You might also like
- Time Integration Techniques For Richards Equation: International Conference On Computational Science, ICCS 2012Document9 pagesTime Integration Techniques For Richards Equation: International Conference On Computational Science, ICCS 2012Ghizlane AlbarakaNo ratings yet
- A Mathematical Model For Hyperbolic Space Fractional Biohe 2015 Procedia EngDocument7 pagesA Mathematical Model For Hyperbolic Space Fractional Biohe 2015 Procedia EngBryan JohnNo ratings yet
- Multi-Objective Optimal Design of Water Distribution Networks Accounting For Transient ImpactsDocument49 pagesMulti-Objective Optimal Design of Water Distribution Networks Accounting For Transient ImpactsOmarNo ratings yet
- Simulation of Two-Phase Flows in Vertical Tubes With The CFDDocument12 pagesSimulation of Two-Phase Flows in Vertical Tubes With The CFDdigecaNo ratings yet
- SampleDocument110 pagesSamplesouaid.hussen161anNo ratings yet
- Applied Mathematics and MechanicsDocument12 pagesApplied Mathematics and MechanicsAmir MoradiNo ratings yet
- Fast Solvers For Thermal Fluid Structure InteractionDocument11 pagesFast Solvers For Thermal Fluid Structure InteractionBara AlsayedNo ratings yet
- A Computational Simulation of Steady Natural Convection in An H-Form CavityDocument16 pagesA Computational Simulation of Steady Natural Convection in An H-Form CavitySattar Al-JabairNo ratings yet
- Implementation and Validation of A Free Open Source 1DWater Hammer CodeDocument49 pagesImplementation and Validation of A Free Open Source 1DWater Hammer CodeDario Andres Serrano FlorezNo ratings yet
- Processes: Optimization of Polymer Extrusion Die Based On Response Surface MethodDocument14 pagesProcesses: Optimization of Polymer Extrusion Die Based On Response Surface MethodFebri Muhamad RoziNo ratings yet
- Water: CFD Simulations of Multiphase Flows: Interaction of Miscible Liquids With DiDocument18 pagesWater: CFD Simulations of Multiphase Flows: Interaction of Miscible Liquids With DiSaswataChakrabortyNo ratings yet
- WJM 2015111313554989Document11 pagesWJM 2015111313554989umyNo ratings yet
- 1 s2.0 S2211379721002783 MainDocument14 pages1 s2.0 S2211379721002783 MainEl-Mehdi FarahNo ratings yet
- Numerical Study Between Structured and Unstructured Meshes For Euler and Navier-Stokes EquationsDocument13 pagesNumerical Study Between Structured and Unstructured Meshes For Euler and Navier-Stokes EquationsLam DesmondNo ratings yet
- Computers and Mathematics With Applications: M. Keimanesh, M.M. Rashidi, Ali J. Chamkha, R. JafariDocument21 pagesComputers and Mathematics With Applications: M. Keimanesh, M.M. Rashidi, Ali J. Chamkha, R. JafariManikiranSaiNo ratings yet
- Thin-Layer Method: Formulation in The Time DomainDocument15 pagesThin-Layer Method: Formulation in The Time DomainTarun NaskarNo ratings yet
- Numerical Solution of A Fractal-Fractional Order CDocument18 pagesNumerical Solution of A Fractal-Fractional Order Czohaibhasssn87No ratings yet
- Computers and Mathematics With Applications: Rudolf Scherer, Shyam L. Kalla, Yifa Tang, Jianfei HuangDocument16 pagesComputers and Mathematics With Applications: Rudolf Scherer, Shyam L. Kalla, Yifa Tang, Jianfei HuangWalaa AltamimiNo ratings yet
- Surge Analysis and Design Case StudyDocument10 pagesSurge Analysis and Design Case StudyRitwick MishraNo ratings yet
- PP 533-541 HEAT AND MASS TRANSFER IN A SHRINKING CYLINDER DRYINGDocument9 pagesPP 533-541 HEAT AND MASS TRANSFER IN A SHRINKING CYLINDER DRYINGelatani100% (1)
- On The Global Existence For The Muskat Problem: DOI 10.4171/JEMS/360Document27 pagesOn The Global Existence For The Muskat Problem: DOI 10.4171/JEMS/360Alvaro MejiaNo ratings yet
- MHD Mixed Convection Nanofluid Flow Through A Stratified Radiative Stretching CylinderDocument10 pagesMHD Mixed Convection Nanofluid Flow Through A Stratified Radiative Stretching CylinderIJRASETPublicationsNo ratings yet
- Chapter 16 - CFD PDFDocument28 pagesChapter 16 - CFD PDFdeepakNo ratings yet
- A MATLAB Method of Lines Template For Evolution EquationsDocument6 pagesA MATLAB Method of Lines Template For Evolution EquationsDag GetNo ratings yet
- TMP 894 ADocument11 pagesTMP 894 AFrontiersNo ratings yet
- zyaseen,+KBES Paper 4Document8 pageszyaseen,+KBES Paper 4Eduardo Antonio Burgos RuidíasNo ratings yet
- 2016 2 Art 05 PDFDocument12 pages2016 2 Art 05 PDFLeslie Darien Pérez FernándezNo ratings yet
- Applied Mathematics and MechanicsDocument12 pagesApplied Mathematics and MechanicswalacrNo ratings yet
- Canzano Et Al 2012 Use and Misuse of Sorption Kinetic Data A Common Mistake That Should Be AvoidedDocument9 pagesCanzano Et Al 2012 Use and Misuse of Sorption Kinetic Data A Common Mistake That Should Be AvoidedPhúc Nguyễn BáNo ratings yet
- Wilson Roth IqbalDocument10 pagesWilson Roth IqbalWilliam JaimesNo ratings yet
- Ref44 Graph RelativeDocument20 pagesRef44 Graph RelativedeepNo ratings yet
- Pressure and Pressure Analysis For Double-Permeability Systems Without Type-Curve MatchingDocument7 pagesPressure and Pressure Analysis For Double-Permeability Systems Without Type-Curve MatchingfreddyescobarNo ratings yet
- Almost Sharp Fronts For The Surface Geostrophic Equation: SignificanceDocument4 pagesAlmost Sharp Fronts For The Surface Geostrophic Equation: SignificanceNeil JethaniNo ratings yet
- Simulation Versus Design: Two Case Studies in Chemical Reaction Kinetics and Radiative Heat TransferDocument7 pagesSimulation Versus Design: Two Case Studies in Chemical Reaction Kinetics and Radiative Heat TransferULISESNo ratings yet
- Application of The Monte Carlo Method To The Solution of Heat Transfer Problem in NanofluidsDocument8 pagesApplication of The Monte Carlo Method To The Solution of Heat Transfer Problem in NanofluidsMuhFachrulNo ratings yet
- Dirac's Magnetic Monopoles (Again)Document7 pagesDirac's Magnetic Monopoles (Again)uğur tamerNo ratings yet
- Analytical Solutions For Diffusive Finite Reservoir Problems Using A Modified Orthogonal Expansion MethodDocument14 pagesAnalytical Solutions For Diffusive Finite Reservoir Problems Using A Modified Orthogonal Expansion MethodFadel MuhammadNo ratings yet
- Transferencia en MotoresDocument6 pagesTransferencia en MotoresAlexander Eduardo Rojas RojasNo ratings yet
- Analysis On The Time and Frequency Domain For The RC Electric Circuit of Fractional OrderDocument6 pagesAnalysis On The Time and Frequency Domain For The RC Electric Circuit of Fractional Orderyashalbhavi765No ratings yet
- Numerical Simulation of A Thermoacoustic Refrigerator: II. Stratified Flow Around The StackDocument26 pagesNumerical Simulation of A Thermoacoustic Refrigerator: II. Stratified Flow Around The StacksaekNo ratings yet
- Introduction To Computational Fluid Dynamics: Dmitri KuzminDocument34 pagesIntroduction To Computational Fluid Dynamics: Dmitri KuzminmanigandanNo ratings yet
- On The Study of Viscous Fluid Due To Exponentially Shrinking Sheet in The Presence of Thermal RadiationDocument6 pagesOn The Study of Viscous Fluid Due To Exponentially Shrinking Sheet in The Presence of Thermal RadiationRoberticoZeaNo ratings yet
- Introduction To Computational Fluid Dynamics: Dmitri KuzminDocument34 pagesIntroduction To Computational Fluid Dynamics: Dmitri Kuzminmanigandan100% (1)
- Entropy: Modeling of A Mass-Spring-Damper System by Fractional Derivatives With and Without A Singular KernelDocument15 pagesEntropy: Modeling of A Mass-Spring-Damper System by Fractional Derivatives With and Without A Singular KernelIrawan MalikNo ratings yet
- Applications - of - Thermodynamics - To - Study - The - Physical Phenomenon of Heat ConductionDocument6 pagesApplications - of - Thermodynamics - To - Study - The - Physical Phenomenon of Heat ConductionBambu TiraiNo ratings yet
- Flow AnalysisDocument18 pagesFlow Analysisanujkumartyagi9275No ratings yet
- (Journal of Hydrology and Hydromechanics) Exact Analytical Solutions For Contaminant Transport in Rivers PDFDocument10 pages(Journal of Hydrology and Hydromechanics) Exact Analytical Solutions For Contaminant Transport in Rivers PDFRodrigo LeioneNo ratings yet
- Advanced Transport Phenomena Module 9 Lecture 40: Students Exercises: Numerical Questions (Modules 6-8)Document19 pagesAdvanced Transport Phenomena Module 9 Lecture 40: Students Exercises: Numerical Questions (Modules 6-8)shashwatNo ratings yet
- Labyrinth SealDocument9 pagesLabyrinth SealAyouba FOFANANo ratings yet
- An Efficient Algorithm For The Evaluation of Convolution IntegralsDocument22 pagesAn Efficient Algorithm For The Evaluation of Convolution IntegralsCarlangasPardoNo ratings yet
- Optik: Original Research ArticleDocument14 pagesOptik: Original Research ArticleBaljinderNo ratings yet
- InTech-Study Regarding Numerical Simulation of Counter Flow Plate Heat ExchangerDocument16 pagesInTech-Study Regarding Numerical Simulation of Counter Flow Plate Heat ExchangerSamiullah QureshiNo ratings yet
- Coupling Moisture Transport in Air Flows and Porous Materials Using CFDDocument8 pagesCoupling Moisture Transport in Air Flows and Porous Materials Using CFDgetsweetNo ratings yet
- 4109 Wias1169-1Document45 pages4109 Wias1169-1dibekayaNo ratings yet
- Solving Burgers' Equation With Quantum ComputingDocument13 pagesSolving Burgers' Equation With Quantum Computingsingh_mathitbhu5790No ratings yet
- The Diffusion Model of Fractal Heat and Mass Transfer in Fluidized Bed A Local Fractional Arbitrary Euler-Lagrange FormulaDocument7 pagesThe Diffusion Model of Fractal Heat and Mass Transfer in Fluidized Bed A Local Fractional Arbitrary Euler-Lagrange Formulajose.gonzalez4060No ratings yet
- Parallel Multigrid Finite Volume Computation of Three-Dimensional Thermal Convection - 98-1188Document29 pagesParallel Multigrid Finite Volume Computation of Three-Dimensional Thermal Convection - 98-1188Florin VladNo ratings yet
- Study of Robust and Efficient Turbulence Closures For Aerospace ApplicationsDocument20 pagesStudy of Robust and Efficient Turbulence Closures For Aerospace ApplicationsJunior PleuraNo ratings yet
- Comparison Between Fluent and FDSDocument11 pagesComparison Between Fluent and FDSSuraj MulayNo ratings yet
- Effects of Grain Size Gradation On The Porosity of Packed Heap Leach BedsDocument7 pagesEffects of Grain Size Gradation On The Porosity of Packed Heap Leach BedsPatricio Saldaña MirandaNo ratings yet
- Effect of Ore Size and Heap Porosity On Capillary Process Inside Leaching HeapDocument7 pagesEffect of Ore Size and Heap Porosity On Capillary Process Inside Leaching HeapPatricio Saldaña MirandaNo ratings yet
- Drawing Down The Reamaining Copper Invntory in A Leach Pad by Way Ofsubsurface LeachingDocument23 pagesDrawing Down The Reamaining Copper Invntory in A Leach Pad by Way Ofsubsurface LeachingPatricio Saldaña MirandaNo ratings yet
- Assesing The of Leakege From Heap Leach Pads Used in Mining OperationsDocument8 pagesAssesing The of Leakege From Heap Leach Pads Used in Mining OperationsPatricio Saldaña MirandaNo ratings yet
- Liquid Spread Mechanisms in High-Temperature Underground Stope LeachingDocument11 pagesLiquid Spread Mechanisms in High-Temperature Underground Stope LeachingPatricio Saldaña MirandaNo ratings yet
- Investigation of Grounwater Table Distribution Using Borehole Piezometer Data Interpolation - Case Study of SingaporeDocument13 pagesInvestigation of Grounwater Table Distribution Using Borehole Piezometer Data Interpolation - Case Study of SingaporePatricio Saldaña MirandaNo ratings yet
- Mineralogy As A Rate-Limiting Factor in Large Particle LeachingDocument15 pagesMineralogy As A Rate-Limiting Factor in Large Particle LeachingPatricio Saldaña MirandaNo ratings yet
- Engineering Geology: Hyuck Jin Park, Jung Hyun Lee, Ik WooDocument15 pagesEngineering Geology: Hyuck Jin Park, Jung Hyun Lee, Ik WooPatricio Saldaña MirandaNo ratings yet
- Piezometer Measumerent of Prefabricated Vertical Drain Improvement of Soft Soil Under Land Reclamation FillDocument10 pagesPiezometer Measumerent of Prefabricated Vertical Drain Improvement of Soft Soil Under Land Reclamation FillPatricio Saldaña MirandaNo ratings yet
- Basic Principles: Conservation of EnergyDocument7 pagesBasic Principles: Conservation of Energyzehra001No ratings yet
- Assignment 7 2Document3 pagesAssignment 7 2api-690877335No ratings yet
- Hovercraft Base & Slipways InformationDocument7 pagesHovercraft Base & Slipways InformationJESÚS DAVID DÍAZ CORTÉSNo ratings yet
- Vortex Panel Method For Calculating Airfoil CharaceristicsDocument7 pagesVortex Panel Method For Calculating Airfoil CharaceristicsNickunj PatelNo ratings yet
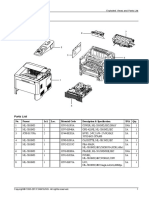
- ML 5010NDDocument34 pagesML 5010NDrodrigo pevidorNo ratings yet
- 3 TorsionDocument26 pages3 TorsionataNo ratings yet
- Quote To JAMES JIM TIMAKADocument5 pagesQuote To JAMES JIM TIMAKAGerald ObalimNo ratings yet
- Keynote Speaker - Prof. S. Talukdar - Vehicle Induced Dynamic Response of A Bridge and Moving Load EstimationDocument6 pagesKeynote Speaker - Prof. S. Talukdar - Vehicle Induced Dynamic Response of A Bridge and Moving Load Estimationdigvijay singhNo ratings yet
- Stigler 2016Document108 pagesStigler 2016Nazanin GhasemiNo ratings yet
- A Review Electrospinning and Electrospinning Nanofibre Technology, Process & ApplicationDocument11 pagesA Review Electrospinning and Electrospinning Nanofibre Technology, Process & ApplicationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Newton ApplicationsDocument22 pagesNewton ApplicationsAyham SmadiNo ratings yet
- Haldimann Structural Use of Glass Book PDFDocument221 pagesHaldimann Structural Use of Glass Book PDFDAVID LOPES DOS SANTOSNo ratings yet
- Probe Measurements of Electron-Energy Distributions in Plasmas: What Can We Measure and How Can We Achieve Reliable Results?Document32 pagesProbe Measurements of Electron-Energy Distributions in Plasmas: What Can We Measure and How Can We Achieve Reliable Results?muhammad usmanNo ratings yet
- 007 Fluid System and Thermal SystemsDocument40 pages007 Fluid System and Thermal SystemsMario HanyNo ratings yet
- Further Pure Mathematics FP3: Pearson Edexcel GCEDocument28 pagesFurther Pure Mathematics FP3: Pearson Edexcel GCEQi HuangNo ratings yet
- Stewart Swerdlow - Blue Blood True BloodDocument125 pagesStewart Swerdlow - Blue Blood True BloodZoltán NagyNo ratings yet
- MasterFiber 154 - 155Document2 pagesMasterFiber 154 - 155aruncg2No ratings yet
- The Fundamental Unit of Life - Hand Written Notes - The Fundamental Unit of Life - Hand Written Notes - Adobe Scan 16-Jun-2021 (1) (1) - CompressedDocument19 pagesThe Fundamental Unit of Life - Hand Written Notes - The Fundamental Unit of Life - Hand Written Notes - Adobe Scan 16-Jun-2021 (1) (1) - CompressedNikhil Kumar NiralaNo ratings yet
- HybradizationDocument6 pagesHybradizationUbaid UllahNo ratings yet
- NTN CatalogDocument50 pagesNTN CatalogThiên VõNo ratings yet
- Páginas de 500 PGDocument1 pagePáginas de 500 PGpeterNo ratings yet
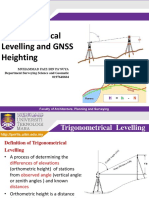
- Chapter 2 Trigonometric HeightingDocument22 pagesChapter 2 Trigonometric HeightingMuhdFikriNo ratings yet
- Muhammad Al-Karaji - A Mathematician Engineer From The Early 11th Century Muslim HeritageDocument18 pagesMuhammad Al-Karaji - A Mathematician Engineer From The Early 11th Century Muslim HeritageRaja AleeyaNo ratings yet
- Brosur MCJDocument24 pagesBrosur MCJPrinan TonoNo ratings yet
- Lec 7Document97 pagesLec 7selaroth168No ratings yet
- Types of Elements Used in Finite Element AnalysisDocument6 pagesTypes of Elements Used in Finite Element AnalysisTayyab ZafarNo ratings yet
- 02 Lambauer Chapter2.4Document16 pages02 Lambauer Chapter2.4showravNo ratings yet
- Split Range Control and Valve Position ControlDocument36 pagesSplit Range Control and Valve Position ControlItss Mee HadiNo ratings yet
- Mccune Sandra Clark William Mcgrawhills 500 Precalculus QuesDocument174 pagesMccune Sandra Clark William Mcgrawhills 500 Precalculus QuesGwynbleidd WitcherNo ratings yet
- Complex Numbers WorksheetDocument4 pagesComplex Numbers WorksheetSoundarya SivakumarNo ratings yet