You might also like
- EEC 129 Theory - PDF - Cable - Insulator (Electricity)Document34 pagesEEC 129 Theory - PDF - Cable - Insulator (Electricity)Abel LazarusNo ratings yet
- EEC232 Circuit Theory1 EXAMDocument3 pagesEEC232 Circuit Theory1 EXAMChibueze EzeokaforNo ratings yet
- Electronics IIIDocument9 pagesElectronics IIIsaadiaNo ratings yet
- EEC236 - Lecture 3-Three Phase TransformersDocument14 pagesEEC236 - Lecture 3-Three Phase TransformersLord bismarkNo ratings yet
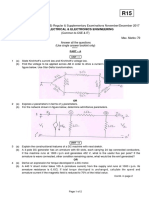
- 15A99301 Basic Electrical and Electronics Engineering - 1 PDFDocument2 pages15A99301 Basic Electrical and Electronics Engineering - 1 PDFMadhuSudanNo ratings yet
- Exam 4 Solutions PDFDocument5 pagesExam 4 Solutions PDFdannyNo ratings yet
- Solar-Powered Battery Charging With Highly Efficient Buck ConverterDocument20 pagesSolar-Powered Battery Charging With Highly Efficient Buck ConverterSusanNo ratings yet
- 13A99101 Basic Electrical & Electronics EngineeringDocument2 pages13A99101 Basic Electrical & Electronics Engineeringjagadeesh0% (1)
- 9a02304-Basic Electrical & Electronics EngineeringDocument4 pages9a02304-Basic Electrical & Electronics Engineeringsivabharathamurthy0% (1)
- 15A99301 Basic Electrical and Electronics Engineering - 3 PDFDocument2 pages15A99301 Basic Electrical and Electronics Engineering - 3 PDFMadhuSudanNo ratings yet
- Basic Electronics 2Document66 pagesBasic Electronics 2Sandhya DeviNo ratings yet
- New Scheme Based On AICTE Flexible CurriculaDocument2 pagesNew Scheme Based On AICTE Flexible CurriculaNishant Gupta100% (1)
- Electrical Engineering: Electric CircuitsDocument14 pagesElectrical Engineering: Electric CircuitsAmit Prakash SahooNo ratings yet
- 9A02502 Transmission of Electric PowerDocument6 pages9A02502 Transmission of Electric PowersivabharathamurthyNo ratings yet
- EL 404 Circuit & Field TheoryDocument57 pagesEL 404 Circuit & Field Theorykaruppusamymari100% (1)
- UNIT I NotesDocument34 pagesUNIT I NotesKarthikeyan VNo ratings yet
- Advanced Electric Machine TheoryDocument7 pagesAdvanced Electric Machine TheoryAzemi YakubNo ratings yet
- ICL8038 Linear Sweep Function Generator CCTDocument2 pagesICL8038 Linear Sweep Function Generator CCTian_new100% (1)
- The Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsDocument3 pagesThe Copperbelt University School of Mathematics and Natural Sciences Department of Physics PH 110 Introductory PhysicsLazy BanditNo ratings yet
- 15A99301 Basic Electrical and Electronics EngineeringDocument1 page15A99301 Basic Electrical and Electronics EngineeringjagadeeshNo ratings yet
- DC Shunt MotorDocument14 pagesDC Shunt MotorJohn kamandaNo ratings yet
- Eec 236Document64 pagesEec 236Luise ShadrachNo ratings yet
- Lab 4 - Clippper and Clamper CircuitsDocument7 pagesLab 4 - Clippper and Clamper CircuitseyobNo ratings yet
- Infineon TC1766 DS v01 00 enDocument117 pagesInfineon TC1766 DS v01 00 enFiliberto Conde MayoNo ratings yet
- Detection and Estimation of Signals in NoiseDocument309 pagesDetection and Estimation of Signals in NoiseSupermanNo ratings yet
- Design and Implementation of A Solar Charge Controller With Variable OutputDocument12 pagesDesign and Implementation of A Solar Charge Controller With Variable OutputManish kumar100% (1)
- 12 Solar Water Heater GeyserDocument33 pages12 Solar Water Heater Geysershaurya sharmaNo ratings yet
- T790 - Industrial Electronics N5 QP Apr 2019Document11 pagesT790 - Industrial Electronics N5 QP Apr 2019Kelsey BothaNo ratings yet
- .NG EEC115 Electrical Engineering Science 1Document29 pages.NG EEC115 Electrical Engineering Science 1archibong dominicNo ratings yet
- 15A99301 Basic Electrical and Electronics Engineering - 4 PDFDocument2 pages15A99301 Basic Electrical and Electronics Engineering - 4 PDFMadhuSudanNo ratings yet
- Eec 125Document74 pagesEec 125NUSIRAT IGENo ratings yet
- Automatic Door Bell With Object DetectioinDocument10 pagesAutomatic Door Bell With Object Detectioinkaarthik K100% (1)
- A Novel ZVS-ZCS Bi-Directional Flyback DC-DCDocument6 pagesA Novel ZVS-ZCS Bi-Directional Flyback DC-DCArceu CamposNo ratings yet
- Electrical TechnologyDocument200 pagesElectrical Technologymjaji khulehNo ratings yet
- EEC 126 Discussion 4 SolutionsDocument4 pagesEEC 126 Discussion 4 SolutionsHoward100% (1)
- Electrodynamometer Type WattmeterDocument3 pagesElectrodynamometer Type WattmeternpavankNo ratings yet
- EEC245 Electrical Installation of BuildingDocument1 pageEEC245 Electrical Installation of BuildingSHAMSUDEEN muhammedNo ratings yet
- Signal Processing Techniques For Software Radio: Behrouz Farhang-BoroujenyDocument7 pagesSignal Processing Techniques For Software Radio: Behrouz Farhang-BoroujenyAnkit AgarwalNo ratings yet
- Question Bank-Ae 304Document2 pagesQuestion Bank-Ae 304resham k vNo ratings yet
- ADC BasicsDocument12 pagesADC Basicsapi-26100966No ratings yet
- Machine Over Heat Protection and DetectiDocument48 pagesMachine Over Heat Protection and DetectiNamakabaNo ratings yet
- OC & SC Test On 1-Phase TransformerDocument5 pagesOC & SC Test On 1-Phase TransformerChaitanyavaddigalaNo ratings yet
- BE Unit 1 KKnotesDocument45 pagesBE Unit 1 KKnotesJahannavi Singh0% (1)
- EE113 Course Notes Electronic CircuitsDocument268 pagesEE113 Course Notes Electronic Circuitspowerdeadlifter100% (1)
- 002MCQDocument15 pages002MCQAhmed FarahatNo ratings yet
- Design and Implementation of Wireless Energy Meter System For Monitoring The Single Phase SupplyDocument4 pagesDesign and Implementation of Wireless Energy Meter System For Monitoring The Single Phase SupplyReeta DuttaNo ratings yet
- Phoibos-1.2 Manual PDFDocument58 pagesPhoibos-1.2 Manual PDFDaniel DiaNo ratings yet
- Villa Endograph DC (Service Manual)Document106 pagesVilla Endograph DC (Service Manual)ALEXANDER JEAN BEDIA CONDORINo ratings yet
- Lab ManualDocument101 pagesLab ManualJayNo ratings yet
- Lab Manual 20484Document83 pagesLab Manual 20484Syamil Amir Hamzah0% (1)
- POTENCIOSTATO Manual EC-Lab Software Techniques and ApplicationsDocument269 pagesPOTENCIOSTATO Manual EC-Lab Software Techniques and Applicationssalomonsan.rcNo ratings yet
- Electrical TheoryDocument154 pagesElectrical Theorypatriot4229100% (2)
- 3 Substation Earthing Guide EG1 DRAFT1Document174 pages3 Substation Earthing Guide EG1 DRAFT1dipenkhandhediya100% (2)
- Mercury (User's Manual) PDFDocument95 pagesMercury (User's Manual) PDFManuel Vivero DiéguezNo ratings yet
- Dental Duray (Service Manual)Document104 pagesDental Duray (Service Manual)Eduardo Saul MendozaNo ratings yet
- First Year Handout March 2021Document112 pagesFirst Year Handout March 2021King MegaNo ratings yet
- QL OEM Guide Febr 01Document28 pagesQL OEM Guide Febr 01lizbethNo ratings yet
- 460 Elec BK 1Document63 pages460 Elec BK 1Ramiro Joel Quiñonez RamosNo ratings yet
- Full TextDocument197 pagesFull Textbikash sahuNo ratings yet
- BS en 61606-1 2009Document34 pagesBS en 61606-1 2009Modern DesignsNo ratings yet
- MSE Mono 60 - v3 (270-280)Document2 pagesMSE Mono 60 - v3 (270-280)amitNo ratings yet
- Lab-2 (Tutorial) Simulation of Lna (Cadence Spectrerf) : Prepared by Rashad.M.Ramzan Rashad@Isy - Liu.SeDocument18 pagesLab-2 (Tutorial) Simulation of Lna (Cadence Spectrerf) : Prepared by Rashad.M.Ramzan Rashad@Isy - Liu.Seblue-smart1355100% (1)
- Straight Through CableDocument23 pagesStraight Through CableHonorato MalabadNo ratings yet
- WavePro LT. Busway SystemDocument44 pagesWavePro LT. Busway SystemnaveedfndNo ratings yet
- EC6401 Electronics Circuits II - Notes - AnnaunivupdatesDocument96 pagesEC6401 Electronics Circuits II - Notes - Annaunivupdatesmanimangai100% (2)
- Upgrade Electrical Systems at Abqaiq Plants: Plan Elevation and General Arrangement Drawing For 111-091-MCC-003Document6 pagesUpgrade Electrical Systems at Abqaiq Plants: Plan Elevation and General Arrangement Drawing For 111-091-MCC-003Asad MaherNo ratings yet
- Unit 4Document8 pagesUnit 4Sri ChandanaNo ratings yet
- Paper DFR - Guide Transformadores PDFDocument6 pagesPaper DFR - Guide Transformadores PDFricsaguiNo ratings yet
- Control Techniques For Power Factor CorrectionDocument9 pagesControl Techniques For Power Factor Correctionsatya_9145No ratings yet
- Eaton E Series DX 20kVADocument58 pagesEaton E Series DX 20kVAhighwtonNo ratings yet
- 980h CatDocument4 pages980h CatFreddy Villegas100% (4)
- Submittal For Al Barsha 363 Rev0 PDFDocument54 pagesSubmittal For Al Barsha 363 Rev0 PDFGokulNo ratings yet
- Floodlight FLM9Document1 pageFloodlight FLM9EliasNo ratings yet
- Module No: 05 Interfacing 8051 To LCD: Course Coordinator:Prof - Mahesh P.YanagimathDocument32 pagesModule No: 05 Interfacing 8051 To LCD: Course Coordinator:Prof - Mahesh P.YanagimathUday shankar B LNo ratings yet
- 7SR17 Rho Catalogue Sheet PDFDocument20 pages7SR17 Rho Catalogue Sheet PDFMichael Roche0% (1)
- Detection and Classification of Defects in Ceramic Insulators Using RF Antenna PDFDocument8 pagesDetection and Classification of Defects in Ceramic Insulators Using RF Antenna PDFRodick GansfordNo ratings yet
- Low Power Pulse Width Modulator: Description FeaturesDocument12 pagesLow Power Pulse Width Modulator: Description FeaturespatrykNo ratings yet
- Catalog - Loox (Iluminare Mobilier)Document68 pagesCatalog - Loox (Iluminare Mobilier)Paul AndreiNo ratings yet
- 6FM75TD-X: Battery ConstructionDocument2 pages6FM75TD-X: Battery ConstructionCristian Felipe Rangel TrianaNo ratings yet
- Review of Reactive Power Compensation TechnologiesDocument79 pagesReview of Reactive Power Compensation TechnologiesRadu BabauNo ratings yet
- Diesel Plant Sizing and Performance Analysis of A Remote Wind-Diesel MicrogridDocument8 pagesDiesel Plant Sizing and Performance Analysis of A Remote Wind-Diesel MicrogridshadyNo ratings yet
- HEA Igniter CatalogueDocument4 pagesHEA Igniter Cataloguemohan babuNo ratings yet
- Industrial Asd 75 132kw Operating InstructionDocument4 pagesIndustrial Asd 75 132kw Operating InstructionRinda_RaynaNo ratings yet
- 48 Oled 93512Document175 pages48 Oled 93512roni.baloni.007No ratings yet
- GPM32F011XBV10 Sensorless SMO Control of PMSM Using GPM32F011xB User (English Version)Document19 pagesGPM32F011XBV10 Sensorless SMO Control of PMSM Using GPM32F011xB User (English Version)ISHAK CHERGUINo ratings yet
- Led TV : Owner'S ManualDocument82 pagesLed TV : Owner'S ManualRaul AlfaroNo ratings yet
- Rz1 ManualDocument34 pagesRz1 Manualhaha2012No ratings yet
- Norton Rohde LankfordDocument2 pagesNorton Rohde LankfordJ PelrickNo ratings yet
- Simple Slave Flash Trigger CircuitDocument6 pagesSimple Slave Flash Trigger Circuitjeffreygovender5745No ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Recent Advances in Electrical Engineering: Applications OrientedFrom EverandRecent Advances in Electrical Engineering: Applications OrientedNo ratings yet
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)