluid Viscous Damper A ReviewDocument7 pagesComparative Study On Seismic Behavior of High-Rise Steel Building With and Without Friction Damper and Fluid Viscous Damper A ReviewIJRASETPublicationsNo ratings yet
- Article 6 PDFDocument9 pagesArticle 6 PDFALFRED NIXON (RA2112001020013)No ratings yet
- CFD Prediction of Flow Inside The Damper by The Use of LES ModelDocument8 pagesCFD Prediction of Flow Inside The Damper by The Use of LES Modelajd.nanthakumarNo ratings yet
- Paper PresentationDocument10 pagesPaper PresentationruchitaNo ratings yet
- Experimental and Numerical Investigations of Multiphase FlowsDocument3 pagesExperimental and Numerical Investigations of Multiphase Flowssumit sahNo ratings yet
- V Older 2007Document7 pagesV Older 2007bentalebNo ratings yet
- Design Calculation of Shock Absorber (Landcruiser) : AbstractDocument4 pagesDesign Calculation of Shock Absorber (Landcruiser) : AbstractDr. Aung Ko Latt50% (2)
- Lateral Vibration of Hydro Turbine-Generator Rotor With Varying Stiffness of Guide BearingsDocument15 pagesLateral Vibration of Hydro Turbine-Generator Rotor With Varying Stiffness of Guide BearingsstevebensonNo ratings yet
- Powder Technology: Y. Rama Murthy, K. Udaya BhaskarDocument12 pagesPowder Technology: Y. Rama Murthy, K. Udaya BhaskarAYDIN KOSENo ratings yet
- Experimental Study of Seismic Response of Buildings With Supplemental Fluid DampersDocument40 pagesExperimental Study of Seismic Response of Buildings With Supplemental Fluid DampersVladekNo ratings yet
- A New Approach For The Study of Silt Erosion of Hydro TurbineDocument4 pagesA New Approach For The Study of Silt Erosion of Hydro TurbinePashupati MandalNo ratings yet
- Optimization and Mechanism of The Wicket Gate ClosDocument17 pagesOptimization and Mechanism of The Wicket Gate ClosUros KaradzicNo ratings yet
- Investigation of The Influence of High Hydrostatic Pressure On The Abrasive Wear of Hard-Alloy MaterialsDocument2 pagesInvestigation of The Influence of High Hydrostatic Pressure On The Abrasive Wear of Hard-Alloy MaterialshemarajuNo ratings yet
- Document Weiler d460 Specsheet 32020Document2 pagesDocument Weiler d460 Specsheet 32020Davies EmmanuelNo ratings yet
- TX590SR AssemblyDocument2 pagesTX590SR AssemblyDavies EmmanuelNo ratings yet
- Hydraulic Breakers FENS00970 1902 115330Document12 pagesHydraulic Breakers FENS00970 1902 115330Davies EmmanuelNo ratings yet
- S250 Rockdrill: Parts & Service ManualDocument77 pagesS250 Rockdrill: Parts & Service ManualDavies EmmanuelNo ratings yet
- 2 class-INTRODUCTION TO MINING-3Document8 pages2 class-INTRODUCTION TO MINING-3Davies EmmanuelNo ratings yet
- Estimation of Impact Loads in A Hydraulic BreakerDocument15 pagesEstimation of Impact Loads in A Hydraulic BreakerDavies EmmanuelNo ratings yet
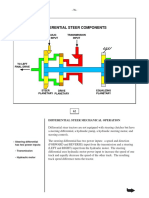
- Cat Dozer Differential SteeringDocument145 pagesCat Dozer Differential SteeringDavies Emmanuel100% (1)
- Operation & Maintenance ManualDocument162 pagesOperation & Maintenance ManualDavies EmmanuelNo ratings yet
- Computer and SensorsDocument30 pagesComputer and SensorsDavies EmmanuelNo ratings yet
- System Saver Series Single Cartridge Air Dryers: Maintenance Manual 34 Revised 11-02Document44 pagesSystem Saver Series Single Cartridge Air Dryers: Maintenance Manual 34 Revised 11-02Davies EmmanuelNo ratings yet
- Air Compressor Duraflo596Document40 pagesAir Compressor Duraflo596Davies EmmanuelNo ratings yet
- Bosch Pe Injection PumpDocument59 pagesBosch Pe Injection PumpDavies Emmanuel100% (1)
- Air Compressor Bendix Ba922Document32 pagesAir Compressor Bendix Ba922Davies EmmanuelNo ratings yet
- Bosch Injection Pump RebuildDocument21 pagesBosch Injection Pump RebuildDavies Emmanuel100% (1)
- Modern Control Systems 13Th Edition Dorf Solutions Manual Full Chapter PDFDocument46 pagesModern Control Systems 13Th Edition Dorf Solutions Manual Full Chapter PDFbonnie.karow455100% (10)
- ECT Classical MethodsDocument20 pagesECT Classical MethodsDhurba KarkiNo ratings yet
- Modern Methods For Random Fatigue of AutomotiveDocument13 pagesModern Methods For Random Fatigue of AutomotiveindaduqueNo ratings yet
- Response To General Dynamic LoadingDocument12 pagesResponse To General Dynamic LoadingFernanda LagoNo ratings yet
- Oscillatory Motion Lecture Physics For EnggDocument33 pagesOscillatory Motion Lecture Physics For EnggScredy GarciaNo ratings yet
- Q2W6 Damped OscillationDocument29 pagesQ2W6 Damped Oscillationhikkiro hikkiNo ratings yet
- Ebook Fundamentals of Structural Dynamics PDF Full Chapter PDFDocument67 pagesEbook Fundamentals of Structural Dynamics PDF Full Chapter PDFwilliam.layland712100% (25)
- ITP-Spacer Damper - Type Test PDFDocument4 pagesITP-Spacer Damper - Type Test PDFPrabhakar SvNo ratings yet
- Structural Dynamics Module 1 Assignment 1Document4 pagesStructural Dynamics Module 1 Assignment 1Arpit KumarNo ratings yet
- Addis Ababa Science & Technology University: College of Electrical & Mechanical EngineeringDocument91 pagesAddis Ababa Science & Technology University: College of Electrical & Mechanical Engineeringliyou eshetuNo ratings yet
- Manometer Lab ReportwithrefDocument12 pagesManometer Lab ReportwithrefCH20B020 SHUBHAM BAPU SHELKENo ratings yet
- Damped: Unit 3 Harmonic MotionDocument22 pagesDamped: Unit 3 Harmonic MotionDikshantNo ratings yet
- Development of A Dynamic Vibration Absorber To Reduce Frame BeamingDocument11 pagesDevelopment of A Dynamic Vibration Absorber To Reduce Frame Beaminggakada prbNo ratings yet
- Sound NotesDocument9 pagesSound Notes시야KpopMDNNo ratings yet
- Investigation Into Modelling and Control of A DC MotorDocument17 pagesInvestigation Into Modelling and Control of A DC MotorTamarakuro Simon AlaleNo ratings yet
- Dire Dawa University: Department of Civil EngineeringDocument3 pagesDire Dawa University: Department of Civil EngineeringDirsha Getach100% (1)
- MIE100H1 - 20195 - 631572298320MIE 100 CheatsheetDocument2 pagesMIE100H1 - 20195 - 631572298320MIE 100 CheatsheetSCR PpelusaNo ratings yet
- Earthquake Resistant StructuresDocument45 pagesEarthquake Resistant StructuresAnwesha BaruahNo ratings yet
- Problems 4 ChopDocument9 pagesProblems 4 ChopAnandlal RNo ratings yet
- Lecture 9 - 1 - MarkupDocument14 pagesLecture 9 - 1 - MarkupdeepNo ratings yet
- Lec 11Document9 pagesLec 11Government Polytechnic Gulzarbagh Patna 7No ratings yet
- Oscillations Class 11 Notes Physics Chapter 14 - Learn CBSEDocument8 pagesOscillations Class 11 Notes Physics Chapter 14 - Learn CBSERishabh Singh RajputNo ratings yet
- Time Response of 2nd Order SystemDocument4 pagesTime Response of 2nd Order SystemsNo ratings yet
- Oq-2017-Frictional Versus Kelvin-Voigt Damping in A Transmission ProblemDocument7 pagesOq-2017-Frictional Versus Kelvin-Voigt Damping in A Transmission ProblemAndré mashNo ratings yet
- Vibration ExampleDocument27 pagesVibration ExamplekosarNo ratings yet
- Final Project Report SalesDocument48 pagesFinal Project Report Salessaid mohamudNo ratings yet
- Design and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLABDocument9 pagesDesign and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLAB2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Chapter 2 Second-Order CircuitsDocument11 pagesChapter 2 Second-Order CircuitsCraig PeriNo ratings yet
- Logarithmic Decrement: Consider Eq.8A For Underdamped SystemDocument6 pagesLogarithmic Decrement: Consider Eq.8A For Underdamped SystemVjh GNo ratings yet
- Extracts ASCE 7 4chapter 18 Design of Damped StructuresDocument6 pagesExtracts ASCE 7 4chapter 18 Design of Damped Structuresrehan7421No ratings yet