You might also like
- Swedish Electricity MarketDocument32 pagesSwedish Electricity MarketCarloNo ratings yet
- World Record HVDC Submarine Cables-MMADocument2 pagesWorld Record HVDC Submarine Cables-MMAmartinpellsNo ratings yet
- A Large Wind Power System in Almost Island Operation-A Danish Case StudyDocument7 pagesA Large Wind Power System in Almost Island Operation-A Danish Case StudyNaveenNavabNo ratings yet
- Submarine CableDocument5 pagesSubmarine CableIqbal BudisaputroNo ratings yet
- PSSE Offshore Wind HVDCDocument174 pagesPSSE Offshore Wind HVDCmohamed berririNo ratings yet
- Masteroppgave1 tcm10-2243Document188 pagesMasteroppgave1 tcm10-2243adepomaNo ratings yet
- 08048605Document11 pages08048605rascalangelNo ratings yet
- Wave Power Performance of Wave Energy Converters at High-Energy Areas of A Semi-Enclosed SeaDocument14 pagesWave Power Performance of Wave Energy Converters at High-Energy Areas of A Semi-Enclosed SeaAjabgul MajidiNo ratings yet
- Smart Grid AssignmentDocument16 pagesSmart Grid Assignmentabstudio0049No ratings yet
- Briefing Paper: Ocean Grids Around EuropeDocument15 pagesBriefing Paper: Ocean Grids Around Europejbalbas6307No ratings yet
- Transient Stability Assessment of Power System With Large Amount of Wind Power Penetration The Danish Case StudyDocument8 pagesTransient Stability Assessment of Power System With Large Amount of Wind Power Penetration The Danish Case Studyrasim_m1146No ratings yet
- D5.1.55 - Dynamic Line RatingDocument62 pagesD5.1.55 - Dynamic Line Ratingadriasiq3068No ratings yet
- Transmission Design and Analysis For Large-Scale Offshore Wind Energy DevelopmentDocument10 pagesTransmission Design and Analysis For Large-Scale Offshore Wind Energy DevelopmentFilho EngenheiroNo ratings yet
- TFM - Offshore WF Layouts - Performance Comparison For A 540 MW OFS WF PDFDocument239 pagesTFM - Offshore WF Layouts - Performance Comparison For A 540 MW OFS WF PDFSergio Valentin100% (1)
- HVDC Transmission en Corriente ContinuaDocument46 pagesHVDC Transmission en Corriente ContinuaWilber William Moscoso ZamudioNo ratings yet
- 2172 DenmarkDocument7 pages2172 DenmarkLong LeoNo ratings yet
- Possible Test Case of HVDCDocument7 pagesPossible Test Case of HVDCKarthik KannanNo ratings yet
- Under Grounding The Electricity NetworksDocument49 pagesUnder Grounding The Electricity Networksdetroit44No ratings yet
- Failure Rates of Offshore Wind Transmission SystemDocument12 pagesFailure Rates of Offshore Wind Transmission SystemNam DHNo ratings yet
- Radial Water Barrier in Submarine Cables, Current SolutionsDocument20 pagesRadial Water Barrier in Submarine Cables, Current SolutionsTrầnHữuHòaNo ratings yet
- Tykeson Nyman Orig Enviromental and Geographical AspesctsDocument7 pagesTykeson Nyman Orig Enviromental and Geographical AspesctsAlireza AzerilaNo ratings yet
- Optimisation of Power Cable Ampacity in Offshore WDocument10 pagesOptimisation of Power Cable Ampacity in Offshore Wahmed fikryNo ratings yet
- Paper 223-UKACC Final V3a PDFDocument8 pagesPaper 223-UKACC Final V3a PDFfuncionbinomial4No ratings yet
- Smart Superconducting GridDocument8 pagesSmart Superconducting GridPaolo TanasiNo ratings yet
- Interconnection of The Cycladic Islands To The Mainland GridDocument8 pagesInterconnection of The Cycladic Islands To The Mainland GridAchmad Nashihuddin AkmalNo ratings yet
- HVDC Transmission Techno-Economic AnalysisDocument6 pagesHVDC Transmission Techno-Economic AnalysisElhindi hatimNo ratings yet
- Electric Vehicles Charging in A Smart Microgrid Supplied With Wind EnergyDocument6 pagesElectric Vehicles Charging in A Smart Microgrid Supplied With Wind Energys s krishnappaNo ratings yet
- Muralidharetal IEEE Vol23pp36015042013 PDFDocument5 pagesMuralidharetal IEEE Vol23pp36015042013 PDFGianc87No ratings yet
- Installation Vessels of Offshore Wind Farms and Their Take-Off SystemsDocument12 pagesInstallation Vessels of Offshore Wind Farms and Their Take-Off SystemsPriscila KImNo ratings yet
- 1 s2.0 S2096511720300463 MainDocument8 pages1 s2.0 S2096511720300463 MainDaniel Trovao SimoesNo ratings yet
- Applsci 11 05561Document19 pagesApplsci 11 05561Данило Дача РистовићNo ratings yet
- Cold Ironing and Onshore Generation For Airborne Emission ReductionsDocument34 pagesCold Ironing and Onshore Generation For Airborne Emission ReductionsyoungfpNo ratings yet
- HVDC Connection of Offshore Wind Farms To TheDocument7 pagesHVDC Connection of Offshore Wind Farms To TheLalith KrishnanNo ratings yet
- Analysis and Design of Monopile Foundations For Offshore Wind and Tidal Turbine StructuresDocument18 pagesAnalysis and Design of Monopile Foundations For Offshore Wind and Tidal Turbine StructuresAbdullah Kürşat DemirNo ratings yet
- Norway As A Battery For The Future European Power System-Impacts On The Hydropower SystemDocument25 pagesNorway As A Battery For The Future European Power System-Impacts On The Hydropower SystemSeffds LmlmqsdmlNo ratings yet
- Vocational Training in A 132 KV SubstationDocument69 pagesVocational Training in A 132 KV SubstationRahul SahaNo ratings yet
- Electricity in UKDocument4 pagesElectricity in UKhugogallagherNo ratings yet
- Loss Evaluation of HVAC and HVDC Transmission Solutions For Large Offshore Wind FarmsDocument11 pagesLoss Evaluation of HVAC and HVDC Transmission Solutions For Large Offshore Wind Farmsmohon_eee03100% (2)
- HVDC Link Upgrade in New ZealandDocument16 pagesHVDC Link Upgrade in New ZealandLonny AtienoNo ratings yet
- Out of Troubled Waters - Getting A Grip On Offshore Cabling: Thomas Boehme, Principal EngineerDocument5 pagesOut of Troubled Waters - Getting A Grip On Offshore Cabling: Thomas Boehme, Principal EngineerJACKNo ratings yet
- PytonCode-PSSE FULLTEXT01Document105 pagesPytonCode-PSSE FULLTEXT01fpttmm100% (1)
- CIGRE Paper 2006 C1-205 - Grebe - EtalDocument8 pagesCIGRE Paper 2006 C1-205 - Grebe - EtalEckhard GrebeNo ratings yet
- Improvement of Cable Current Carrying Capacity Using COMSOL SoftwareDocument12 pagesImprovement of Cable Current Carrying Capacity Using COMSOL SoftwareLisaNo ratings yet
- Cables (HT<) : Energy Estimation & Audit (15ee430)Document73 pagesCables (HT<) : Energy Estimation & Audit (15ee430)rohith mukkamalaNo ratings yet
- The Norned HVDC Cable LinkDocument6 pagesThe Norned HVDC Cable LinkardiwilagagunNo ratings yet
- HVDC The Next GenerationDocument9 pagesHVDC The Next Generationkushwahpankajsingh1984No ratings yet
- Developing A Transnational Electricity Infrastructure Offshore: Interdependence Between Technical and Regulatory SolutionsDocument6 pagesDeveloping A Transnational Electricity Infrastructure Offshore: Interdependence Between Technical and Regulatory SolutionsumairNo ratings yet
- Voltage Upgrading - An Insulation Coordination Challenge: June 2011Document9 pagesVoltage Upgrading - An Insulation Coordination Challenge: June 2011ManafNo ratings yet
- ICOE2010 Grid Connection of Arrays LastDocument7 pagesICOE2010 Grid Connection of Arrays LastJoseba LmNo ratings yet
- Economie PDFDocument11 pagesEconomie PDFhakimNo ratings yet
- Offshore Wind Energy in Europe - A Review of The State-of-the-ArtDocument18 pagesOffshore Wind Energy in Europe - A Review of The State-of-the-ArtKtk ZadNo ratings yet
- Feasibility Study For A West Danish Hydrogen Transmission GridDocument8 pagesFeasibility Study For A West Danish Hydrogen Transmission Gridsnikraftar1406No ratings yet
- Impacts of Large-Scale PV Integration in a Mesh LV NetworkDocument4 pagesImpacts of Large-Scale PV Integration in a Mesh LV NetworkAlwin Anno SastraNo ratings yet
- Drew, B., Plummer, A.R., Sahinkaya, M.N. A Review of Wave Energy Converter Technology. 2009 PDFDocument16 pagesDrew, B., Plummer, A.R., Sahinkaya, M.N. A Review of Wave Energy Converter Technology. 2009 PDFAbhiNo ratings yet
- Sweden's Future Electrical GridDocument56 pagesSweden's Future Electrical GridsaurabhNo ratings yet
- Ultra High-Voltage Gas-Insulated Switchgear - A Technology MilestoneDocument24 pagesUltra High-Voltage Gas-Insulated Switchgear - A Technology MilestoneSa'dun ArifNo ratings yet
- AquaBuOY 1:10 Scale Model TestDocument15 pagesAquaBuOY 1:10 Scale Model Testtrep8888No ratings yet
- Literature Review of Wind Power GenerationDocument5 pagesLiterature Review of Wind Power Generationafdtrajxq100% (1)
- Series Connection of Offshore DC Wind Turbines: Mini Project in TET 4190 Power ElectronicsDocument15 pagesSeries Connection of Offshore DC Wind Turbines: Mini Project in TET 4190 Power ElectronicsKunal SinghNo ratings yet
- New Approaches to the Design and Economics of EHV Transmission Plant: International Series of Monographs in Electrical EngineeringFrom EverandNew Approaches to the Design and Economics of EHV Transmission Plant: International Series of Monographs in Electrical EngineeringNo ratings yet
- 1ZSE954001-21 - VSR - Pamphlet Line Connected REACTORSDocument4 pages1ZSE954001-21 - VSR - Pamphlet Line Connected REACTORSAmmar Lateef GakharNo ratings yet
- Additional Request Form PDFDocument2 pagesAdditional Request Form PDFBholay GNo ratings yet
- Energies: Short-Term Electricity Demand Forecasting: Impact Analysis of Temperature For ThailandDocument29 pagesEnergies: Short-Term Electricity Demand Forecasting: Impact Analysis of Temperature For ThailandAmmar Lateef GakharNo ratings yet
- Power-Quality Improvement in AC Railway Substations: The Concept of Chopper-Controlled ImpedanceDocument10 pagesPower-Quality Improvement in AC Railway Substations: The Concept of Chopper-Controlled ImpedanceAmmar Lateef GakharNo ratings yet
- Bremen S 100-MW Static Frequency Link: ABB Review ArticleDocument17 pagesBremen S 100-MW Static Frequency Link: ABB Review ArticleAmmar Lateef GakharNo ratings yet
- Transmission Loss StrategyDocument42 pagesTransmission Loss StrategyAmmar Lateef GakharNo ratings yet
- Low-Power Instrument Transformer (LPIT) : Technology For Protection and MeteringDocument3 pagesLow-Power Instrument Transformer (LPIT) : Technology For Protection and MeteringAmmar Lateef GakharNo ratings yet
- From Products To System Intelligence: Born Connected 3.0Document5 pagesFrom Products To System Intelligence: Born Connected 3.0Ammar Lateef GakharNo ratings yet
- Crystal Rig 400kV Substation Extension: Consultation Environmental ReportDocument2 pagesCrystal Rig 400kV Substation Extension: Consultation Environmental ReportAmmar Lateef GakharNo ratings yet
- 2020 08 Siemens Energy Blue Portfolio Customer Presentation enDocument37 pages2020 08 Siemens Energy Blue Portfolio Customer Presentation enAmmar Lateef GakharNo ratings yet
- 132kV Normal RingDocument1 page132kV Normal RingAmmar Lateef GakharNo ratings yet
- 2020 11 8vn1 Blue Gis 145kv Non Eu FinalDocument2 pages2020 11 8vn1 Blue Gis 145kv Non Eu FinalAmmar Lateef Gakhar0% (1)
- Cable Sizing Chart for 415V Motor FeedersDocument22 pagesCable Sizing Chart for 415V Motor FeedersAmmar Lateef GakharNo ratings yet
- Sensformer® Advanced: Scale Up Your Digital Power TransformerDocument4 pagesSensformer® Advanced: Scale Up Your Digital Power TransformerAmmar Lateef GakharNo ratings yet
- Guidelines For Location of Electrical Distribution SubstationDocument12 pagesGuidelines For Location of Electrical Distribution SubstationwaleedNo ratings yet
- PT 6010 Sizing Fire Apps enDocument3 pagesPT 6010 Sizing Fire Apps enjosehenriquezsotoNo ratings yet
- Advantages of Fixed Circuit Breaker - 2009 PDFDocument10 pagesAdvantages of Fixed Circuit Breaker - 2009 PDFAlfredo ApNo ratings yet
- Calculation of Losses PDFDocument9 pagesCalculation of Losses PDFAhmed H. HassanNo ratings yet
- What Is A Motor Protection Circuit Breaker and What Are Its FunctionsDocument6 pagesWhat Is A Motor Protection Circuit Breaker and What Are Its FunctionsAmmar Lateef GakharNo ratings yet
- Fire Pump Breakers 0100DB0711Document2 pagesFire Pump Breakers 0100DB0711Simon MendozaNo ratings yet
- Molded Case Circuit BreakerDocument4 pagesMolded Case Circuit BreakerAmmar Lateef GakharNo ratings yet
- COMMSCOPE CAT6 - CAT5E Patch PanelDocument3 pagesCOMMSCOPE CAT6 - CAT5E Patch PanelZulkifle Norul NizaNo ratings yet
- The Edison Cell - Nuts & Volts MagazineDocument17 pagesThe Edison Cell - Nuts & Volts MagazineVictor Campos Sales Victor SalesNo ratings yet
- Data Sheet: Genset Controller, GC-1FDocument20 pagesData Sheet: Genset Controller, GC-1FoscarafonsoNo ratings yet
- Name: - Score: - Grade and Section: - DateDocument1 pageName: - Score: - Grade and Section: - DateJoanna Marie VillamarNo ratings yet
- Manual - SB60Document11 pagesManual - SB60Bob EonNo ratings yet
- User Manual en Underwater-Light EL-H200 EMLI16082533Document2 pagesUser Manual en Underwater-Light EL-H200 EMLI16082533juanjtoroNo ratings yet
- Title: Decoder Instruction AimsDocument4 pagesTitle: Decoder Instruction Aimssuv_fameNo ratings yet
- Atlas Copco Neos Xchange KitsDocument17 pagesAtlas Copco Neos Xchange KitsahmedalgaloNo ratings yet
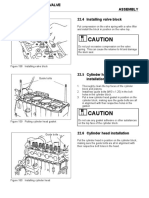
- Install and adjust cylinder head valvesDocument96 pagesInstall and adjust cylinder head valvesLudwig Levallet100% (1)
- Test & Tag Reading Material V1 - 1 Mar 2017Document10 pagesTest & Tag Reading Material V1 - 1 Mar 2017Pham Thanh PhucNo ratings yet
- TLC4501 OpampDocument38 pagesTLC4501 OpampCartoon KidsNo ratings yet
- Lecture 23Document6 pagesLecture 23Rakesh AshokNo ratings yet
- Electricity Tariffs Power Outages and Firm PerformanceDocument41 pagesElectricity Tariffs Power Outages and Firm PerformanceIván Camilo Díez100% (2)
- Electrical Equipment: LightingDocument31 pagesElectrical Equipment: LightinglimadacarlosNo ratings yet
- Nirma University: InstructionsDocument3 pagesNirma University: InstructionsBHENSDADIYA KEVIN PRABHULALNo ratings yet
- Series: Operator ManualDocument37 pagesSeries: Operator ManualAbdelwhab ElsaftyNo ratings yet
- g214599 Hmod 65 Paulander DR Kitchener DWGDocument2 pagesg214599 Hmod 65 Paulander DR Kitchener DWGJhonn StevNo ratings yet
- Dem 128064G FGH-PW PDFDocument16 pagesDem 128064G FGH-PW PDFEdisson Alarcon MoraNo ratings yet
- Schmersal Safety Switch Datasheet Az 16 02zvk 1426622599 PDFDocument9 pagesSchmersal Safety Switch Datasheet Az 16 02zvk 1426622599 PDFDoninho LimaNo ratings yet
- Arulprakasajothi 2021Document4 pagesArulprakasajothi 2021kutluuNo ratings yet
- 10.1109-IDT.2008.4802471-System Level Design of Radio Frequency Receiver For IEEE 802.16 StandardDocument5 pages10.1109-IDT.2008.4802471-System Level Design of Radio Frequency Receiver For IEEE 802.16 StandardAsghar FarhadiNo ratings yet
- DC Power Transmission TechnologyDocument10 pagesDC Power Transmission TechnologyDrVikas Singh BhadoriaNo ratings yet
- Vitrek 4670BDocument2 pagesVitrek 4670BJorge Cardona GilNo ratings yet
- LG Inverter PCB CircuitDocument1 pageLG Inverter PCB CircuitP.Rajan Guru100% (2)
- UPS - 1 - 3kVA - VRLA - Spec SheetDocument7 pagesUPS - 1 - 3kVA - VRLA - Spec SheetVictor JuarezNo ratings yet
- 1A Bipolar Linear Regulator AMS1117 Technical Reference GuideDocument7 pages1A Bipolar Linear Regulator AMS1117 Technical Reference GuideFelipe silva santanaNo ratings yet
- Lithium-Ion GuideDocument68 pagesLithium-Ion GuideVasyaNo ratings yet
- Fuel Filter Differential Pressure Switch Circuit - Test (RENR5096)Document3 pagesFuel Filter Differential Pressure Switch Circuit - Test (RENR5096)Josip MiškovićNo ratings yet
- Safety and Reference: Owner'S ManualDocument40 pagesSafety and Reference: Owner'S ManualRaj ThakurNo ratings yet
- Nonlinear Wave ShapingDocument17 pagesNonlinear Wave ShapingapnraoNo ratings yet