You might also like
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- A Method For Cycle Time Estimation of Semiconductor Manufacturing Toolsets With CorrelationsDocument11 pagesA Method For Cycle Time Estimation of Semiconductor Manufacturing Toolsets With CorrelationsDeepak JainNo ratings yet
- A Framework For Capacity Planning and Machine Configuration in Flexible Assembly SystemsDocument30 pagesA Framework For Capacity Planning and Machine Configuration in Flexible Assembly SystemsYan1203100% (1)
- Design and FabricationDocument31 pagesDesign and FabricationRajesh ShahNo ratings yet
- Assembly Systems and Assembly Line BalancingDocument37 pagesAssembly Systems and Assembly Line BalancingShaukat Ali ShahNo ratings yet
- Manufacturing Flow Line Systems: A Review of Models and Analytical ResultsDocument88 pagesManufacturing Flow Line Systems: A Review of Models and Analytical ResultsHairul HanizanNo ratings yet
- Assembly Systems and Assembly Line BalancingDocument37 pagesAssembly Systems and Assembly Line BalancingTafesse100% (1)
- Markov Model For Analyzing Sensitivity To Change in Machine Repair Reliability Using Its TransitionDocument12 pagesMarkov Model For Analyzing Sensitivity To Change in Machine Repair Reliability Using Its TransitionIJRASETPublicationsNo ratings yet
- Automated Generation of Assembly System-Design Solutions: Robert F. Webbink and S. Jack HuDocument8 pagesAutomated Generation of Assembly System-Design Solutions: Robert F. Webbink and S. Jack HuAseel JameelNo ratings yet
- Analysis of Autaomated Flow LinesDocument1 pageAnalysis of Autaomated Flow LinesSyedZameerNo ratings yet
- Pipeline Architecture: C. V. RamamoorthyDocument42 pagesPipeline Architecture: C. V. Ramamoorthykarunya.varmaNo ratings yet
- Detroit Type of AutomationDocument84 pagesDetroit Type of AutomationMunaf AcademyNo ratings yet
- Pipeline Architecture PDFDocument42 pagesPipeline Architecture PDFChuang James100% (1)
- Detroit Type of AutomationDocument73 pagesDetroit Type of Automationvinay846458% (12)
- Chapter OneDocument12 pagesChapter OneKelvin CeejayNo ratings yet
- A Comparison of The Push and Pull Production SysteDocument18 pagesA Comparison of The Push and Pull Production SystePratikJagtapNo ratings yet
- What Is Modal Analysis and Why Is It Necessary Caesar II Piping Modal Analysis Steps With PDFDocument8 pagesWhat Is Modal Analysis and Why Is It Necessary Caesar II Piping Modal Analysis Steps With PDFSaidFerdjallah100% (1)
- SPE 133545 Failure Prediction For Rod Pump Artificial Lift SystemsDocument8 pagesSPE 133545 Failure Prediction For Rod Pump Artificial Lift SystemsRudiStevenPardosiNo ratings yet
- Literature Review Flexible Manufacturing SystemDocument6 pagesLiterature Review Flexible Manufacturing Systemea793wsz100% (1)
- Ijaiem 2014 12 07 16Document6 pagesIjaiem 2014 12 07 16International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- How Factory Physics Helps SimulationDocument6 pagesHow Factory Physics Helps SimulationJerome KozlowskiNo ratings yet
- Analysis of A General Markovian Two-Stage Continuous-Flow Production System With A Finite BufferDocument15 pagesAnalysis of A General Markovian Two-Stage Continuous-Flow Production System With A Finite BuffermarcancaoNo ratings yet
- Stochastic Modeling of Manufacturing Systems PDFDocument364 pagesStochastic Modeling of Manufacturing Systems PDFVirgilio2009No ratings yet
- Reconfigurable Manufacturing SystemsDocument9 pagesReconfigurable Manufacturing SystemsBogdan CurtaNo ratings yet
- Modeling An Oil Drilling Rig Total Productive ...Document10 pagesModeling An Oil Drilling Rig Total Productive ...cpmrNo ratings yet
- Isca Unit 5Document23 pagesIsca Unit 5ßháìk Bäshèêr ßrNo ratings yet
- Modeling and Analysis of Tandem AGV Systems Using Generalized Stochastic Petri NetsDocument14 pagesModeling and Analysis of Tandem AGV Systems Using Generalized Stochastic Petri NetsKailash C BhosaleNo ratings yet
- Steam System-Dynamic ModellingDocument5 pagesSteam System-Dynamic ModellingChem.EnggNo ratings yet
- Akhavian 2014 Automation in ConstructionDocument13 pagesAkhavian 2014 Automation in ConstructionGeorge NunesNo ratings yet
- Lahrichi 2021Document26 pagesLahrichi 2021Youssef LahrichiNo ratings yet
- U1 03 Manufacturing CellsDocument2 pagesU1 03 Manufacturing CellsDeysi J. Barrera MariscalNo ratings yet
- Balancing Mixed Ergonomics - Model Assembly Line To Reduce Work Overload in A Multi-Level Production SystemDocument9 pagesBalancing Mixed Ergonomics - Model Assembly Line To Reduce Work Overload in A Multi-Level Production SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Operations Scheduling For An Advanced Flexible Manufacturing System With Multi-Fixturing PalletsDocument8 pagesOperations Scheduling For An Advanced Flexible Manufacturing System With Multi-Fixturing PalletsEduardo Jiménez ChavesNo ratings yet
- Final Synopsis Neetu GuptaDocument25 pagesFinal Synopsis Neetu Guptanarendrakum16No ratings yet
- Hardware/software Architecture For Adaptive Control SystemsDocument10 pagesHardware/software Architecture For Adaptive Control SystemsMirela VasiloniNo ratings yet
- An Assembly Line Is A Sequence of Workstations Linked To Each Other by A Conveyor or Moving BeltDocument6 pagesAn Assembly Line Is A Sequence of Workstations Linked To Each Other by A Conveyor or Moving BeltNGỌC MAI BẢONo ratings yet
- Tutorial Lecture1Document26 pagesTutorial Lecture1Mohamed MansourNo ratings yet
- A Genetic Algorithm For Scheduling FlexibleDocument20 pagesA Genetic Algorithm For Scheduling FlexibleNikkhil RathnakarNo ratings yet
- Simulation Approach To Model Queuing Problems: December 2011Document13 pagesSimulation Approach To Model Queuing Problems: December 2011Bini YamNo ratings yet
- Controller Design ThesisDocument4 pagesController Design Thesisaprilgriffinbeaumont100% (2)
- Informs: INFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations ResearchDocument19 pagesInforms: INFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations Researchadissa2103No ratings yet
- Configuration Selection For Reconfigurable Manufacturing Systems by Means of Characteristic State SpaceDocument10 pagesConfiguration Selection For Reconfigurable Manufacturing Systems by Means of Characteristic State SpaceDr alla talal yassinNo ratings yet
- Kim2001 PDFDocument11 pagesKim2001 PDFKailash BhosaleNo ratings yet
- EURO Surv PDFDocument28 pagesEURO Surv PDFKailash BhosaleNo ratings yet
- A Transfer Function Approach To Harmonic Filter DesignDocument15 pagesA Transfer Function Approach To Harmonic Filter DesignvgarudaNo ratings yet
- A New Method For Bottleneck DetectionDocument5 pagesA New Method For Bottleneck DetectionAmrik SinghNo ratings yet
- Electro HydraulicDocument20 pagesElectro HydraulicAnkit KumarNo ratings yet
- Optimization Design of Control Chart SystemsDocument10 pagesOptimization Design of Control Chart SystemsNilesh GopnarayanNo ratings yet
- Nodal Analysis GasDocument12 pagesNodal Analysis GasFebry Putra Wangsa JayaNo ratings yet
- Simulation Optimization of Part Input Sequence in A Flexible Manufacturing SystemDocument9 pagesSimulation Optimization of Part Input Sequence in A Flexible Manufacturing SystemJacinto Gomez EmbolettiNo ratings yet
- Transient Stability StudiesDocument12 pagesTransient Stability StudiesAbhijeet Kumar SinghNo ratings yet
- Analytical Tools For Power System RestorationDocument7 pagesAnalytical Tools For Power System Restorationeorea1341No ratings yet
- 2003-06 Optimization Using ABAQUS and TOSCADocument15 pages2003-06 Optimization Using ABAQUS and TOSCAlumasNo ratings yet
- Research ArticleDocument19 pagesResearch ArticlekimikononNo ratings yet
- Article MechanismMachineTheory Budinger PDFDocument17 pagesArticle MechanismMachineTheory Budinger PDFfei312chenNo ratings yet
- Criticality Analysis of Process SystemsDocument8 pagesCriticality Analysis of Process SystemschevroletNo ratings yet
- An Affordable Non-Linear Apc Technology For Distillation Columns Using First Principle ModelsDocument11 pagesAn Affordable Non-Linear Apc Technology For Distillation Columns Using First Principle Modelskirandevi1981No ratings yet
- Very Hungry Caterpillar Clip CardsDocument5 pagesVery Hungry Caterpillar Clip CardsARTGRAVETO ARTNo ratings yet
- (Schottel) Aspects of The Design Procedure For Propellers Providing Max Bollard PullDocument10 pages(Schottel) Aspects of The Design Procedure For Propellers Providing Max Bollard Pulldevu2chodankarNo ratings yet
- Unilever PakistanDocument26 pagesUnilever PakistanElie Mints100% (3)
- Macros and DirectiveDocument7 pagesMacros and DirectiveAbdul MoeedNo ratings yet
- New Microsoft Word DocumentDocument3 pagesNew Microsoft Word DocumentAditya ShanbhagNo ratings yet
- QF Jacket (Drafting & Cutting) - GAR620Document15 pagesQF Jacket (Drafting & Cutting) - GAR620abdulraheem18822No ratings yet
- CBC DrivingDocument74 pagesCBC DrivingElonah Jean ConstantinoNo ratings yet
- Student Research Project Science ReportDocument8 pagesStudent Research Project Science Reportapi-617553177No ratings yet
- Aircraft Flight Control SystemDocument25 pagesAircraft Flight Control Systemthilina jayasooriyaNo ratings yet
- MCFKTP G3 S2 SC Number Pattern PuzzlesDocument5 pagesMCFKTP G3 S2 SC Number Pattern PuzzlesEric GoNo ratings yet
- Sips 1328Document64 pagesSips 1328Jean Claude De AldánNo ratings yet
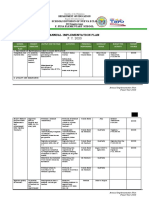
- AIP 2020 FINAL JuneDocument5 pagesAIP 2020 FINAL JuneVINA ARIETANo ratings yet
- 03 IGT-Influence of Codes Guidelines and Other Regulations On The Tunnel Design in AustriaDocument48 pages03 IGT-Influence of Codes Guidelines and Other Regulations On The Tunnel Design in AustriaSudarshan GadalkarNo ratings yet
- 3-A Y 3-B Brenda Franco DíazDocument4 pages3-A Y 3-B Brenda Franco DíazBRENDA FRANCO DIAZNo ratings yet
- Presentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022Document9 pagesPresentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022dakmts07No ratings yet
- PretestDocument8 pagesPretestAlmonte Aira LynNo ratings yet
- Chemical & Biological Depopulation (By Water Floridation and Food Additives or Preservatives) PDFDocument178 pagesChemical & Biological Depopulation (By Water Floridation and Food Additives or Preservatives) PDFsogunmola100% (2)
- Catalogue - Central Battery SystemDocument12 pagesCatalogue - Central Battery SystemarifzakirNo ratings yet
- Anykycaccount Com Product Payoneer Bank Account PDFDocument2 pagesAnykycaccount Com Product Payoneer Bank Account PDFAnykycaccountNo ratings yet
- Monster Hunter: World - Canteen IngredientsDocument5 pagesMonster Hunter: World - Canteen IngredientsSong HoeNo ratings yet
- Details Philippine Qualifications FrameworkDocument6 pagesDetails Philippine Qualifications FrameworkCeline Pascual-RamosNo ratings yet
- 한국항만 (영문)Document38 pages한국항만 (영문)hiyeonNo ratings yet
- Week 1 Familiarize The VmgoDocument10 pagesWeek 1 Familiarize The VmgoHizzel De CastroNo ratings yet
- Fellows (Antiques)Document90 pagesFellows (Antiques)messapos100% (1)
- STW 44 3 2 Model Course Leadership and Teamwork SecretariatDocument49 pagesSTW 44 3 2 Model Course Leadership and Teamwork Secretariatwaranchai83% (6)
- 3.0 Series and Parallel DC CircuitsDocument29 pages3.0 Series and Parallel DC CircuitsJinky Loyce RaymundoNo ratings yet
- X Lube Bushes PDFDocument8 pagesX Lube Bushes PDFDavid TurnerNo ratings yet
- Operator's ManualDocument110 pagesOperator's ManualAdam0% (1)
- Immobilization of Rhodococcus Rhodochrous BX2 (An AcetonitriledegradingDocument7 pagesImmobilization of Rhodococcus Rhodochrous BX2 (An AcetonitriledegradingSahar IrankhahNo ratings yet
- Random Questions From Various IIM InterviewsDocument4 pagesRandom Questions From Various IIM InterviewsPrachi GuptaNo ratings yet
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsFrom EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsNo ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZFrom EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZNo ratings yet
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Mastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionFrom EverandMastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Practical TCP/IP and Ethernet Networking for IndustryFrom EverandPractical TCP/IP and Ethernet Networking for IndustryRating: 4 out of 5 stars4/5 (2)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)