You might also like
- Oxford Guide 2022Document70 pagesOxford Guide 2022Dương Nguyễn Tùng PhươngNo ratings yet
- Hydrographic SurveyingDocument65 pagesHydrographic Surveying205097871% (7)
- David Wilkinson-The Essential Guide To Postgraduate Study (Sage Study Skills Series) (2005) PDFDocument337 pagesDavid Wilkinson-The Essential Guide To Postgraduate Study (Sage Study Skills Series) (2005) PDFAlfian Ravi RNo ratings yet
- Sci-Hub - Removing Barriers in The Way of ScienceDocument4 pagesSci-Hub - Removing Barriers in The Way of ScienceDavid Uriostegui0% (1)
- Chapter One 1.0 Background of The StudyDocument11 pagesChapter One 1.0 Background of The StudyAyoola OlamideNo ratings yet
- Hydrographic - Surveying - PDH Farrell-1 PDFDocument38 pagesHydrographic - Surveying - PDH Farrell-1 PDFRaditya Nur RahmanNo ratings yet
- Mapping The Impact of Anthropogenic Processes On The Port Harcourt Shoreline Using Remote Sensing and Global Positioning TechniquesDocument11 pagesMapping The Impact of Anthropogenic Processes On The Port Harcourt Shoreline Using Remote Sensing and Global Positioning TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Determination of Area and Volume From Dredged Geodata Set: M. O. Ekun, R. Ehigiator-Irughe and E. S.OkonofuaDocument6 pagesDetermination of Area and Volume From Dredged Geodata Set: M. O. Ekun, R. Ehigiator-Irughe and E. S.OkonofuahaqquramdhaniNo ratings yet
- 04 Content PDFDocument288 pages04 Content PDFabdul muhyiNo ratings yet
- Cartographie de La Dynamique Du Trait de CoteDocument10 pagesCartographie de La Dynamique Du Trait de CoteEffata KouadioNo ratings yet
- Sensors 19 02788 PDFDocument21 pagesSensors 19 02788 PDFLakshmana KvNo ratings yet
- Bathymetry Mapping For Pioneer Ship Voyages UsingDocument11 pagesBathymetry Mapping For Pioneer Ship Voyages UsinggeorgesapuleteNo ratings yet
- 5 Hydrographic SurveyDocument29 pages5 Hydrographic Surveyscha_linaNo ratings yet
- Shoreline Changes Project ReportDocument31 pagesShoreline Changes Project ReportrajgamedevelopNo ratings yet
- Topic 1 - GLS250Document84 pagesTopic 1 - GLS250BungaaaNo ratings yet
- Jmse 12 00172Document16 pagesJmse 12 00172libnganNo ratings yet
- A Comparison of Interpolation Methods On The Basis of Data ObtainedDocument14 pagesA Comparison of Interpolation Methods On The Basis of Data ObtainedArseni MaximNo ratings yet
- Good Document and UsefulDocument11 pagesGood Document and UsefulAbassyacoubouNo ratings yet
- Hydrographic ReportDocument22 pagesHydrographic ReportMars EarthlingsNo ratings yet
- Article IJETAE 2017 17 59Document12 pagesArticle IJETAE 2017 17 59AKOKPONHOUENo ratings yet
- Identification of Shoreline Changes Along The Coast of Vedaranyam Using EPR ModelDocument8 pagesIdentification of Shoreline Changes Along The Coast of Vedaranyam Using EPR ModelNP VigneshNo ratings yet
- Hydrographic SurveyingDocument12 pagesHydrographic Surveyingemarie8panerio100% (1)
- Priyanka.N, Dipjyoti Gogoi, - H3eVDocument12 pagesPriyanka.N, Dipjyoti Gogoi, - H3eVwcsac2022No ratings yet
- Analysis of Sedimentation of Canals: March 2013Document28 pagesAnalysis of Sedimentation of Canals: March 2013jinkumalakarNo ratings yet
- Simulation of The Evolution of Cross-Shore Beach Profiles Using SBEACH ModellingDocument9 pagesSimulation of The Evolution of Cross-Shore Beach Profiles Using SBEACH ModellingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Impact of Sea Defense Structures On Downdrift Coasts: The Case of Keta in GhanaDocument19 pagesImpact of Sea Defense Structures On Downdrift Coasts: The Case of Keta in Ghanagodjo jiovaniNo ratings yet
- Introduction To Hydrographic Surveying: Topic: Definition of HydrographyDocument52 pagesIntroduction To Hydrographic Surveying: Topic: Definition of HydrographyVictoria Jackson0% (1)
- Basic HydrographyDocument15 pagesBasic HydrographyRIFALDINo ratings yet
- Petroleumand Petrophysical Characteristicsof Obanam Well Obanam Field Niger DeltaDocument10 pagesPetroleumand Petrophysical Characteristicsof Obanam Well Obanam Field Niger DeltaDr-Jitendra VaishNo ratings yet
- Bathymetric Information and Shoreline Delineation Along Anyaogologo River, Rivers State, NigeriaDocument19 pagesBathymetric Information and Shoreline Delineation Along Anyaogologo River, Rivers State, NigeriaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Efficient Beach Erosion MonitoringDocument16 pagesEfficient Beach Erosion MonitoringEduardo CervantesNo ratings yet
- Optimization of Safe Navigability Conditions in Shallow Inland WatersDocument10 pagesOptimization of Safe Navigability Conditions in Shallow Inland WatersAngie DerteanoNo ratings yet
- Coastline Change Detection Using Unmanned Aerial Vehicles andDocument9 pagesCoastline Change Detection Using Unmanned Aerial Vehicles andhaikal shopeeNo ratings yet
- Id Icgcsc 76Document7 pagesId Icgcsc 76godjo jiovaniNo ratings yet
- Multiple Methods Can Be Used For Bathymetric SurveysDocument10 pagesMultiple Methods Can Be Used For Bathymetric SurveysGaurav RajNo ratings yet
- Remote Sensing Application in Monitoring Change of River and Coastlines of Morong, Bataan, PhilippinesDocument8 pagesRemote Sensing Application in Monitoring Change of River and Coastlines of Morong, Bataan, PhilippinesKristine BantayNo ratings yet
- Multi Decadal AssessmentDocument13 pagesMulti Decadal AssessmentMohamed EL BIDAOUINo ratings yet
- Conference PaperDocument13 pagesConference PaperBawa SheriffNo ratings yet
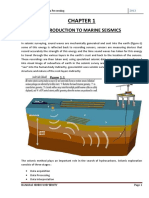
- Final Dissertation Introduction To Marine Seismics PDFDocument66 pagesFinal Dissertation Introduction To Marine Seismics PDFjast5No ratings yet
- Remotesensing-Global Satellite-Based Coastal Bathymetry From WavesDocument14 pagesRemotesensing-Global Satellite-Based Coastal Bathymetry From WavesTungNo ratings yet
- Terrain Analysis, For Determining The Best Location For A Swimming Pool, in Waziri Umaru Federal Polytechnic, Birnin Kebbi, Kebbi StateDocument5 pagesTerrain Analysis, For Determining The Best Location For A Swimming Pool, in Waziri Umaru Federal Polytechnic, Birnin Kebbi, Kebbi StateIOSRjournalNo ratings yet
- Paper: Introduction To Geospatial InformationDocument8 pagesPaper: Introduction To Geospatial Informationbridge itsNo ratings yet
- Wang 2014Document11 pagesWang 2014Komariah ErvitaNo ratings yet
- Settlement Monitoring of Embankment DamsDocument7 pagesSettlement Monitoring of Embankment DamsIsabela BalanNo ratings yet
- GIS Based Analysis of Shoreline Change in Ibeno, Akwa Ibom State, NigeriaDocument14 pagesGIS Based Analysis of Shoreline Change in Ibeno, Akwa Ibom State, NigeriaRestoration2010No ratings yet
- Coastal Erosion and Accretion in Pak Phanang, Thailand by GIS Analysis of Maps and Satellite ImageryDocument10 pagesCoastal Erosion and Accretion in Pak Phanang, Thailand by GIS Analysis of Maps and Satellite ImagerySayedur R ChowdhuryNo ratings yet
- Munitions in The Sea: Possible Links Between CNR-ISMAR Activity and Tools and The DAIMON ProjectDocument19 pagesMunitions in The Sea: Possible Links Between CNR-ISMAR Activity and Tools and The DAIMON ProjectStanisław PopielNo ratings yet
- Chapter 3: Materials and MethodsDocument25 pagesChapter 3: Materials and MethodsGeosemsemNo ratings yet
- J Ocecoaman 2021 105632Document15 pagesJ Ocecoaman 2021 105632Hoàng CXNo ratings yet
- Khomsin 2021 IOP Conf. Ser. Earth Environ. Sci. 731 012039Document15 pagesKhomsin 2021 IOP Conf. Ser. Earth Environ. Sci. 731 012039Albab OnyonNo ratings yet
- Jurnal 2Document10 pagesJurnal 2MuhammadMufliFajarNo ratings yet
- Rocky Shoreline Extraction Using A Deep Learning Model and Object-Based Image AnalysisDocument8 pagesRocky Shoreline Extraction Using A Deep Learning Model and Object-Based Image AnalysisDr-Med Djaoued SoltaniNo ratings yet
- Cetn II 31 GrosskopfDocument12 pagesCetn II 31 GrosskopfblaNo ratings yet
- Petrophysical Reservoir Characterisation and Flow Unit Assessment of D-3 Reservoir Sands Vin Field, Niger DeltaDocument20 pagesPetrophysical Reservoir Characterisation and Flow Unit Assessment of D-3 Reservoir Sands Vin Field, Niger DeltaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Notes HydrographicSurveyingDocument43 pagesNotes HydrographicSurveyingFred WasikeNo ratings yet
- Azhary 2016 IOP Conf. Ser. Mater. Sci. Eng. 136 012087Document11 pagesAzhary 2016 IOP Conf. Ser. Mater. Sci. Eng. 136 012087Sivaiah BorraNo ratings yet
- Sensors: Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 ImagesDocument20 pagesSensors: Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 ImagesLennert PronkNo ratings yet
- Dredging and Reclamation WorksDocument9 pagesDredging and Reclamation WorksWellfroNo ratings yet
- Oceans PDFDocument94 pagesOceans PDFDaniel CadenaNo ratings yet
- Historic Shoreline Changes An Indicator of CoastalDocument10 pagesHistoric Shoreline Changes An Indicator of CoastalLakshmana KvNo ratings yet
- 10 11648 J Cse 20200402 11Document16 pages10 11648 J Cse 20200402 11ebagalan2022No ratings yet
- High Resolution Sentinel-2 Images For Improved Bathymetric Mapping of Coastal and Lake EnvironmentsDocument19 pagesHigh Resolution Sentinel-2 Images For Improved Bathymetric Mapping of Coastal and Lake EnvironmentshamadNo ratings yet
- Kelas B - Muhammad Arifali R - 118300027 - Tugas 2Document5 pagesKelas B - Muhammad Arifali R - 118300027 - Tugas 2Raja hendrawsoNo ratings yet
- F (X) X 4 - X 3 - 2x 2 + 4x - 4 0 Yogi PratamaDocument1 pageF (X) X 4 - X 3 - 2x 2 + 4x - 4 0 Yogi PratamaRaja hendrawsoNo ratings yet
- Kelas A - Indra Pratama - 118300022 - Tugas 2.1Document5 pagesKelas A - Indra Pratama - 118300022 - Tugas 2.1Raja hendrawsoNo ratings yet
- Kelas A - Indra Pratama - 118300022 - Tugas 2Document5 pagesKelas A - Indra Pratama - 118300022 - Tugas 2Raja hendrawsoNo ratings yet
- F (X) X 4 - X 3 - 2x 2 + 4x - 4 0 Yogi PratamaDocument5 pagesF (X) X 4 - X 3 - 2x 2 + 4x - 4 0 Yogi PratamaRaja hendrawsoNo ratings yet
- An Introduction To Onshore Structures' Construction: Kabir Sadeghi, Dania AL-OthmanDocument12 pagesAn Introduction To Onshore Structures' Construction: Kabir Sadeghi, Dania AL-OthmanRaja hendrawsoNo ratings yet
- Deck DesignDocument12 pagesDeck DesignRaja hendrawsoNo ratings yet
- The Collapse of Our MosqueDocument2 pagesThe Collapse of Our MosqueRaja hendrawsoNo ratings yet
- The Spiritual Beings in The Heavenly Bodies and in The Kingdoms of NatureDocument100 pagesThe Spiritual Beings in The Heavenly Bodies and in The Kingdoms of Naturekatburner100% (3)
- Define Statistics: PsychologyDocument6 pagesDefine Statistics: PsychologyAbiy BekeleNo ratings yet
- English - Shs Pr2 - Practical Research 2 Grade: LearningDocument20 pagesEnglish - Shs Pr2 - Practical Research 2 Grade: LearningVERDADERO LevisthoneNo ratings yet
- Practical Research 2Document3 pagesPractical Research 2Mark Aeron AudarNo ratings yet
- EXPERIMENT 1-Error and Data Analysis: (I) Significant FiguresDocument13 pagesEXPERIMENT 1-Error and Data Analysis: (I) Significant FiguresKenya LevyNo ratings yet
- Jee Mains Answer KeyDocument37 pagesJee Mains Answer Keyishushankhwar78No ratings yet
- Practical Datesheet Regular Exam Jan-2022 (Batch-2021) Exam Link Will Be Provided by The Head of The DepartmentDocument22 pagesPractical Datesheet Regular Exam Jan-2022 (Batch-2021) Exam Link Will Be Provided by The Head of The DepartmentAman KumarNo ratings yet
- The Impact of Internet Virtual Physics Laboratory Instruction On The Achievement in Physics, Science Process Skills and Computer Attitudes of 10th-Grade StudentsDocument11 pagesThe Impact of Internet Virtual Physics Laboratory Instruction On The Achievement in Physics, Science Process Skills and Computer Attitudes of 10th-Grade StudentsRandy YimooNo ratings yet
- TOK Presentation ScriptDocument2 pagesTOK Presentation ScriptBubblebudNo ratings yet
- EEE CompressedDocument127 pagesEEE CompressedJatin RajawatNo ratings yet
- Conductors Lesson PlanDocument5 pagesConductors Lesson Planapi-278531329No ratings yet
- Assignment 1 (OBM301) (ONLINE DATABASE)Document8 pagesAssignment 1 (OBM301) (ONLINE DATABASE)mayaimrannNo ratings yet
- Data Analysis PlanDocument2 pagesData Analysis PlanShella Grace U. QuincoNo ratings yet
- CH College MRP Outlines Prescribed by DAVVDocument6 pagesCH College MRP Outlines Prescribed by DAVVPallavi patilNo ratings yet
- Jurnal Model PembelajaranDocument12 pagesJurnal Model PembelajaranIrman ArsyadNo ratings yet
- Inferential Statistics For Data ScienceDocument10 pagesInferential Statistics For Data Sciencersaranms100% (1)
- SPope ECE 640 Science Lesson - Week 2Document6 pagesSPope ECE 640 Science Lesson - Week 2Rob PopeNo ratings yet
- Beginning PsychologyDocument822 pagesBeginning Psychologyandrealene guilledoNo ratings yet
- Sabir Ali Wpex72011Document7 pagesSabir Ali Wpex72011api-321578349No ratings yet
- Sixth Form Open Evening Booklet 2016Document52 pagesSixth Form Open Evening Booklet 2016api-264819644No ratings yet
- Jodi DeanDocument19 pagesJodi DeanThilina DanushkaNo ratings yet
- Chapter 1 IntroductionDocument13 pagesChapter 1 IntroductionlogesNo ratings yet
- 21st Century Teaching and Learning: Ang Pananaw NG Mga PreService Teachers NG Western Mindanao State University Sa Pagiging Epektibo NG Paggamit NG ICT Sa Pagtuturo at Pagkatuto NG WikaDocument10 pages21st Century Teaching and Learning: Ang Pananaw NG Mga PreService Teachers NG Western Mindanao State University Sa Pagiging Epektibo NG Paggamit NG ICT Sa Pagtuturo at Pagkatuto NG WikaAJHSSR JournalNo ratings yet
- The Path of TruthDocument223 pagesThe Path of TruthConsciousSeekerNo ratings yet
- Physical World Question Bank 0Document2 pagesPhysical World Question Bank 0meritutorNo ratings yet
- Experiment Conservation of Momentum PDFDocument2 pagesExperiment Conservation of Momentum PDFPaulNo ratings yet
- What Is The Origin of Man?Document152 pagesWhat Is The Origin of Man?Truth Spreader100% (4)