You might also like
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Docslide - Us - Jehle and Renysolutions To Advanced Microeconomic Theory2ed 2000 PDFDocument12 pagesDocslide - Us - Jehle and Renysolutions To Advanced Microeconomic Theory2ed 2000 PDFIlona1988100% (1)
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Mathematical LogicDocument47 pagesMathematical LogicSaddam SevenmatikaNo ratings yet
- Matrix MultDocument6 pagesMatrix Multdaweley389No ratings yet
- 1 Iterative Methods For Linear Systems 2 Eigenvalues and EigenvectorsDocument2 pages1 Iterative Methods For Linear Systems 2 Eigenvalues and Eigenvectorsbohboh1212No ratings yet
- Polynomial and spline data fitting techniques for function approximationDocument33 pagesPolynomial and spline data fitting techniques for function approximationBachir El Fil100% (1)
- Induction and Recursion Quy nạp và Đệ quyDocument31 pagesInduction and Recursion Quy nạp và Đệ quyToan NgoNo ratings yet
- Theoretical Computer Science Cheat SheetDocument10 pagesTheoretical Computer Science Cheat SheetRosa GonzalezNo ratings yet
- Generating FunctionsDocument38 pagesGenerating FunctionscomputerstudentNo ratings yet
- 04-Induction and RecursionDocument32 pages04-Induction and Recursionvietpvhe186335No ratings yet
- QM1 3Document5 pagesQM1 3waratore1No ratings yet
- Induction and RecursionDocument34 pagesInduction and RecursionVĩ KhangNo ratings yet
- Ald Assignment 5 AMAN AGGARWAL (2018327) : Divide and ConquerDocument12 pagesAld Assignment 5 AMAN AGGARWAL (2018327) : Divide and ConquerRitvik GuptaNo ratings yet
- DynprogDocument30 pagesDynprogankit47No ratings yet
- Unit 2Document4 pagesUnit 2shekhawatms2411No ratings yet
- Matrix Chain MultiplicationDocument2 pagesMatrix Chain Multiplication张乔No ratings yet
- Erum Dost - Simulation of Models Exhibiting Runge's PhenomenonDocument13 pagesErum Dost - Simulation of Models Exhibiting Runge's Phenomenonuser77975No ratings yet
- Almost Unbiased Exponential Estimator For The Finite Population MeanDocument14 pagesAlmost Unbiased Exponential Estimator For The Finite Population MeanScience DirectNo ratings yet
- An Integer NumberDocument7 pagesAn Integer NumberRamanipriya MAHALINGAMNo ratings yet
- MIT18 781S12 Lec3 PDFDocument6 pagesMIT18 781S12 Lec3 PDFABhijithNo ratings yet
- An Integer NumberDocument7 pagesAn Integer NumberPrathamNo ratings yet
- Yogesh Meena (BCA-M15 4th SEM) CONM CCEDocument10 pagesYogesh Meena (BCA-M15 4th SEM) CONM CCEYogesh MeenaNo ratings yet
- The Durbin-Levinson Algorithm for AR ModelsDocument7 pagesThe Durbin-Levinson Algorithm for AR ModelsNguyễn Thành AnNo ratings yet
- Department of Mathematics Carnegie Mellon University 21-301 Combinatorics, Fall 2005: Test 1Document4 pagesDepartment of Mathematics Carnegie Mellon University 21-301 Combinatorics, Fall 2005: Test 1asudhasoNo ratings yet
- Lecture Notes in Discrete Mathematics Part 8Document13 pagesLecture Notes in Discrete Mathematics Part 8Moch DedyNo ratings yet
- Combes - An Introduction To Stochastic Approximation - 2013Document9 pagesCombes - An Introduction To Stochastic Approximation - 2013johanNo ratings yet
- Cryptography PDFDocument23 pagesCryptography PDFnicolasNo ratings yet
- 3rd DMA 2nd PartDocument113 pages3rd DMA 2nd PartDr. Ramu Kuchipudi Associate Professor (Contract)No ratings yet
- An Infinity Series Involving The Smarandache-Type FunctionDocument4 pagesAn Infinity Series Involving The Smarandache-Type FunctionMia AmaliaNo ratings yet
- 1 The Pad e TableDocument11 pages1 The Pad e Tableab cNo ratings yet
- Short Notice On (Exact) Trigonometric InterpolationDocument8 pagesShort Notice On (Exact) Trigonometric Interpolationandrej_liptajNo ratings yet
- Weatherwax - Conte - Solution - Manual Capitulo 2 y 3Document59 pagesWeatherwax - Conte - Solution - Manual Capitulo 2 y 3Jorge EstebanNo ratings yet
- EE5130 DSP Tutorial 2 Signals Sinusoids ConvolutionDocument3 pagesEE5130 DSP Tutorial 2 Signals Sinusoids ConvolutionSHUBHAM ANAND VERMA EE20M540No ratings yet
- Dynamic ProgrammingDocument7 pagesDynamic ProgrammingGlenn GibbsNo ratings yet
- IMC 2010 (Day 2)Document4 pagesIMC 2010 (Day 2)Liu ShanlanNo ratings yet
- The Moment Generating Function of The Binomial Distribution: Msc. Econ: Mathematical Statistics, 1996Document3 pagesThe Moment Generating Function of The Binomial Distribution: Msc. Econ: Mathematical Statistics, 1996Behin SamNo ratings yet
- Germain E. Randriambelosoa-Applied Mathematics E-Notes-2005Document8 pagesGermain E. Randriambelosoa-Applied Mathematics E-Notes-2005Narendra SinghNo ratings yet
- Tutorial 5 Solution - Topic 3 - PDEs - ans-Q1-Q4Document14 pagesTutorial 5 Solution - Topic 3 - PDEs - ans-Q1-Q4Ibrahim MusaNo ratings yet
- PCA-BASED NOISE REMOVAL TECHNIQUES USING TRANSFORMED IMAGESDocument8 pagesPCA-BASED NOISE REMOVAL TECHNIQUES USING TRANSFORMED IMAGESdinuveraNo ratings yet
- Applied Econometrics: Department of Economics Stern School of BusinessDocument27 pagesApplied Econometrics: Department of Economics Stern School of BusinesschatfieldlohrNo ratings yet
- Assignments 5 PDFDocument2 pagesAssignments 5 PDFاحمد السيدNo ratings yet
- Elementary Numerical Analysis: NPTEL Lectures OnDocument2 pagesElementary Numerical Analysis: NPTEL Lectures Onاحمد السيدNo ratings yet
- Neural Network Learning Dynamics Analysis: Articles You May Be Interested inDocument5 pagesNeural Network Learning Dynamics Analysis: Articles You May Be Interested inerick ramosNo ratings yet
- On The 83-TH Problem of F. SmarandacheDocument5 pagesOn The 83-TH Problem of F. SmarandacheMia AmaliaNo ratings yet
- Bijective Proof Problems: August 18, 2009Document70 pagesBijective Proof Problems: August 18, 2009nou channarith0% (1)
- New branch and bound algorithm for integer quadratic problemsDocument12 pagesNew branch and bound algorithm for integer quadratic problemsShah AzNo ratings yet
- On The K-Power Part Residue FunctionDocument4 pagesOn The K-Power Part Residue FunctionMia AmaliaNo ratings yet
- On The Irreducibility of A Truncated Binomial Expansion: P N J XDocument10 pagesOn The Irreducibility of A Truncated Binomial Expansion: P N J XRobert EriksenNo ratings yet
- Serija Iii: WWW - Math.hr/glasnikDocument20 pagesSerija Iii: WWW - Math.hr/glasnikvahidNo ratings yet
- Eli Maor, e The Story of A Number, Among ReferencesDocument10 pagesEli Maor, e The Story of A Number, Among ReferencesbdfbdfbfgbfNo ratings yet
- Li2016 PDFDocument12 pagesLi2016 PDFAnonymous l2fASkJbzkNo ratings yet
- Chapter One Discrete-Time Signals and Systems: Lecture #2Document18 pagesChapter One Discrete-Time Signals and Systems: Lecture #2DANIEL ABERANo ratings yet
- Reserch Paper 1Document9 pagesReserch Paper 1Lim AndrewNo ratings yet
- Dynamic Programming and Optimal Control: Third Edition Dimitri P. BertsekasDocument54 pagesDynamic Programming and Optimal Control: Third Edition Dimitri P. BertsekasRachit ShahNo ratings yet
- Math 3215 Intro. Probability & Statistics Summer '14 Homework 2Document4 pagesMath 3215 Intro. Probability & Statistics Summer '14 Homework 2Pei JingNo ratings yet
- MATH 437/ MATH 535: Applied Stochastic Processes/ Advanced Applied Stochastic ProcessesDocument7 pagesMATH 437/ MATH 535: Applied Stochastic Processes/ Advanced Applied Stochastic ProcessesKashif KhalidNo ratings yet
- Lege. FunctionsDocument10 pagesLege. Functionsfaizan bariNo ratings yet
- Solution 4Document3 pagesSolution 4Chen ShyanNo ratings yet
- MAST90083 2021 S2 Exam PaperDocument4 pagesMAST90083 2021 S2 Exam Paperxiaotianxue84No ratings yet
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970From EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNo ratings yet
- At 2223 C Ix At+s&m Paper 2Document25 pagesAt 2223 C Ix At+s&m Paper 2Lakshya SinghalNo ratings yet
- Class 9 SyllabusDocument1 pageClass 9 SyllabusLakshya SinghalNo ratings yet
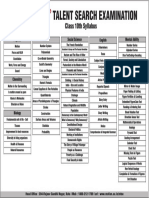
- MTSE Class 10th Syllabus and Exam Preparation GuideDocument1 pageMTSE Class 10th Syllabus and Exam Preparation GuideLakshya SinghalNo ratings yet
- Class XDocument8 pagesClass XLakshya SinghalNo ratings yet
- Grade 8, NSO Demo Test: Grade: 8 Total Marks: 60 Time: 1 HRDocument14 pagesGrade 8, NSO Demo Test: Grade: 8 Total Marks: 60 Time: 1 HRsanaNo ratings yet
- Kala Moon TheoryDocument15 pagesKala Moon TheoryLakshya SinghalNo ratings yet
- UndertakingDocument1 pageUndertakingLakshya SinghalNo ratings yet
- Tallentx Allen AcknowledgementDocument1 pageTallentx Allen AcknowledgementLakshya SinghalNo ratings yet
- (, ,) (An Autonomous Organization Under The Department of Higher Education, Ministry of Education, Government of India)Document15 pages(, ,) (An Autonomous Organization Under The Department of Higher Education, Ministry of Education, Government of India)Lakshya SinghalNo ratings yet
- Class 8 - Chapter 19Document2 pagesClass 8 - Chapter 19Lakshya SinghalNo ratings yet
- Copyright 220627 113243Document1 pageCopyright 220627 113243Lakshya SinghalNo ratings yet
- 229 393 1 PBDocument6 pages229 393 1 PBLakshya SinghalNo ratings yet
- Chap - 17 - Manufacturing Class - 8Document2 pagesChap - 17 - Manufacturing Class - 8Lakshya SinghalNo ratings yet
- Chap-24 The Police and The Courts Class-8Document2 pagesChap-24 The Police and The Courts Class-8Lakshya SinghalNo ratings yet
- Modulo 4Document26 pagesModulo 4cindy tatiana rodriguez marinNo ratings yet
- CongruenceAndSimilarity WEBDocument40 pagesCongruenceAndSimilarity WEBShaikat SenNo ratings yet
- Differential and Integral Calculus - N Piskunov PDFDocument895 pagesDifferential and Integral Calculus - N Piskunov PDFallstarsamelo87% (30)
- Lesson 2. Mathematics Curriculum in The Intermediate Grades ObjectiveDocument6 pagesLesson 2. Mathematics Curriculum in The Intermediate Grades ObjectiveAdriane TingzonNo ratings yet
- What Information Does The Ability Profiler Provide?Document2 pagesWhat Information Does The Ability Profiler Provide?Mohynnie UsmanNo ratings yet
- PROPERTIES OF RATIONAL NUMBERSDocument2 pagesPROPERTIES OF RATIONAL NUMBERSraneshNo ratings yet
- I Can Statements Math Grade 4Document3 pagesI Can Statements Math Grade 4api-241044660No ratings yet
- Chapter 7 Algebraaic ExpressionsDocument33 pagesChapter 7 Algebraaic Expressionsnaza9775100% (2)
- Root Finding Methods: Bisection Method Newton-Raphson Method Secant MethodDocument57 pagesRoot Finding Methods: Bisection Method Newton-Raphson Method Secant MethodhghgNo ratings yet
- Econometrics I: Chapter 3: Two Variable Regression Model: The Problem of EstimationDocument35 pagesEconometrics I: Chapter 3: Two Variable Regression Model: The Problem of EstimationawidyasNo ratings yet
- Life Is The Most Difficult Exam. Many People Fail Because They Try To Copy Others, Not Realizing That Everyone Has A Different Question Paper.Document3 pagesLife Is The Most Difficult Exam. Many People Fail Because They Try To Copy Others, Not Realizing That Everyone Has A Different Question Paper.Agyao Yam FaithNo ratings yet
- MathematicsDocument10 pagesMathematicsKerby MendozaNo ratings yet
- Curriculum Guide - Grade 9 (Mathematics)Document5 pagesCurriculum Guide - Grade 9 (Mathematics)Genciano CambalonNo ratings yet
- Suganthi Ifscom PDFDocument11 pagesSuganthi Ifscom PDFVimala SuganthiNo ratings yet
- Statistics (Student) 2023Document165 pagesStatistics (Student) 2023陳思樺No ratings yet
- Chapter 1 ExpressionsDocument11 pagesChapter 1 ExpressionsEiad HamamNo ratings yet
- pdf101 PDFDocument3 pagespdf101 PDFMohd RafiqNo ratings yet
- Statistics Lectures Slides, 2.4 Random VariablesDocument15 pagesStatistics Lectures Slides, 2.4 Random VariablesRamiz IqbalNo ratings yet
- Verification of Lami's Theorem: Experiment # 3Document6 pagesVerification of Lami's Theorem: Experiment # 3Vedansh GargNo ratings yet
- Binomial TheoremDocument14 pagesBinomial TheoremKrishNo ratings yet
- Vector Problems NotesDocument31 pagesVector Problems NotesSiti Sakinah BushariNo ratings yet
- Advanced Engineering MathDocument3 pagesAdvanced Engineering MathE5811 CALAQUE JEVAN USEP-BISLIGNo ratings yet
- The Fabric of Space-Time ExplainedDocument9 pagesThe Fabric of Space-Time ExplainedSoumyojit DeyNo ratings yet
- Laplace Transform Properties GuideDocument14 pagesLaplace Transform Properties GuideMohammed Al-OdatNo ratings yet
- Analysis of A Mathematical Problem-Solving Test On Speed and StudDocument15 pagesAnalysis of A Mathematical Problem-Solving Test On Speed and StudWiandi AfrizahNo ratings yet
- The Importance of Math in LifeDocument1 pageThe Importance of Math in LifeJomel De GuzmanNo ratings yet
- Hand Out of Mathematics (TKF 201) : Diferensial & IntegralDocument13 pagesHand Out of Mathematics (TKF 201) : Diferensial & IntegraldikyNo ratings yet
- c2Document28 pagesc2Harry LongNo ratings yet