You might also like
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Bucketwheel stacker reclaimers_Part5Document10 pagesBucketwheel stacker reclaimers_Part5TJBNo ratings yet
- Algebra: X y NC X y N (n+1) A+ BDocument11 pagesAlgebra: X y NC X y N (n+1) A+ BLaissa SerranoNo ratings yet
- 3-07f-4Document4 pages3-07f-4ABC CheckNo ratings yet
- Assignment 5 (MAN 001)Document2 pagesAssignment 5 (MAN 001)Shrey AgarwalNo ratings yet
- HEAT TRANSFER ASSIGNMENT 2 TITLEDocument6 pagesHEAT TRANSFER ASSIGNMENT 2 TITLESameer HansdaNo ratings yet
- Notes On 1 Particle ScatteringDocument5 pagesNotes On 1 Particle ScatteringJuliana HarmatiukNo ratings yet
- Applications of CalculusDocument11 pagesApplications of CalculusSiddharth AcharyaNo ratings yet
- Homework Solution 4Document12 pagesHomework Solution 4Diego OrtizNo ratings yet
- Brachistochrone Problem and It's Real-Life Application On ArchitectureDocument19 pagesBrachistochrone Problem and It's Real-Life Application On ArchitectureKhola KhanNo ratings yet
- Chapter 2 SolutionsDocument46 pagesChapter 2 SolutionsGulrez MNo ratings yet
- PHY3001 Exam 2020-3Document5 pagesPHY3001 Exam 2020-3Catherine GrivotNo ratings yet
- Qmi HW 6Document13 pagesQmi HW 6Matt BeckNo ratings yet
- Orbits in Central Force Fields I: F (r) ρ (r) (r, θ) = F (r) ~ eDocument24 pagesOrbits in Central Force Fields I: F (r) ρ (r) (r, θ) = F (r) ~ eगणित विषयNo ratings yet
- Confluent Heun Functions and The Coulomb Problem For Spin Particle in Minkowski SpaceDocument15 pagesConfluent Heun Functions and The Coulomb Problem For Spin Particle in Minkowski SpaceLuis FuentesNo ratings yet
- Essential Maths and Physics FormulasDocument17 pagesEssential Maths and Physics FormulasdevenderNo ratings yet
- DX X F I or A: Numerical Analysis Ch.3: Numerical IntegrationDocument16 pagesDX X F I or A: Numerical Analysis Ch.3: Numerical Integrationابراهيم حسين عليNo ratings yet
- Integrals DoubledDocument16 pagesIntegrals DoubledsabbysamuraNo ratings yet
- 591 Homework v1 - 3Document45 pages591 Homework v1 - 3Michael FralaideNo ratings yet
- Differential and Integral Calculus 2 - Homework 2 SolutionDocument5 pagesDifferential and Integral Calculus 2 - Homework 2 SolutionDominikNo ratings yet
- Calc 1 Prelim AnswersDocument10 pagesCalc 1 Prelim AnswersNeil MonteroNo ratings yet
- LATEX Practice SummaryDocument5 pagesLATEX Practice SummaryM2C7r6No ratings yet
- Outline of Solutions To Homework 1Document3 pagesOutline of Solutions To Homework 1Michel AndradeNo ratings yet
- National University of Singapore: X X A. Then F X X X X A X A X A XDocument5 pagesNational University of Singapore: X X A. Then F X X X X A X A X A XdkNo ratings yet
- Trigonometry Formulas For Class 12: The Di!erence Between Trigonometric Identities and Trigonometric RatiosDocument7 pagesTrigonometry Formulas For Class 12: The Di!erence Between Trigonometric Identities and Trigonometric RatiosHello HiNo ratings yet
- Integral CalculusDocument120 pagesIntegral CalculusBernadette Boncolmo100% (3)
- mit8_323_s23_pset_01solDocument9 pagesmit8_323_s23_pset_01solAyham ziadNo ratings yet
- Vector Valued FunctionDocument33 pagesVector Valued FunctionFarhan naseenNo ratings yet
- MIT22 15F14 Ex02Document3 pagesMIT22 15F14 Ex02Duy NguyễnNo ratings yet
- T R F R T R: To Seismology Exercise 2Document1 pageT R F R T R: To Seismology Exercise 2UdhamNo ratings yet
- Complex Numbers Additional Notes 1Document11 pagesComplex Numbers Additional Notes 1Jade GurtizaNo ratings yet
- Ps 1Document2 pagesPs 1RandomNo ratings yet
- Exercises - Week 3: Escuela: Ing. Ambiental/Informática Curso: Análisis MatemáticoDocument4 pagesExercises - Week 3: Escuela: Ing. Ambiental/Informática Curso: Análisis MatemáticoMaker 1900No ratings yet
- Mit Double PedulumDocument13 pagesMit Double PedulumAntoineNo ratings yet
- These Problems Are Similar But Not Identical To The Actual Test. One or Two Parts Will Actually Show UpDocument5 pagesThese Problems Are Similar But Not Identical To The Actual Test. One or Two Parts Will Actually Show UphonestcheaterNo ratings yet
- Vector-Valued Functions and Space CurvesDocument5 pagesVector-Valued Functions and Space CurvesMin Hui LeeNo ratings yet
- TMA03 For MST121 Fall 2008-2009 SolvedDocument7 pagesTMA03 For MST121 Fall 2008-2009 SolvedyAlhashim100% (1)
- Top PYQ CalculusDocument16 pagesTop PYQ CalculusGaurav GNo ratings yet
- Vol9 Iss11 5821 - 5829 Residual Power Series Method For TiDocument9 pagesVol9 Iss11 5821 - 5829 Residual Power Series Method For TiSayiqa JabeenNo ratings yet
- Solution Set 3Document11 pagesSolution Set 3HaseebAhmadNo ratings yet
- Suggested Answer: Additional MathematicsDocument20 pagesSuggested Answer: Additional Mathematicsapi-19650882No ratings yet
- MATHEMATICAL TOOLS FOR PHYSICSDocument16 pagesMATHEMATICAL TOOLS FOR PHYSICSJit AggNo ratings yet
- Mathematical Tripos Part III Control of Quantum SystemsDocument5 pagesMathematical Tripos Part III Control of Quantum SystemsKaustubhNo ratings yet
- Ecuaciones Diferenciales Parciales de Logan - Chapter 2 SolutionsDocument14 pagesEcuaciones Diferenciales Parciales de Logan - Chapter 2 SolutionsGibris Suárez MartínezNo ratings yet
- 3.4 Applications of The Double IntegralDocument4 pages3.4 Applications of The Double Integralshamarplummer0923No ratings yet
- Applications of Integration, Pappus Theorem SolutionsDocument4 pagesApplications of Integration, Pappus Theorem SolutionsSan RiaNo ratings yet
- Radhe Attr FDocument3 pagesRadhe Attr FAHMED EL HAMRINo ratings yet
- Answers to Selected Exercises from Differential Equations TextbookDocument9 pagesAnswers to Selected Exercises from Differential Equations TextbookbalterNo ratings yet
- On Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorsDocument12 pagesOn Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorshungkgNo ratings yet
- F) (X) X DT T DT T T F (T DT T T X X T F (T) DT T: N, A+ X A T A T A N N N N X A N 1Document14 pagesF) (X) X DT T DT T T F (T DT T T X X T F (T) DT T: N, A+ X A T A T A N N N N X A N 1TeferiNo ratings yet
- 9781107059320-SOLUTIONS Essential Digital SolutionsDocument47 pages9781107059320-SOLUTIONS Essential Digital SolutionsGulrez MNo ratings yet
- Merkúr Perihélium PrecesszióDocument7 pagesMerkúr Perihélium PrecesszióJános RohánNo ratings yet
- Mechanics of BodyDocument6 pagesMechanics of BodyLorde WagayenNo ratings yet
- (x) e ^ ^ (x +a) ^ −: dx T T a T i ℏ apϕ (p) e ϕ (p) e ϕ (p) i ℏ ap ϕ (p)Document4 pages(x) e ^ ^ (x +a) ^ −: dx T T a T i ℏ apϕ (p) e ϕ (p) e ϕ (p) i ℏ ap ϕ (p)neerajNo ratings yet
- XcosxdxDocument5 pagesXcosxdxWelyab PaulaNo ratings yet
- Central Force Motion IIDocument21 pagesCentral Force Motion IIIjaz TalibNo ratings yet
- Greens TheoremDocument9 pagesGreens TheoremAnonymous KIUgOYNo ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Connection ReportDocument20 pagesConnection Reportapi-570030183No ratings yet
- Capstone ReportDocument18 pagesCapstone Reportapi-570030183No ratings yet
- Thai m7Document10 pagesThai m7api-570030183No ratings yet
- Fluid Mechanics ProjectDocument15 pagesFluid Mechanics Projectapi-570030183No ratings yet
- Pyramid and PrismDocument2 pagesPyramid and PrismOktavianaalfNo ratings yet
- Measurement of Small DistancesDocument3 pagesMeasurement of Small DistancesJacie TupasNo ratings yet
- Torque Experiment Analyzes 2nd Equilibrium ConditionDocument11 pagesTorque Experiment Analyzes 2nd Equilibrium ConditioncsolutionNo ratings yet
- Länge Length: Ziehl-Abegg Se Heinz-Ziehl-Straße 74653 KünzelsauDocument2 pagesLänge Length: Ziehl-Abegg Se Heinz-Ziehl-Straße 74653 KünzelsauMARCUSNo ratings yet
- Class 11 States of Matter McqsDocument3 pagesClass 11 States of Matter Mcqstamil rajendiranNo ratings yet
- LEM VoltageTransducer CV3-200 sp6Document3 pagesLEM VoltageTransducer CV3-200 sp6Ezequiel OlivaresNo ratings yet
- HMWK 3 Problem SolutionsDocument6 pagesHMWK 3 Problem SolutionsMD Al-AminNo ratings yet
- P 11 April p2Document28 pagesP 11 April p2Harshit GoyalNo ratings yet
- Improvements To The NMR Method With Flowing Water at CMIDocument6 pagesImprovements To The NMR Method With Flowing Water at CMIGeorge AcostaNo ratings yet
- Brix Coefficient and CoffeeDocument29 pagesBrix Coefficient and CoffeeEden MolinaNo ratings yet
- Atwood AirCommand Air Conditioner Service ManualDocument27 pagesAtwood AirCommand Air Conditioner Service ManualYordis Daniel Rojas ChirinosNo ratings yet
- Is.3151.1982 Earthing TransformersDocument14 pagesIs.3151.1982 Earthing TransformersbonjurdikarNo ratings yet
- KLM Module 3 Electrical Fundamentals Part BDocument130 pagesKLM Module 3 Electrical Fundamentals Part BRajani ThapaNo ratings yet
- Energies: Fferent Weather ConditionsDocument18 pagesEnergies: Fferent Weather ConditionsAmanda PinheiroNo ratings yet
- B1 Rotation 1Document16 pagesB1 Rotation 1Johnny HongNo ratings yet
- KZN GR 12 Sept 2022 p2 Tech MathsDocument17 pagesKZN GR 12 Sept 2022 p2 Tech Mathsaneliswadubazana21No ratings yet
- Determination of Specific Heat Ratio and Error Analysis For EngineDocument8 pagesDetermination of Specific Heat Ratio and Error Analysis For EngineunnotedNo ratings yet
- 3.12 The Photoelectric Effect StudentDocument4 pages3.12 The Photoelectric Effect StudentHasan AslamNo ratings yet
- 1.LF1S - Load Flow ReportDocument3 pages1.LF1S - Load Flow ReportJosé Luis ColmenarezNo ratings yet
- Enthuse SRG Test-5Document25 pagesEnthuse SRG Test-5AdNo ratings yet
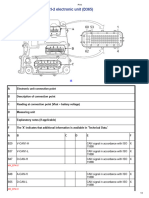
- CAN Connections of PMCI-2 Electronic Unit (D365)Document3 pagesCAN Connections of PMCI-2 Electronic Unit (D365)Oscar De la fuenteNo ratings yet
- 1 Product Data RITTAR Battery RA12-100Document2 pages1 Product Data RITTAR Battery RA12-100LuisNo ratings yet
- 9TH - Icse - Physics - Worksheet - Upthrust in Fluids, Archimedes' Principle and Floatation 2Document7 pages9TH - Icse - Physics - Worksheet - Upthrust in Fluids, Archimedes' Principle and Floatation 2manojboaNo ratings yet
- Physics Practical ManualDocument206 pagesPhysics Practical ManualASHIRAF HASHIMU ABUBAKAR100% (2)
- Biochemistry Assignment 1Document14 pagesBiochemistry Assignment 1Ananya DwivediNo ratings yet
- Calibration Certificate: Page 1 / 1Document1 pageCalibration Certificate: Page 1 / 1Eduard Gadzhiev0% (1)
- Kelompok 8 Perhitungan FormalinDocument4 pagesKelompok 8 Perhitungan FormalinJilan QfNo ratings yet
- EE-450L High Voltage Engineering: Experiment# 1 Study of High Voltage Engineering at UET Lahore & Its Safety MeasuresDocument14 pagesEE-450L High Voltage Engineering: Experiment# 1 Study of High Voltage Engineering at UET Lahore & Its Safety MeasuresFaixan ArshadNo ratings yet
- 100v10a 7in1 OLED Multifunction TesterDocument8 pages100v10a 7in1 OLED Multifunction Testerm16 wolNo ratings yet
- Tifr-2017 Physics Solved PaperDocument71 pagesTifr-2017 Physics Solved Paperparthjoshi2023tybscNo ratings yet