You might also like
- Electronics Explained: Fundamentals for Engineers, Technicians, and MakersFrom EverandElectronics Explained: Fundamentals for Engineers, Technicians, and MakersRating: 5 out of 5 stars5/5 (5)
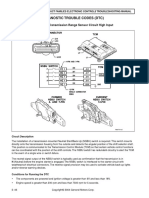
- Diagnostic Trouble Codes (DTC) : DTC P0708 Transmission Range Sensor Circuit High InputDocument4 pagesDiagnostic Trouble Codes (DTC) : DTC P0708 Transmission Range Sensor Circuit High Inputluis eduardo corzo enriquezNo ratings yet
- Manual de Pruebas O150853gDocument52 pagesManual de Pruebas O150853gRoberto MoctezumaNo ratings yet
- Online Mobile Repairing Course - Mobile Hardware and Software Repair Training PDFDocument9 pagesOnline Mobile Repairing Course - Mobile Hardware and Software Repair Training PDFmaulik shah100% (1)
- LCD TV RepairDocument44 pagesLCD TV Repairbrotherg100% (11)
- Use of The Oscilloscope-UMDDocument25 pagesUse of The Oscilloscope-UMDAngela Majaba0% (1)
- Arduino Earthquake AlarmDocument16 pagesArduino Earthquake AlarmJohn KwonNo ratings yet
- IR ADV C7055 Series (SM)Document1,821 pagesIR ADV C7055 Series (SM)Model MNo ratings yet
- Audio Amplifier Power SupplyDocument14 pagesAudio Amplifier Power SupplyklauskrugerNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Sa Akx92 PDFDocument157 pagesSa Akx92 PDFfjeroNo ratings yet
- Zhang 2016Document8 pagesZhang 2016Roberto GutierrezNo ratings yet
- Experiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyDocument12 pagesExperiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyMukul ChandraNo ratings yet
- User'S Manual: BM867s BM869sDocument24 pagesUser'S Manual: BM867s BM869sBranislav TasicNo ratings yet
- Development of Ultrasonic Small Flow Measuring (STC89C52)Document4 pagesDevelopment of Ultrasonic Small Flow Measuring (STC89C52)Zafer OnanNo ratings yet
- PM540WCDocument6 pagesPM540WCMiron ShikulaNo ratings yet
- Sbox: Abstract - This Report Shows The Methodology To Develop A CrackDocument2 pagesSbox: Abstract - This Report Shows The Methodology To Develop A CrackJose PucNo ratings yet
- Slyt 209 ADocument6 pagesSlyt 209 AGopinath ReddyNo ratings yet
- Design and Implementation of Precise Hardware For Electrical Impedance Tomography (Eit)Document20 pagesDesign and Implementation of Precise Hardware For Electrical Impedance Tomography (Eit)laalai wafaNo ratings yet
- Unit 1 Praktikum QNET MECHKITDocument17 pagesUnit 1 Praktikum QNET MECHKITMadania AsshagabNo ratings yet
- Touch Screen TechnologyDocument17 pagesTouch Screen TechnologymaddagaduNo ratings yet
- Unit 3 Class NotesDocument19 pagesUnit 3 Class NotesAjay SriramNo ratings yet
- Exp 2 Study of Different Electronics InstrumentsDocument9 pagesExp 2 Study of Different Electronics Instrumentsabhinav tuplondheNo ratings yet
- Lab Handout 10Document5 pagesLab Handout 10SahabNo ratings yet
- Design of A Force/Tactile Sensor For Robotic Grippers: ProceedingsDocument4 pagesDesign of A Force/Tactile Sensor For Robotic Grippers: Proceedingsmafia criminalNo ratings yet
- Chapter One InstruDocument17 pagesChapter One Instrubahiru meleseNo ratings yet
- Solid State Devices and Circuits (EET-201) : Practical Lab FileDocument10 pagesSolid State Devices and Circuits (EET-201) : Practical Lab FileRajarshi TiwariNo ratings yet
- 6 II February 2018Document6 pages6 II February 2018oyukiisaacNo ratings yet
- Electricity Consumption Measurement SystDocument4 pagesElectricity Consumption Measurement SystPabel QuispeNo ratings yet
- Touchscreen ReportDocument19 pagesTouchscreen ReportmontyNo ratings yet
- Name Abhishek Ranjan R.NO. - RE3004 B58 REG - NO.-11001020Document26 pagesName Abhishek Ranjan R.NO. - RE3004 B58 REG - NO.-11001020Abhishek RanjanNo ratings yet
- Energy Efficient Smart Home Automation System: Abhay Kumar, Neha TiwariDocument3 pagesEnergy Efficient Smart Home Automation System: Abhay Kumar, Neha TiwarisaiNo ratings yet
- Operations and Maintenance Manual Ams4A048 Touch Screen Winch Operators PanelDocument60 pagesOperations and Maintenance Manual Ams4A048 Touch Screen Winch Operators PanelAyman MaezaNo ratings yet
- Pasquale Arpaia, Pasquale Cimmino, Fabrizio Clemente, Carmine RomanucciDocument5 pagesPasquale Arpaia, Pasquale Cimmino, Fabrizio Clemente, Carmine Romanuccinaveen reddyNo ratings yet
- Final Project For Micro ButenDocument15 pagesFinal Project For Micro ButenJohn Errol MergalNo ratings yet
- Smart Liquid Level Controller Using Arduino With SMS AlertDocument4 pagesSmart Liquid Level Controller Using Arduino With SMS AlertInternational Journal of Innovations in Engineering and Science0% (1)
- Hybrid Multimeter (HMM) - Cost-Efficient Measuring InstrumentDocument5 pagesHybrid Multimeter (HMM) - Cost-Efficient Measuring InstrumentLin DanNo ratings yet
- Experiment 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyDocument7 pagesExperiment 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power Supplypappuyadav1996No ratings yet
- Touch Screen TechnologyDocument13 pagesTouch Screen TechnologySankeerthana LikhithaNo ratings yet
- Analysis of Cmos Second Generation Current Conveyors IJERTV3IS20947Document4 pagesAnalysis of Cmos Second Generation Current Conveyors IJERTV3IS20947IMRAN AHMADNo ratings yet
- IEEE 1850 GroundGridCalcsDocument11 pagesIEEE 1850 GroundGridCalcsaabts1413No ratings yet
- Department of Electrical Engineering: Instrumentation Lab EEDocument3 pagesDepartment of Electrical Engineering: Instrumentation Lab EEMayur GuptaNo ratings yet
- WSN FileDocument9 pagesWSN FileleezaNo ratings yet
- Microscopic View of Flank Wear AreaDocument4 pagesMicroscopic View of Flank Wear Areajacobian1810No ratings yet
- An Arduino-Based System For Monitoring and Protecting Overvoltage and UndervoltageDocument6 pagesAn Arduino-Based System For Monitoring and Protecting Overvoltage and UndervoltageJontelli SimonNo ratings yet
- Robotics Unit-3 2-MarksDocument17 pagesRobotics Unit-3 2-Marksveerapandian100% (1)
- Design and Implementation of Precise Hardware For Electrical Impedance Tomography (Eit)Document20 pagesDesign and Implementation of Precise Hardware For Electrical Impedance Tomography (Eit)Laalai LaalaiNo ratings yet
- P7-Design of A Real-Time PC Based Automatic Pressure Controller and An Optical PressureDocument4 pagesP7-Design of A Real-Time PC Based Automatic Pressure Controller and An Optical PressureGregorius KevinNo ratings yet
- Improvement of Optical Fiber Communication System Using A Parallel Interface CircuitDocument6 pagesImprovement of Optical Fiber Communication System Using A Parallel Interface CircuitHimanshu PalNo ratings yet
- C. Damian, C. Zet, I. Enculescu, R. Spohr: Virtual PotentiostatDocument5 pagesC. Damian, C. Zet, I. Enculescu, R. Spohr: Virtual Potentiostatnajam696No ratings yet
- Experiment 2 Measurement of Voltage and Frequency Using A CRO.Document12 pagesExperiment 2 Measurement of Voltage and Frequency Using A CRO.Tushar Sharma100% (1)
- ESC 201A ExpDocument9 pagesESC 201A Expanshikamittal2626No ratings yet
- Inductive Current Transformer Core Parameters Behaviour vs. Temperature Under Different Working ConditionsDocument6 pagesInductive Current Transformer Core Parameters Behaviour vs. Temperature Under Different Working ConditionsdvaidNo ratings yet
- Touch Screen TechnologyDocument26 pagesTouch Screen TechnologykillertunuNo ratings yet
- Instrumentation: Figure 3: A Display Showing How Measurements Have Changed Over TimeDocument3 pagesInstrumentation: Figure 3: A Display Showing How Measurements Have Changed Over TimegregNo ratings yet
- UniSCAN NX - H - V - PrinterDocument7 pagesUniSCAN NX - H - V - PrinterYogesh RamdasiNo ratings yet
- Design and Implementation of Elevator Control System by Arduino MicrocontrollerDocument5 pagesDesign and Implementation of Elevator Control System by Arduino MicrocontrollerUmer EhsanNo ratings yet
- Arduino Based Wireless Robotic Hand Using ZigbeeDocument8 pagesArduino Based Wireless Robotic Hand Using Zigbeeshaik nayeemNo ratings yet
- Instrukcja - en BM233 2016-05-06 1Document24 pagesInstrukcja - en BM233 2016-05-06 1Szigyarto MihaiNo ratings yet
- Sensors and Control Interface Methods Based On TriDocument13 pagesSensors and Control Interface Methods Based On TriPiyush Kumar SahooNo ratings yet
- Soil Moisture Control Using RF Transreceiver: I J A R E E I EDocument5 pagesSoil Moisture Control Using RF Transreceiver: I J A R E E I EWantamail 1No ratings yet
- FT-Delta en DatasheetDocument10 pagesFT-Delta en DatasheetMariusz PawluczukNo ratings yet
- Potentiometric Error DectectorDocument20 pagesPotentiometric Error DectectorBalraj SinghNo ratings yet
- Multichannel Data Acquisition SystemDocument11 pagesMultichannel Data Acquisition SystemIJRASETPublicationsNo ratings yet
- Ijircce PaperDocument5 pagesIjircce PaperNagachandraNo ratings yet
- Mechatronics NotesDocument131 pagesMechatronics NotesNagarajNo ratings yet
- Design and Implementation of Portable Impedance AnalyzersFrom EverandDesign and Implementation of Portable Impedance AnalyzersNo ratings yet
- Umted States Patent (10) Patent N0.: US 10,353,506 B2Document30 pagesUmted States Patent (10) Patent N0.: US 10,353,506 B2Oscar Alejandro Cruz ArguelloNo ratings yet
- United States Patent: Vosgueritchian Et AlDocument22 pagesUnited States Patent: Vosgueritchian Et AlOscar Alejandro Cruz ArguelloNo ratings yet
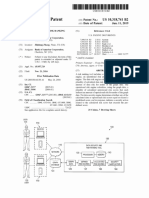
- United States Patent: (45) Date of Patent: Jan - 23, 2018Document16 pagesUnited States Patent: (45) Date of Patent: Jan - 23, 2018Oscar Alejandro Cruz ArguelloNo ratings yet
- United States Patent: Goto Et AlDocument31 pagesUnited States Patent: Goto Et AlOscar Alejandro Cruz ArguelloNo ratings yet
- Patent Application Publication (10) Pub - No .: US 2021/0203684 A1Document19 pagesPatent Application Publication (10) Pub - No .: US 2021/0203684 A1Oscar Alejandro Cruz ArguelloNo ratings yet
- Patent Application Publication (10) Pub - No .: US 2021/0092154 A1Document24 pagesPatent Application Publication (10) Pub - No .: US 2021/0092154 A1Oscar Alejandro Cruz ArguelloNo ratings yet
- Uses Attack Type Lusesattack Type - SendeDocument25 pagesUses Attack Type Lusesattack Type - SendeOscar Alejandro Cruz ArguelloNo ratings yet
- United States Patent: (10) Patent No .: US 10, 318, 741 B2Document16 pagesUnited States Patent: (10) Patent No .: US 10, 318, 741 B2Oscar Alejandro Cruz ArguelloNo ratings yet
- United States Patent: Anantharaju Et AlDocument21 pagesUnited States Patent: Anantharaju Et AlOscar Alejandro Cruz ArguelloNo ratings yet
- ECN3021Document10 pagesECN3021Wasang Juwi PracihnoNo ratings yet
- Project Report-Seismic SensorDocument4 pagesProject Report-Seismic Sensorshantanukotkar91100% (1)
- Transformers and Logic GatesDocument4 pagesTransformers and Logic GatesCåłłmėĎäddyNo ratings yet
- Monostable MultivibratorDocument4 pagesMonostable MultivibratorSakshi GosaviNo ratings yet
- Ss 01105Document6 pagesSs 01105Didit AndiatmokoNo ratings yet
- Datasheet lm3914Document29 pagesDatasheet lm3914antonioNo ratings yet
- Chapter 3 Diode Circuits and ApplicationsDocument3 pagesChapter 3 Diode Circuits and ApplicationsBRIGHT TZZZY CHINGWENANo ratings yet
- The NOT GateDocument20 pagesThe NOT GateAnonymous eWMnRr70qNo ratings yet
- MaxAmp 11/45 Manual and SchematicDocument23 pagesMaxAmp 11/45 Manual and Schematicoldradioguy2100% (1)
- Add Diode-Clipping Distortion To Your Guitar Amp - 6 Steps (With Pictures) PDFDocument17 pagesAdd Diode-Clipping Distortion To Your Guitar Amp - 6 Steps (With Pictures) PDFIñaki ToneMonsterNo ratings yet
- Panjab University Chandigarh-160 014 (India) : Faculty of ScienceDocument42 pagesPanjab University Chandigarh-160 014 (India) : Faculty of ScienceCOSM-OSNo ratings yet
- Shenzhen LED Color Opto Electronic Co.,ltd: SK6812MINIDocument12 pagesShenzhen LED Color Opto Electronic Co.,ltd: SK6812MINIhnguyen913No ratings yet
- Dac 0800 & Dac 0802 (An 1525)Document4 pagesDac 0800 & Dac 0802 (An 1525)HARICH90No ratings yet
- (Mtech Ece) - 2012Document70 pages(Mtech Ece) - 2012Kumar VaibhavNo ratings yet
- Company: Vishay Intertechnology, IncDocument6 pagesCompany: Vishay Intertechnology, IncPragati ChaudharyNo ratings yet
- Ifa LM 1823 An-391Document16 pagesIfa LM 1823 An-391Titis PrasetyoNo ratings yet
- ICLogicDocument12 pagesICLogicJoemry AlcantaraNo ratings yet
- Small-Signal Transistor Amplifiers PDFDocument14 pagesSmall-Signal Transistor Amplifiers PDFManoj Singh RawatNo ratings yet
- Emergency Stop Examples Sistema Ver 100Document16 pagesEmergency Stop Examples Sistema Ver 100Wer AdNo ratings yet
- Sony Dsc-w630 Ver1.1 Level2Document25 pagesSony Dsc-w630 Ver1.1 Level2Alberto MorenoNo ratings yet
- ADE U1 Feedback Amplifier & OscillatorDocument28 pagesADE U1 Feedback Amplifier & OscillatorADEPU GAUTHAM (RA2111026010190)No ratings yet
- 7SR10 ArgusCompleteTechnicalManualDocument314 pages7SR10 ArgusCompleteTechnicalManualLuis Felipe Diniz RibeiroNo ratings yet