You might also like
- Aplicacion 61511Document22 pagesAplicacion 61511Edwin RTNo ratings yet
- GMInternational SIL 3 Definitive GuideDocument13 pagesGMInternational SIL 3 Definitive GuideGiovanni LerasNo ratings yet
- SIL Explained: Fluid Power Actuators and Control SystemsDocument8 pagesSIL Explained: Fluid Power Actuators and Control Systemsprihartono_diasNo ratings yet
- Functional Safety Sil Basics For Process Control GuideDocument4 pagesFunctional Safety Sil Basics For Process Control GuidemohdthasthakirNo ratings yet
- 2 Safety and Security Systems and Devices STUDY UNIT 2 Aa7fe43cDocument17 pages2 Safety and Security Systems and Devices STUDY UNIT 2 Aa7fe43cmpumeNo ratings yet
- Determining The Required Safety Integrity Level For Your Process PDFDocument8 pagesDetermining The Required Safety Integrity Level For Your Process PDFfitasmounirNo ratings yet
- Determine SILs Using HAZOPDocument10 pagesDetermine SILs Using HAZOPAlejandro GorostietaNo ratings yet
- Basics of SISDocument4 pagesBasics of SISJagath PrasangaNo ratings yet
- What is SIL? Understanding Safety Integrity LevelsDocument6 pagesWhat is SIL? Understanding Safety Integrity Levelsjamil voraNo ratings yet
- 21 Determine SIS and SIL Using HazOpsDocument11 pages21 Determine SIS and SIL Using HazOpsMarco Antonio Cruz MéndezNo ratings yet
- E - WP - Safety Availability Versus Process AvailabilityDocument13 pagesE - WP - Safety Availability Versus Process AvailabilityJorge D BalseroNo ratings yet
- Safety Integrity Level SIL PDFDocument4 pagesSafety Integrity Level SIL PDFEngr Hafiz Husnain BasraNo ratings yet
- SIL Exercises 1Document3 pagesSIL Exercises 1santosh mishraNo ratings yet
- Dr. Aa Process Control and Safety GroupDocument14 pagesDr. Aa Process Control and Safety Groupjcv235No ratings yet
- Functional Safety and Safety Integrity LevelsDocument6 pagesFunctional Safety and Safety Integrity Levelsmohsalehi1391No ratings yet
- Understanding Safety Integrity Level: Special Application SeriesDocument12 pagesUnderstanding Safety Integrity Level: Special Application SeriesEngr. AbdullahNo ratings yet
- Basic Functional Safety Engineering - Pratama DipayanaDocument52 pagesBasic Functional Safety Engineering - Pratama DipayanaTim Duncan100% (1)
- SIL LevelsDocument12 pagesSIL LevelsM Asad KhanNo ratings yet
- Sil PDFDocument67 pagesSil PDFpradeep1987coolNo ratings yet
- Determine SIL Levels Using HAZOP AnalysisDocument11 pagesDetermine SIL Levels Using HAZOP AnalysisBadrun Ahamd100% (1)
- How safe do I need to be? Understanding SIL and SISDocument4 pagesHow safe do I need to be? Understanding SIL and SISgandoupletaNo ratings yet
- Sis Training Course 1Document8 pagesSis Training Course 1santoshjshinde100% (1)
- Experiences Using Risk Graph & LOPADocument6 pagesExperiences Using Risk Graph & LOPASonco Suwa100% (2)
- ISA 84.01 GuideDocument24 pagesISA 84.01 GuideObinna Benedict ObiojiNo ratings yet
- Safety Instrumented 2018Document8 pagesSafety Instrumented 2018Himat KhimaniNo ratings yet
- SIL Determination and High Demand Mode: Table 1 IEC 61508 Ed 2 - Modes of OperationDocument8 pagesSIL Determination and High Demand Mode: Table 1 IEC 61508 Ed 2 - Modes of OperationDio NaufalNo ratings yet
- Safety Integrity Level (Basra)Document44 pagesSafety Integrity Level (Basra)Husnain BasraNo ratings yet
- Safety Instrumented SystemDocument9 pagesSafety Instrumented SystemAvina NigNo ratings yet
- Future Trends in Safety Instrumented Systems PDFDocument7 pagesFuture Trends in Safety Instrumented Systems PDFfitasmounirNo ratings yet
- Summary Seven Parts of IEC61508Document23 pagesSummary Seven Parts of IEC61508javoNo ratings yet
- Safety Integrity LevelDocument4 pagesSafety Integrity LevelHardik AcharyaNo ratings yet
- Safety Integrity LevelDocument5 pagesSafety Integrity Levelonafets100% (1)
- [ISA Transactions 2000-apr vol. 39 iss. 2] Angela E Summers - Viewpoint on ISA TR84.0.02 — simplified methods and fault tree analysis (2000) [10.1016_s0019-0578(00)00018-5] - libgen.liDocument7 pages[ISA Transactions 2000-apr vol. 39 iss. 2] Angela E Summers - Viewpoint on ISA TR84.0.02 — simplified methods and fault tree analysis (2000) [10.1016_s0019-0578(00)00018-5] - libgen.lijackrzysNo ratings yet
- Safety Integrity LevelsDocument21 pagesSafety Integrity Levelshwang2No ratings yet
- Methods of Determining Safety Integrity LevelDocument16 pagesMethods of Determining Safety Integrity LevelFrancisco ParedesNo ratings yet
- ESD Valve SILDocument8 pagesESD Valve SILmgkvprNo ratings yet
- Safety Integrity Level (SIL) : The "Logic" of Single Loop Logic SolversDocument1 pageSafety Integrity Level (SIL) : The "Logic" of Single Loop Logic SolversazrinoordinNo ratings yet
- Exida - SIF Verification Three-BarriersDocument23 pagesExida - SIF Verification Three-BarriersRifyan AlanaNo ratings yet
- SIS OverviewDocument50 pagesSIS OverviewAlex Acosta Lara100% (2)
- IEC61508 IEC61511 Presentation EDocument56 pagesIEC61508 IEC61511 Presentation ESteve Forster100% (3)
- Logic Solver For Tank Overfill ProtectionDocument14 pagesLogic Solver For Tank Overfill ProtectionPdjatmikoNo ratings yet
- Safety Integrity LevelsDocument6 pagesSafety Integrity LevelsJuan Carlos Sua SuaNo ratings yet
- 11 IntegrityDocument36 pages11 IntegrityMahesh DivakarNo ratings yet
- Essentials On Safety Instrumented SystemsDocument9 pagesEssentials On Safety Instrumented Systemstibi1000No ratings yet
- Functional Safety Questions & Answers GuideDocument5 pagesFunctional Safety Questions & Answers GuideJêmš NavikNo ratings yet
- BR Safetymatrix enDocument12 pagesBR Safetymatrix enHamidreza MoaddeliNo ratings yet
- Ipc2012 90580Document7 pagesIpc2012 90580Marcelo Varejão CasarinNo ratings yet
- Essentials of SisDocument9 pagesEssentials of SisNeil MenezesNo ratings yet
- Sil Explained - Valve World 2009 PDFDocument5 pagesSil Explained - Valve World 2009 PDFshaonaaNo ratings yet
- CT 1706 Logic Solver For Overpressure Protection PDFDocument14 pagesCT 1706 Logic Solver For Overpressure Protection PDFRolandNo ratings yet
- High Integrity Pressure Protection System SIL VerificationDocument22 pagesHigh Integrity Pressure Protection System SIL Verificationjose vasquezNo ratings yet
- Safety Instrumented SystemDocument7 pagesSafety Instrumented SystemMustafa Essam100% (2)
- SilDocument15 pagesSilMohamed Elsayed Hasan0% (1)
- Security Operations Center - Analyst Guide: SIEM Technology, Use Cases and PracticesFrom EverandSecurity Operations Center - Analyst Guide: SIEM Technology, Use Cases and PracticesRating: 4 out of 5 stars4/5 (1)
- Operationalizing Information Security: Putting the Top 10 SIEM Best Practices to WorkFrom EverandOperationalizing Information Security: Putting the Top 10 SIEM Best Practices to WorkNo ratings yet
- Aircraft System Safety: Assessments for Initial Airworthiness CertificationFrom EverandAircraft System Safety: Assessments for Initial Airworthiness CertificationNo ratings yet
- The Safety Critical Systems Handbook: A Straightforward Guide to Functional Safety: IEC 61508 (2010 Edition), IEC 61511 (2015 Edition) and Related GuidanceFrom EverandThe Safety Critical Systems Handbook: A Straightforward Guide to Functional Safety: IEC 61508 (2010 Edition), IEC 61511 (2015 Edition) and Related GuidanceRating: 5 out of 5 stars5/5 (1)
- The Safety Relief Valve Handbook: Design and Use of Process Safety Valves to ASME and International Codes and StandardsFrom EverandThe Safety Relief Valve Handbook: Design and Use of Process Safety Valves to ASME and International Codes and StandardsRating: 3.5 out of 5 stars3.5/5 (14)
- HARTDocument10 pagesHARTHalimi AyoubNo ratings yet
- Centrifugal Pump InfographicsDocument1 pageCentrifugal Pump InfographicsHalimi AyoubNo ratings yet
- Youssef Lkhadir Course Completion DateDocument1 pageYoussef Lkhadir Course Completion DateHalimi AyoubNo ratings yet
- Design-build and EPC contracts comparedDocument5 pagesDesign-build and EPC contracts comparedHalimi AyoubNo ratings yet
- Process Capability MetricsDocument13 pagesProcess Capability MetricsHalimi AyoubNo ratings yet
- Motor Starting PDF-1Document35 pagesMotor Starting PDF-1Halimi AyoubNo ratings yet
- KSA Construction Law BasicsDocument1 pageKSA Construction Law BasicsHalimi AyoubNo ratings yet
- DCS 3Document20 pagesDCS 3Halimi AyoubNo ratings yet
- Technical Note Plugged Impulse Line Detection Rosemount 3051s Advanced Diagnostics en Us 4232882Document10 pagesTechnical Note Plugged Impulse Line Detection Rosemount 3051s Advanced Diagnostics en Us 4232882Halimi AyoubNo ratings yet
- General Specifications: GS 33J60E10-01ENDocument5 pagesGeneral Specifications: GS 33J60E10-01ENHalimi AyoubNo ratings yet
- Spartan Controls Challenges of Burner Management System ApplicationsDocument12 pagesSpartan Controls Challenges of Burner Management System ApplicationsHalimi AyoubNo ratings yet
- Overview of ThermowellsDocument14 pagesOverview of ThermowellsShibu ThomasNo ratings yet
- MaintGuideUSA PDFDocument118 pagesMaintGuideUSA PDFfotopredicNo ratings yet
- General Specifications: GS 33J20C10-01ENDocument6 pagesGeneral Specifications: GS 33J20C10-01ENtwirpxNo ratings yet
- Mechanicalsealforpumps 150921014002 Lva1 App6892Document50 pagesMechanicalsealforpumps 150921014002 Lva1 App6892Buddy EkoNo ratings yet
- General Specifications: Integrated Production Control System CENTUM VP SystemDocument37 pagesGeneral Specifications: Integrated Production Control System CENTUM VP SystemHalimi AyoubNo ratings yet
- CAMS Outline Rev 1.2Document2 pagesCAMS Outline Rev 1.2Halimi AyoubNo ratings yet
- Sugar FactoryDocument18 pagesSugar FactoryHalimi AyoubNo ratings yet
- Alarm Management HandbookDocument26 pagesAlarm Management HandbookJoão Verissimo50% (2)
- CSR of DABUR Company..Document7 pagesCSR of DABUR Company..Rupesh kumar mishraNo ratings yet
- Vidya Mandir Public School Class 11 Computer Science String Assignment SolutionsDocument5 pagesVidya Mandir Public School Class 11 Computer Science String Assignment SolutionsArun SharmaNo ratings yet
- Data Table CarbonDocument2 pagesData Table Carbonyodaswarrior33% (15)
- MDP Module 2Document84 pagesMDP Module 2ADITYA RAJ CHOUDHARYNo ratings yet
- FINAL Please Be Informed That Your Termination From Office Is Not Intended To Be PersonalDocument9 pagesFINAL Please Be Informed That Your Termination From Office Is Not Intended To Be PersonalShareff ChamplainNo ratings yet
- EPFO Declaration FormDocument4 pagesEPFO Declaration FormSiddharth PednekarNo ratings yet
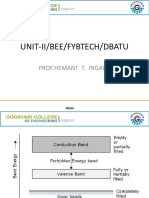
- Bee Unit-IiDocument98 pagesBee Unit-IiHemant Ingale100% (1)
- RD 5000 CalibracionDocument5 pagesRD 5000 Calibracionfran reyNo ratings yet
- Cryptography and Network Security": Sir Syed University of Engineering & TechnologyDocument5 pagesCryptography and Network Security": Sir Syed University of Engineering & TechnologySehar KhanNo ratings yet
- PackMan ReportDocument41 pagesPackMan ReportPrakash SamshiNo ratings yet
- G8 - Light& Heat and TemperatureDocument49 pagesG8 - Light& Heat and TemperatureJhen BonNo ratings yet
- Introduction To Globalization: Module DescriptionDocument3 pagesIntroduction To Globalization: Module DescriptionyowNo ratings yet
- MSC Dissertation Gantt ChartDocument6 pagesMSC Dissertation Gantt ChartProfessionalPaperWritingServiceUK100% (1)
- Oc Curve BasicsDocument25 pagesOc Curve BasicsRohit SoniNo ratings yet
- Products For Enhanced Oil RecoveryDocument4 pagesProducts For Enhanced Oil RecoverypmarteeneNo ratings yet
- Paul Ramesh Forensic Neuro Psychological InterviewDocument43 pagesPaul Ramesh Forensic Neuro Psychological Interviewnonam2100% (2)
- Function Apollo Amadeus: Sign In/OutDocument16 pagesFunction Apollo Amadeus: Sign In/OutMabs GaddNo ratings yet
- RV RVR en 0714 Edit PDFDocument6 pagesRV RVR en 0714 Edit PDFJacques FerreiraNo ratings yet
- Gen Math Module 6 Solving Exponential Equation and Inequalities - 112920 PDFDocument18 pagesGen Math Module 6 Solving Exponential Equation and Inequalities - 112920 PDFMGrace P. VergaraNo ratings yet
- Substitution in The Linguistics of Text and Grammatical ThoughtDocument17 pagesSubstitution in The Linguistics of Text and Grammatical ThoughtThảo HanahNo ratings yet
- English P5 TGDocument133 pagesEnglish P5 TGIradukunda PatrickNo ratings yet
- Synopsis MphilDocument10 pagesSynopsis MphilAyesha AhmadNo ratings yet
- KiaOptima Seccion 002Document7 pagesKiaOptima Seccion 002Luis Enrique PeñaNo ratings yet
- Abdul Jabbar (Mechanical Engineer) AGROFEED KSADocument4 pagesAbdul Jabbar (Mechanical Engineer) AGROFEED KSAftimum1No ratings yet
- Cycle1 Parta GettingtoknowyourstudentsDocument7 pagesCycle1 Parta Gettingtoknowyourstudentsapi-295073409No ratings yet
- Universiti Teknologi Mara Odl Test 1: Confidential 1 EM/ MAY 2020/MEM603Document4 pagesUniversiti Teknologi Mara Odl Test 1: Confidential 1 EM/ MAY 2020/MEM603000No ratings yet
- Part 1Document3 pagesPart 1Jester NavarquezNo ratings yet
- TOS - MathDocument4 pagesTOS - MathGeorge Ezar N. QuiriadoNo ratings yet
- MR Explorer: Magnetic Resonance Logging ServiceDocument7 pagesMR Explorer: Magnetic Resonance Logging ServiceRoberto DominguezNo ratings yet
- Word ShortcutsDocument3 pagesWord ShortcutsRaju BNo ratings yet































![[ISA Transactions 2000-apr vol. 39 iss. 2] Angela E Summers - Viewpoint on ISA TR84.0.02 — simplified methods and fault tree analysis (2000) [10.1016_s0019-0578(00)00018-5] - libgen.li](https://imgv2-2-f.scribdassets.com/img/document/719786063/149x198/04108399ac/1712178640?v=1)