You might also like
- Learning Objectives: Hydraulic MotorsDocument9 pagesLearning Objectives: Hydraulic MotorsdeepaksagarNo ratings yet
- MCE416 Moodle 5 Hydraulic MotorDocument20 pagesMCE416 Moodle 5 Hydraulic MotorPaul KonduNo ratings yet
- Lecture 10 NptelDocument9 pagesLecture 10 Nptelmailsk123No ratings yet
- 2.5 TMME 3104 Lecture 4Document10 pages2.5 TMME 3104 Lecture 4KALEMA BEMME2025No ratings yet
- 2 +Hydraulic+Actuators+-+BookDocument27 pages2 +Hydraulic+Actuators+-+BookmennatallahnoureldinNo ratings yet
- L7 - Hydraulic Motors and AccumulatorsDocument33 pagesL7 - Hydraulic Motors and Accumulatorsu1909030No ratings yet
- Actuators: Actuators My Notes and CalculationsDocument16 pagesActuators: Actuators My Notes and CalculationsMohamed RashedNo ratings yet
- Group 7 Hydraulic MotorDocument40 pagesGroup 7 Hydraulic MotorKapil KaviNo ratings yet
- System Drives and Actuators: Hydraulic, Pneumatic and Electrical Motors and ActuatorsDocument25 pagesSystem Drives and Actuators: Hydraulic, Pneumatic and Electrical Motors and ActuatorsSANTOSHNo ratings yet
- Hydrostatic and Electric DriveDocument25 pagesHydrostatic and Electric DriveJennsonFernandez50% (2)
- Universal Motor GuideDocument5 pagesUniversal Motor GuideSourav KumarNo ratings yet
- Luid Ower Ngineering: TopicDocument19 pagesLuid Ower Ngineering: TopicMD Mahmudul Hasan MasudNo ratings yet
- 074 Hydro Static TransmissionsDocument4 pages074 Hydro Static TransmissionsPrakash Chandrasekaran100% (1)
- Frequently Asked Questions: Lecture 10 and 11 Hydraulic MotorsDocument4 pagesFrequently Asked Questions: Lecture 10 and 11 Hydraulic MotorsjtorerocNo ratings yet
- Vishnu Chaudhary HydraulicsDocument17 pagesVishnu Chaudhary Hydraulicsvishnu chaudharyNo ratings yet
- Vishnu Chaudhary HydraulicsDocument17 pagesVishnu Chaudhary Hydraulicsvishnu chaudharyNo ratings yet
- Hydraulic Motors: What Is A Hydraulic Motor and Why Do You Need It?Document9 pagesHydraulic Motors: What Is A Hydraulic Motor and Why Do You Need It?samuelNo ratings yet
- Chapter 07Document31 pagesChapter 07AmmarYasirNo ratings yet
- Types of Ac GeneratorDocument10 pagesTypes of Ac GeneratorJherel BerinNo ratings yet
- Vane Motor PresentationDocument16 pagesVane Motor PresentationJayesh BholeNo ratings yet
- Application of Hydraulic Based Transmission SystemDocument6 pagesApplication of Hydraulic Based Transmission SystemKumardasNsNo ratings yet
- HYDRAULIC MOTORS: AN INTRODUCTION TO TYPES AND OPERATIONDocument19 pagesHYDRAULIC MOTORS: AN INTRODUCTION TO TYPES AND OPERATIONPyae Phyoe AungNo ratings yet
- Electrical Science-2: Term Paper of Ele102Document7 pagesElectrical Science-2: Term Paper of Ele102shailesh singhNo ratings yet
- Select the Right Hydraulic Motor for Your ApplicationDocument7 pagesSelect the Right Hydraulic Motor for Your ApplicationAnil NairNo ratings yet
- Water PumpDocument8 pagesWater Pumpjvinod2025No ratings yet
- A Universal Motor Is UniversalDocument6 pagesA Universal Motor Is UniversalrodinooNo ratings yet
- Select the Right Air Motor for Your ApplicationDocument14 pagesSelect the Right Air Motor for Your ApplicationRajeev ValunjkarNo ratings yet
- Ch. 6Document34 pagesCh. 6Lê Minh ĐứcNo ratings yet
- Different Types of Motor LoadDocument8 pagesDifferent Types of Motor Loadsanjay sharmaNo ratings yet
- Fluid Coupling &torque ConverterDocument5 pagesFluid Coupling &torque ConverterArsh Gautam UD100% (1)
- What Is A Compound DC MotorDocument8 pagesWhat Is A Compound DC MotorIan Rafael DeGuzman ReyesNo ratings yet
- Automatic TrasnmissionDocument57 pagesAutomatic Trasnmissionmohamed A.abdeltwabNo ratings yet
- Construction Details of Fluid CouplingDocument4 pagesConstruction Details of Fluid CouplingSagar Patil100% (1)
- Universal Motor A Simple Guide To Construction Types and WorkingDocument7 pagesUniversal Motor A Simple Guide To Construction Types and Workingmireyo1488No ratings yet
- A-Complete-Guide-to-Repulsion-Motor (Use For Repulsion Motor Article)Document5 pagesA-Complete-Guide-to-Repulsion-Motor (Use For Repulsion Motor Article)vishalNo ratings yet
- 译文 - 液力偶合器Hydraulic couplingDocument7 pages译文 - 液力偶合器Hydraulic couplingVocal SamirNo ratings yet
- Felices Plate 9 ResearchDocument3 pagesFelices Plate 9 ResearchCharls Ledcel FelicesNo ratings yet
- SSD 2 Marks With AnswersDocument35 pagesSSD 2 Marks With AnswersVijayakumarNo ratings yet
- Traction Motors: 1. Steam LocomotiveDocument5 pagesTraction Motors: 1. Steam LocomotiveRohit GahlodNo ratings yet
- Hydrostatic Transmission For Shunting LocomotivesDocument16 pagesHydrostatic Transmission For Shunting LocomotivesDIPAK VINAYAK SHIRBHATENo ratings yet
- Generator and Motor Loads, Speeds, and StartersDocument11 pagesGenerator and Motor Loads, Speeds, and StartersAlbany Smash100% (5)
- Electrical Drives:: Unit - I Drive CharacteristicsDocument22 pagesElectrical Drives:: Unit - I Drive CharacteristicsJegan8586100% (1)
- Automatic TransmissionDocument36 pagesAutomatic TransmissionIfeanyi IgwegbeNo ratings yet
- Motor AppplicationDocument17 pagesMotor Appplicationtajul tonoyNo ratings yet
- Automation and Robotics - MODULE 4 - Santhosh AcharyaDocument76 pagesAutomation and Robotics - MODULE 4 - Santhosh AcharyaMadhusudhan N MNo ratings yet
- Variable Speed TechnologyDocument10 pagesVariable Speed Technologyashumishra007No ratings yet
- 3.hydraulic Arm ProjecTDocument34 pages3.hydraulic Arm ProjecTManish Singh100% (1)
- Chapter ViDocument4 pagesChapter ViRinu SathyanNo ratings yet
- 2.4.hydraulic and Pneumatic ActuatorsDocument50 pages2.4.hydraulic and Pneumatic ActuatorsVitthal GawhaleNo ratings yet
- TM Unit 6Document5 pagesTM Unit 6eyobNo ratings yet
- Report PDFDocument14 pagesReport PDFNikhilVoodaNo ratings yet
- How a Universal Motor Works & is ControlledDocument3 pagesHow a Universal Motor Works & is ControlledJeremiah NayosanNo ratings yet
- Hydraulic TorquDocument2 pagesHydraulic Torqurajbir SinghNo ratings yet
- CLSSDocument74 pagesCLSSSurya Prakash100% (9)
- Torque, Speed and PowerDocument9 pagesTorque, Speed and PowerratheeshNo ratings yet
- Automatic Transmission ComponentsDocument12 pagesAutomatic Transmission ComponentsRizqy Fadry LazimNo ratings yet
- Exercise Solution of Chapter 3Document8 pagesExercise Solution of Chapter 3Engr ShabirNo ratings yet
- Pm-Clinic: Hydraulic Mining ExcavatorDocument34 pagesPm-Clinic: Hydraulic Mining ExcavatorGustavoSilvaNo ratings yet
- Diagnosing Toyota Tacoma Speed Sensors with Freeze Frame DataDocument6 pagesDiagnosing Toyota Tacoma Speed Sensors with Freeze Frame Datamarcelo ustarezNo ratings yet
- BPW Trailer Axle SKHSFALM 9010 VZ ECO Plus: Item Name BPW Code Number Dimension QuantityDocument14 pagesBPW Trailer Axle SKHSFALM 9010 VZ ECO Plus: Item Name BPW Code Number Dimension QuantityMartynas StonysNo ratings yet
- AC Oil Refrigerant Oil Quantities 2015-2016Document206 pagesAC Oil Refrigerant Oil Quantities 2015-2016EsmeraldaViIIalobosNo ratings yet
- 2RH™ Liner Setting ToolDocument14 pages2RH™ Liner Setting TooljosephbenettonNo ratings yet
- Removal: (Refer To 08 - Electrical/Electronic Control Modules/MODULE, Transmission Control - Standard Procedure)Document6 pagesRemoval: (Refer To 08 - Electrical/Electronic Control Modules/MODULE, Transmission Control - Standard Procedure)Curtis SavageNo ratings yet
- Caster ConceptsDocument83 pagesCaster Conceptssuperman3kNo ratings yet
- Technical Information: Recall ACE System Pipe LeakDocument9 pagesTechnical Information: Recall ACE System Pipe LeakturbojoNo ratings yet
- Mercedes-Benz Brochure ECitaro LHD en 2020-10-01 Screen Sp-1Document44 pagesMercedes-Benz Brochure ECitaro LHD en 2020-10-01 Screen Sp-1Sunny KooNo ratings yet
- PVK Pump Features SummaryDocument99 pagesPVK Pump Features SummarySebastiao DuarteNo ratings yet
- CSP0000535-01.FLS Recommended Spare Parts ListDocument9 pagesCSP0000535-01.FLS Recommended Spare Parts ListJames Oliver Jove HurtadoNo ratings yet
- FP - EN - 201706 Fristam PumpDocument40 pagesFP - EN - 201706 Fristam PumpFahmy FaishalNo ratings yet
- NOA004使用维修手册 (1-3.5T内燃英文) Operating and Service ManualDocument145 pagesNOA004使用维修手册 (1-3.5T内燃英文) Operating and Service ManualJose CamposNo ratings yet
- TLT - Electric Vehicle Grease - Sander - 05-19Document6 pagesTLT - Electric Vehicle Grease - Sander - 05-19gilar herliana putraNo ratings yet
- ZF P-7300 Manual de PartesDocument3 pagesZF P-7300 Manual de Parteshenotharenas50% (2)
- ZF - Ergopower 2 WG-94 ECDocument98 pagesZF - Ergopower 2 WG-94 ECsergio melgarejo100% (1)
- FFB - Custom - Settings - Pure Feel V5 (NEW)Document3 pagesFFB - Custom - Settings - Pure Feel V5 (NEW)JustinVoNo ratings yet
- Diagrama Eletrico FD36Document49 pagesDiagrama Eletrico FD36miqueiasNo ratings yet
- CO2 Technical Data Sheets - 2020 UL FM VDSDocument20 pagesCO2 Technical Data Sheets - 2020 UL FM VDSWendell de RidderNo ratings yet
- Wiring Schematic: Detroit Diesel Series 60 EnginesDocument1 pageWiring Schematic: Detroit Diesel Series 60 EnginesMario PattyNo ratings yet
- Cashflow Oktober NovemberDocument3 pagesCashflow Oktober Novemberrifqi azizNo ratings yet
- SuperTigre .18 Marine EngineDocument12 pagesSuperTigre .18 Marine EngineGodsniperNo ratings yet
- Question IARDocument4 pagesQuestion IARAryan jay vermaNo ratings yet
- 10.6 Schedule of Accreditation: Product Certification Body Accreditation No. APC0002Document16 pages10.6 Schedule of Accreditation: Product Certification Body Accreditation No. APC0002erwerwerwerwewNo ratings yet
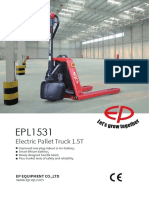
- EPL1531 (EN) BrochureDocument4 pagesEPL1531 (EN) BrochureBersanz SrlNo ratings yet
- TRC-6 Sonixs 1650x600 Manual 2018 Rev ADocument296 pagesTRC-6 Sonixs 1650x600 Manual 2018 Rev Agoretty cantonNo ratings yet
- Gdle 550 I Doosan LeegaDocument4 pagesGdle 550 I Doosan Leegaeugeniobaffi234No ratings yet
- Service Manual For Chery Tiggo (T11) Engine Section: Chapter 6 Cooling System Intake Manifold, Water PumpDocument3 pagesService Manual For Chery Tiggo (T11) Engine Section: Chapter 6 Cooling System Intake Manifold, Water PumpZouhair WahbiNo ratings yet
- Malabar: Read AND SaveDocument8 pagesMalabar: Read AND SavedairucNo ratings yet
- 55 100 Serie RIDocument80 pages55 100 Serie RIPauloGenetti100% (1)