You might also like
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Numerical Methods Machine Problem 1Document11 pagesNumerical Methods Machine Problem 1Maria Charlene Caraos TapiaNo ratings yet
- A1. Rank and Augmented Form of A MatrixDocument31 pagesA1. Rank and Augmented Form of A MatrixPushkarNo ratings yet
- Finite Element Structural Analysis On An Excel SpreadsheetDocument2 pagesFinite Element Structural Analysis On An Excel SpreadsheetdskymaximusNo ratings yet
- Springer Ebook Universitas TelkomDocument530 pagesSpringer Ebook Universitas TelkomFahrizal MaulanaNo ratings yet
- Numerical Analysis - MTH603 Handouts Lecture 10Document10 pagesNumerical Analysis - MTH603 Handouts Lecture 10Niaz Ahmed KhanNo ratings yet
- LU Factorization and Guess Elimination: by Zeinab MahdiDocument13 pagesLU Factorization and Guess Elimination: by Zeinab MahdiZeinab MahdiNo ratings yet
- BT11 02Document4 pagesBT11 02api-26125777No ratings yet
- 3) Unit 1 Lesson 2Document12 pages3) Unit 1 Lesson 2Rajkumar rawalNo ratings yet
- Example 1: A Certain Department Store Sales Three Different Types of Toys Boat, Car, andDocument15 pagesExample 1: A Certain Department Store Sales Three Different Types of Toys Boat, Car, andAkkamaNo ratings yet
- Chapter 3 LectuDocument11 pagesChapter 3 LectuTemesgen MollaNo ratings yet
- Lecture-06-Inverse of A Matrix and Matrix Inversion MethodDocument44 pagesLecture-06-Inverse of A Matrix and Matrix Inversion MethodSankara nathNo ratings yet
- Week 3 NotesDocument13 pagesWeek 3 NotesYuki AndyNo ratings yet
- Sec 6-4 PDFDocument17 pagesSec 6-4 PDFRizky Budi AntonoNo ratings yet
- Algebra JairoDocument20 pagesAlgebra JairoDiana SerranoNo ratings yet
- Project 1Document13 pagesProject 1Bilal HassanNo ratings yet
- RHW1Document7 pagesRHW1خالد عبدالجبارNo ratings yet
- Ero Matrix Group2Document22 pagesEro Matrix Group2izzuddinzamri98No ratings yet
- To Find The Matrix With The Help of Adjoint MatrixDocument5 pagesTo Find The Matrix With The Help of Adjoint MatrixFarid HossainNo ratings yet
- Elementary Row Operations and Rank of Matrix (Handout)Document8 pagesElementary Row Operations and Rank of Matrix (Handout)2050-Ramisa FarihaNo ratings yet
- 3.2 Row Reductions and Echelon FormDocument11 pages3.2 Row Reductions and Echelon FormJoelar OndaNo ratings yet
- Midterm 1: Eecs 16A Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali NiknejadDocument29 pagesMidterm 1: Eecs 16A Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali NiknejadJohn CrankstonNo ratings yet
- ES3SDocument6 pagesES3Shaoyu.lucio.wangNo ratings yet
- Assignment QuestionDocument3 pagesAssignment QuestionMariaNo ratings yet
- Linear Algebra AssignmentDocument11 pagesLinear Algebra AssignmentLim Yan HongNo ratings yet
- Mt210 Quiz 2 Sample 1 Surname, Name:: Question 1. 1.2 Row Reduction and Echelon FormDocument2 pagesMt210 Quiz 2 Sample 1 Surname, Name:: Question 1. 1.2 Row Reduction and Echelon FormahmedNo ratings yet
- Routh Stability Criterion SamplesDocument4 pagesRouth Stability Criterion SampleschikaNo ratings yet
- Module 1 Unit 3 Analytic GeometryDocument11 pagesModule 1 Unit 3 Analytic Geometrykorleon gNo ratings yet
- Lecture 4 - Linear Algebraic Equation - Updated PDFDocument58 pagesLecture 4 - Linear Algebraic Equation - Updated PDFHaziq KhairiNo ratings yet
- Lecture-03-Basics of DeterminantsDocument20 pagesLecture-03-Basics of DeterminantsSankara nathNo ratings yet
- Possible, and Determine Whether Row Interchanges Are NecessaryDocument78 pagesPossible, and Determine Whether Row Interchanges Are NecessaryNhân HồNo ratings yet
- Consistency of Linear System of EquationsDocument16 pagesConsistency of Linear System of EquationsSrikrishnaNo ratings yet
- Solution To TutorialDocument14 pagesSolution To TutorialSulaiman HabeebNo ratings yet
- Lecture 4.1: Solving Linear System by Inverse Matrix: Example1Document7 pagesLecture 4.1: Solving Linear System by Inverse Matrix: Example1YazeedNo ratings yet
- Matrix 1st ClassDocument6 pagesMatrix 1st ClassYeaser Arafat 2225300660No ratings yet
- Circuits Module 03Document19 pagesCircuits Module 03Glenn VirreyNo ratings yet
- Section1 5 PDFDocument4 pagesSection1 5 PDFegorNo ratings yet
- Zeros Below The Diagonal: Row I Column I I NDocument4 pagesZeros Below The Diagonal: Row I Column I I NরোদেলাদুপুরেরফুলNo ratings yet
- Z y X Z y X: SoluciónDocument4 pagesZ y X Z y X: SoluciónAlEjiita RamiirezNo ratings yet
- Taller 1 - Algebra LinealDocument7 pagesTaller 1 - Algebra LinealEmmanuel Ochoa MoraNo ratings yet
- Linear Algebra: Differential EquationsDocument13 pagesLinear Algebra: Differential EquationsadnanNo ratings yet
- Benevolence Jimu (N0189512L) - Stochastic Modelling (Cin4120) - Assignment 2Document10 pagesBenevolence Jimu (N0189512L) - Stochastic Modelling (Cin4120) - Assignment 2Edwin MudzamiriNo ratings yet
- As Lecture11Document2 pagesAs Lecture11mrtfkhangNo ratings yet
- Discrete Time Random Processes: 4.1 (A) UsingDocument16 pagesDiscrete Time Random Processes: 4.1 (A) UsingSudipta GhoshNo ratings yet
- CH 28Document12 pagesCH 28aNo ratings yet
- Unidad 2 Algebra Lineal Actividad 2 Representacion Matricial Blanca Ahirely Llovera HernandezDocument8 pagesUnidad 2 Algebra Lineal Actividad 2 Representacion Matricial Blanca Ahirely Llovera HernandezAlejandro HernandezNo ratings yet
- V 0, Then Either U 0 or V 0.: May Be ConfiscatedDocument6 pagesV 0, Then Either U 0 or V 0.: May Be ConfiscatedK BNo ratings yet
- Math 115 Lab 4 SolutionsDocument3 pagesMath 115 Lab 4 SolutionsDPNo ratings yet
- Vector Through An Angle of 60 Degrees in The Counterclockwise DirectionDocument11 pagesVector Through An Angle of 60 Degrees in The Counterclockwise DirectionAlfredo AraujoNo ratings yet
- Solutions of Homework 4Document11 pagesSolutions of Homework 4Архи́пNo ratings yet
- MA 106: Spring 2014: Tutorial Sheet 2Document5 pagesMA 106: Spring 2014: Tutorial Sheet 2Praveen SaharanNo ratings yet
- LAB 04 - Gauss Jordan and Inverse of Matrices in MATLABDocument5 pagesLAB 04 - Gauss Jordan and Inverse of Matrices in MATLABCan Raps100% (1)
- Kinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDocument6 pagesKinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDeepak BharadwajNo ratings yet
- Sample Calculus ProblemsDocument141 pagesSample Calculus ProblemsRedion XhepaNo ratings yet
- 2010 Revision Solution - StudentDocument12 pages2010 Revision Solution - StudentmosesNo ratings yet
- Actividad 3Document12 pagesActividad 3Rolando DazaNo ratings yet
- F18XD2 Solutions 5: Systems of Linear EquationsDocument5 pagesF18XD2 Solutions 5: Systems of Linear EquationsAsilahNo ratings yet
- Iitk Problem SetDocument8 pagesIitk Problem SetAnushka VijayNo ratings yet
- Week 7 Notes (A)Document7 pagesWeek 7 Notes (A)Yuki AndyNo ratings yet
- F HG I KJ: Group Discussion QuestionsDocument5 pagesF HG I KJ: Group Discussion QuestionsR Gomez GCNo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Jacobi and Gauss-Seidel IterationDocument8 pagesJacobi and Gauss-Seidel IterationPaco Gerte100% (1)
- Data Analysis With Python - Jupyter NotebookDocument10 pagesData Analysis With Python - Jupyter NotebookNitish RavuvariNo ratings yet
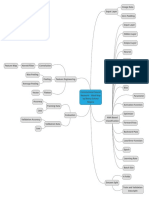
- CNN Mind Map by BSNDocument1 pageCNN Mind Map by BSNAlfandi FirnandoNo ratings yet
- Assignment No 2 (Assignment Problem)Document10 pagesAssignment No 2 (Assignment Problem)yadu nairNo ratings yet
- PHD Course Lectures: OptimizationDocument25 pagesPHD Course Lectures: OptimizationGafeer FableNo ratings yet
- Advanced Optimization Techniques PDFDocument2 pagesAdvanced Optimization Techniques PDFnagsanthosh3No ratings yet
- 9.5 The Simplex Method: Mixed Constraints: Dard Form. The Constraints For The Maximization Problems All InvolvedDocument11 pages9.5 The Simplex Method: Mixed Constraints: Dard Form. The Constraints For The Maximization Problems All InvolvedAnas Abdul-MalikNo ratings yet
- LUfbsub - Bas: Forward and Back Substitution in Visual BasicDocument2 pagesLUfbsub - Bas: Forward and Back Substitution in Visual BasicrodwellheadNo ratings yet
- NLP and ML ProjectDocument37 pagesNLP and ML ProjectAhhishek VaranasiNo ratings yet
- Factorización de PolinomiosDocument27 pagesFactorización de PolinomiosEdwin LlantoyNo ratings yet
- Automatic Sign Language RecognicationDocument9 pagesAutomatic Sign Language RecognicationManthan DoshiNo ratings yet
- 2.6 M Uller's Method: Chapter 2. Solutions of Equations of One VariableDocument9 pages2.6 M Uller's Method: Chapter 2. Solutions of Equations of One VariableXyzNo ratings yet
- Project 3 - CFDDocument2 pagesProject 3 - CFDSrivatsan SampathNo ratings yet
- NumMethods ExamDocument2 pagesNumMethods ExamManoj TripathiNo ratings yet
- Beam 24e Diam 0p25 Punch-000Document3 pagesBeam 24e Diam 0p25 Punch-000varma g s sNo ratings yet
- Artificial Neural Network Unsupervised Learning: U.S. Congress SynapseDocument2 pagesArtificial Neural Network Unsupervised Learning: U.S. Congress SynapseSonali KushwahNo ratings yet
- Docking With ArgusLabDocument24 pagesDocking With ArgusLabDesmond MacLeod Carey100% (1)
- Lagrange MultipliersDocument6 pagesLagrange Multiplierss_subbulakshmiNo ratings yet
- Competitive Networks - The Kohonen Self-Organising MapDocument6 pagesCompetitive Networks - The Kohonen Self-Organising Mapwert21No ratings yet
- 2.3 Newton Method and Its ExtensionDocument17 pages2.3 Newton Method and Its Extensionسعود يحيىNo ratings yet
- 0270 PDF C14 PDFDocument4 pages0270 PDF C14 PDFBao Tram NguyenNo ratings yet
- Different Variables: Laiba Ijaz - Operational ResearchDocument26 pagesDifferent Variables: Laiba Ijaz - Operational ResearchLaiba MughalNo ratings yet
- R-K MethodDocument7 pagesR-K Methodctg online63No ratings yet
- Blake Farman: B A N 0 1 2 N 1 NDocument11 pagesBlake Farman: B A N 0 1 2 N 1 NMatthew SimeonNo ratings yet
- Networks of Artificial Neurons, Single Layer PerceptronsDocument18 pagesNetworks of Artificial Neurons, Single Layer Perceptronsعيدروس قاسمNo ratings yet
- Optimal Solution Using MODI - MailDocument17 pagesOptimal Solution Using MODI - MailIshita RaiNo ratings yet
- PDE Project ReportDocument14 pagesPDE Project ReportKrishan ParwaniNo ratings yet
- Quicksort OptimizacijaDocument2 pagesQuicksort OptimizacijaFilip MeštrovićNo ratings yet