You might also like
- Articulated Body Pose Estimation: Unlocking Human Motion in Computer VisionFrom EverandArticulated Body Pose Estimation: Unlocking Human Motion in Computer VisionNo ratings yet
- Introduction to Mobile Robot ControlFrom EverandIntroduction to Mobile Robot ControlRating: 2.5 out of 5 stars2.5/5 (3)
- Analysis and Development of Advanced Robot DesignsDocument114 pagesAnalysis and Development of Advanced Robot DesignsMoshi Badalov50% (2)
- Servo Based 5 Axis Robotic Arm Project ReportDocument38 pagesServo Based 5 Axis Robotic Arm Project ReportRobo India100% (1)
- Learning Robotics Using Python - Sample ChapterDocument31 pagesLearning Robotics Using Python - Sample ChapterPackt Publishing100% (2)
- ManuscriptDocument22 pagesManuscriptTesterNo ratings yet
- 6-DOF PC-Based Robotic Arm (PC-ROBOARM) With Efficient Trajectory Planning and Speed ControlDocument8 pages6-DOF PC-Based Robotic Arm (PC-ROBOARM) With Efficient Trajectory Planning and Speed ControlSANTOS MANUEL BERNAL COLCHADONo ratings yet
- SDP ReportDocument8 pagesSDP ReportWaqas KhanNo ratings yet
- Tele-Operated Anthropomorphic Arm and Hand Design: Namal A. Senanayake, Khoo B. How, and Quah W. WaiDocument6 pagesTele-Operated Anthropomorphic Arm and Hand Design: Namal A. Senanayake, Khoo B. How, and Quah W. WaiEko Susilo HarjoNo ratings yet
- Humanoid Iitk - AautomiDocument4 pagesHumanoid Iitk - AautomiHimanshu VermaNo ratings yet
- Robotic Arm Thesis PDFDocument7 pagesRobotic Arm Thesis PDFNat Rice100% (2)
- Physics Rough DraftDocument23 pagesPhysics Rough DraftDinesh DammalapatiNo ratings yet
- Proposal of Robot ThesisDocument15 pagesProposal of Robot ThesisHus Forth CorrentyNo ratings yet
- Specification of RobotsDocument7 pagesSpecification of RobotsBilal MalikNo ratings yet
- Wirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojDocument4 pagesWirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojNaga Raju GNo ratings yet
- SynopsisDocument8 pagesSynopsisSahil RajputNo ratings yet
- RoboticsDocument4 pagesRoboticsNicomhar Agang TubioNo ratings yet
- Robotic Arm Given A Three Degree of FreedomDocument28 pagesRobotic Arm Given A Three Degree of FreedomEmmanuel OmaleNo ratings yet
- Vision Guided RoboticsDocument13 pagesVision Guided RoboticsVijay ShivakumarNo ratings yet
- Research Paper Robotic ArmDocument6 pagesResearch Paper Robotic Armaflbrozzi100% (3)
- Introduction To Robotics ArmDocument23 pagesIntroduction To Robotics ArmHritikNo ratings yet
- 63 May2020Document7 pages63 May2020AravindNo ratings yet
- Lab ManualDocument18 pagesLab Manualnijanthan.roboticsNo ratings yet
- A Novel Design of A Quadruped Robot For Research PurposesDocument13 pagesA Novel Design of A Quadruped Robot For Research Purposessushreet2754No ratings yet
- Design of A Biped RobotDocument6 pagesDesign of A Biped RobotSharan LuckNo ratings yet
- Min - 184 (1-5) Final (Ok)Document5 pagesMin - 184 (1-5) Final (Ok)Nirmal KushwahaNo ratings yet
- Literature Review Robotic ArmDocument7 pagesLiterature Review Robotic Armafmzeracmdvbfe100% (1)
- Developing Hardware Capability For Mobile Manipulation by Low-Cost Humanoid Robot (LOCH)Document13 pagesDeveloping Hardware Capability For Mobile Manipulation by Low-Cost Humanoid Robot (LOCH)Codrut MoldovanNo ratings yet
- PT Engleza (Trebuie Tradus Tot)Document10 pagesPT Engleza (Trebuie Tradus Tot)Spring ReportNo ratings yet
- 6DOF Robot ManipulatorDocument18 pages6DOF Robot ManipulatorKarthik DmNo ratings yet
- Design Analysis of A Remote Controlled P PDFDocument12 pagesDesign Analysis of A Remote Controlled P PDFVũ Mạnh CườngNo ratings yet
- Hyundai Wearable Robotics For Walking Assistance Offer A Full Spectrum of MobilityDocument11 pagesHyundai Wearable Robotics For Walking Assistance Offer A Full Spectrum of MobilityNelson TacyNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument21 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsjibiteshNo ratings yet
- 6-Dof Pc-Based Robotic Arm (Pc-Roboarm) With Efficient Trajectory Planning and Speed ControlDocument7 pages6-Dof Pc-Based Robotic Arm (Pc-Roboarm) With Efficient Trajectory Planning and Speed ControlNIKHIL SHINDENo ratings yet
- 680 Ra05Document7 pages680 Ra05mudassar3071No ratings yet
- Keyboard-Based Control and Simulation of 6-DOF Robotic Arm Using ROSDocument5 pagesKeyboard-Based Control and Simulation of 6-DOF Robotic Arm Using ROSNIKHIL SHINDENo ratings yet
- Balancing RobotDocument5 pagesBalancing RobotMilton MuñozNo ratings yet
- Labview Based Four Dof Robotic Arm: September 2016Document9 pagesLabview Based Four Dof Robotic Arm: September 2016Sony JuniantoNo ratings yet
- Vision Based Robot ControlDocument22 pagesVision Based Robot ControlPritam Borate100% (1)
- Expt. No.: ExperimentDocument5 pagesExpt. No.: ExperimentSwapnil DeyNo ratings yet
- AN044 Robotic ArmDocument9 pagesAN044 Robotic Armhussien amare100% (1)
- Robotic ArmDocument9 pagesRobotic ArmRohit KumarNo ratings yet
- Development of Intelligent Service Robotic System Based On Robot Technology MiddlewareDocument17 pagesDevelopment of Intelligent Service Robotic System Based On Robot Technology MiddlewareArun MNo ratings yet
- Lab ManualDocument9 pagesLab ManualSahil KokitkarNo ratings yet
- Raspberry Pi Based Dual-ARM Tele Robotic System With Live Video StreamingDocument5 pagesRaspberry Pi Based Dual-ARM Tele Robotic System With Live Video StreamingYusmi MaulanaNo ratings yet
- Robotics Technology Extended Background FinalDocument28 pagesRobotics Technology Extended Background FinalLovely Aurelio QuameNo ratings yet
- Home UChileHomeBreakers TDPDocument9 pagesHome UChileHomeBreakers TDPWilma PairoNo ratings yet
- Week 2 Learning JournalDocument16 pagesWeek 2 Learning Journallatomlala853No ratings yet
- Pick and Place Robotic Arm Literature ReviewDocument4 pagesPick and Place Robotic Arm Literature Reviewea9k5d7j100% (1)
- Tree ClimbingDocument37 pagesTree ClimbingJeevan Landge PatilNo ratings yet
- SR211122201836Document6 pagesSR211122201836Shailesh RanawareNo ratings yet
- Automi Research PaperDocument4 pagesAutomi Research PaperHimanshu vermaNo ratings yet
- Robotics (Sandhiya S)Document31 pagesRobotics (Sandhiya S)CS BCANo ratings yet
- 4 - Robot ProgrammingDocument10 pages4 - Robot Programmingkodasht.569005No ratings yet
- Unit - 1 - IntroductionDocument61 pagesUnit - 1 - IntroductionSatheesh KumarNo ratings yet
- Making of 3D Printed Humanoid Robot: A Project Presentation OnDocument34 pagesMaking of 3D Printed Humanoid Robot: A Project Presentation OnmanoramaNo ratings yet
- ECE - 3641 Project ProposalDocument11 pagesECE - 3641 Project Proposalananya RupaNo ratings yet
- Plagiarism Scan Report: Plagiarised UniqueDocument2 pagesPlagiarism Scan Report: Plagiarised UniqueHardik PatoliyaNo ratings yet
- dr2 - The DocsDocument14 pagesdr2 - The Docsapi-252247987No ratings yet
- Connection ReportDocument20 pagesConnection Reportapi-570030183No ratings yet
- Thai m7Document10 pagesThai m7api-570030183No ratings yet
- Statics ProjectDocument15 pagesStatics Projectapi-570030183No ratings yet
- Fluid Mechanics ProjectDocument15 pagesFluid Mechanics Projectapi-570030183No ratings yet
- Negative Sequence & Zero Sequence Reactance PDFDocument6 pagesNegative Sequence & Zero Sequence Reactance PDFviksoniNo ratings yet
- Media CommercialDocument28 pagesMedia CommercialLekule, Ibrahim HamisNo ratings yet
- DC MotorDocument27 pagesDC MotorAnonymous AFFiZn100% (2)
- Electric Vehicle Certification CourseDocument8 pagesElectric Vehicle Certification CourseDIYguruNo ratings yet
- Installation, Operation, and Maintenance Manual: Ultra V PumpDocument45 pagesInstallation, Operation, and Maintenance Manual: Ultra V PumpLuis Fernando Arias FlorezNo ratings yet
- Question Bank in AC Motors 1Document112 pagesQuestion Bank in AC Motors 1Albert Gerald Raymund100% (1)
- ELE2101 Mod 4 - Some Control System HardwareDocument54 pagesELE2101 Mod 4 - Some Control System HardwareRavneet kaurNo ratings yet
- EBM Papst - CPAP - MedicalDocument5 pagesEBM Papst - CPAP - MedicallouisNo ratings yet
- JoshuaWeeKhuiRen Lab1Document12 pagesJoshuaWeeKhuiRen Lab1Joshua WeeNo ratings yet
- Rain Sensing Automatic Car Wiper Using 555 TimerDocument6 pagesRain Sensing Automatic Car Wiper Using 555 TimerSunil MoreNo ratings yet
- Constructional Details:: 1. Explain The Construction Details of Synchronous MotorDocument28 pagesConstructional Details:: 1. Explain The Construction Details of Synchronous MotorrioNo ratings yet
- 4 The Manufacture of Spun Concrete Poles PDFDocument85 pages4 The Manufacture of Spun Concrete Poles PDFSuyenthan Sathish100% (1)
- MG11AH22Document93 pagesMG11AH22Dirga Setiawan AsharNo ratings yet
- Manual Inversor Omron 3g3jxDocument254 pagesManual Inversor Omron 3g3jxscribd_eliasNo ratings yet
- Chapter 2: Literature Review: Fig 2.1: A Typical Escalator in A BuildingDocument9 pagesChapter 2: Literature Review: Fig 2.1: A Typical Escalator in A BuildingLeon MpalsNo ratings yet
- Eps-Bli HYG: User ManualDocument75 pagesEps-Bli HYG: User ManualEwerton BianchiNo ratings yet
- Busch Instruction Manual SECO SV SD 1010 1040 C en 0870569132 0004Document24 pagesBusch Instruction Manual SECO SV SD 1010 1040 C en 0870569132 0004Melvic BinosNo ratings yet
- Mathematics 08 01269Document37 pagesMathematics 08 01269sanatikalaNo ratings yet
- Mechatronics Mid Exam and Final Question.Document26 pagesMechatronics Mid Exam and Final Question.yohanis johnNo ratings yet
- Hyundai 14 - 16 - 20 - 25BRJ-9Document8 pagesHyundai 14 - 16 - 20 - 25BRJ-9NayanajithNo ratings yet
- Chapter 2Document15 pagesChapter 2Aung ThikeNo ratings yet
- Electrical Troubleshooting ManualDocument52 pagesElectrical Troubleshooting ManualMohammed Shdiefat100% (1)
- Variodrive 2011Document41 pagesVariodrive 2011CCNo ratings yet
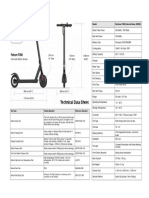
- Electisan - Falcon F350 - Technical Data SheetDocument1 pageElectisan - Falcon F350 - Technical Data Sheetf.niessgmx.de0% (1)
- F40 561 End Suction Pumps IOIDocument16 pagesF40 561 End Suction Pumps IOIAUX PRESUPUESTONo ratings yet
- 2020 Full Exam SolutionDocument6 pages2020 Full Exam SolutionAhmed AliNo ratings yet
- Mixer Flowmaker AMG AMD AFG Low PDFDocument28 pagesMixer Flowmaker AMG AMD AFG Low PDFpaulinhacoruNo ratings yet
- (LIT) LS90 LS110 LS160 BrochureDocument20 pages(LIT) LS90 LS110 LS160 BrochureJuan Carlos Reinhold Niembro SuchowitzkiNo ratings yet
- Machine Design Technical ReportDocument10 pagesMachine Design Technical ReportLouie Ludeña Villegas100% (1)
- Sebi Grade A Syllabus 33fafdcfDocument14 pagesSebi Grade A Syllabus 33fafdcfAejaz shaikhNo ratings yet