You might also like
- Basic Aircraft Control SystemsDocument29 pagesBasic Aircraft Control SystemsRyu WatanabeNo ratings yet
- Assignment Module 11Document11 pagesAssignment Module 11Syaifullah Saad100% (1)
- 29 Hydraulic SystemDocument10 pages29 Hydraulic SystemAlejandro FernandezNo ratings yet
- Airline Transport Pilot License Exam SyllabusDocument74 pagesAirline Transport Pilot License Exam SyllabusAjay50% (2)
- Aoa 777 Groundwork Hydraulics Transcript PDFDocument10 pagesAoa 777 Groundwork Hydraulics Transcript PDFberjarry5938100% (1)
- g200 Deicing PDFDocument2 pagesg200 Deicing PDFfarellano89No ratings yet
- Part 66 B1 - MODULE 4 3 SERVOMECHANISMSDocument26 pagesPart 66 B1 - MODULE 4 3 SERVOMECHANISMSyaman91100% (1)
- ConcordeDocument8 pagesConcordeVincent S Ryan100% (1)
- Erj 170-190 Mmel Faa Rev 9Document139 pagesErj 170-190 Mmel Faa Rev 9mh.hiliryNo ratings yet
- High Speed AerodynamicsDocument92 pagesHigh Speed AerodynamicsKunal Patel100% (1)
- Bleed Air System Schematic: Boeing 737Document8 pagesBleed Air System Schematic: Boeing 737Estevam Gomes de AzevedoNo ratings yet
- Fly by Wire and Fly by OpticsDocument7 pagesFly by Wire and Fly by OpticsvenkatsahulNo ratings yet
- Fuel SystemDocument24 pagesFuel SystemDipranjan GuptaNo ratings yet
- AC Knowedge 3 146questions +answersDocument20 pagesAC Knowedge 3 146questions +answersmoik ojooNo ratings yet
- Airframe Electrical FAA QuestionsDocument5 pagesAirframe Electrical FAA QuestionsJAYACHANDRANNo ratings yet
- FAA Hazardous Materials Carried by Passengers and CrewDocument16 pagesFAA Hazardous Materials Carried by Passengers and Crewabelardo219No ratings yet
- Aircraft Environmental Control Systems ExplainedDocument26 pagesAircraft Environmental Control Systems ExplainedAnonymous C9ZNFkrb6No ratings yet
- Automatic Flight ControlDocument334 pagesAutomatic Flight Controlxristophoros95% (22)
- Flight Control ActuationDocument8 pagesFlight Control ActuationhunganhngocNo ratings yet
- Hydroplaning of modern aircraft tires may occur at lower speedsDocument11 pagesHydroplaning of modern aircraft tires may occur at lower speedsCarlosKentNo ratings yet
- Low Reynolds Number Airfoil Design for MAVs with Adaptive WingsDocument11 pagesLow Reynolds Number Airfoil Design for MAVs with Adaptive WingsRanggi Sahmura100% (1)
- Pitot Static SystemDocument5 pagesPitot Static SystemKim VandelescaNo ratings yet
- Flight Control SystemsDocument2 pagesFlight Control SystemsAnkita MundaNo ratings yet
- Aircraft Control System AND Fly by Wire: Presented by Debajit Borah M.TECH (EEE), 1 SEMDocument16 pagesAircraft Control System AND Fly by Wire: Presented by Debajit Borah M.TECH (EEE), 1 SEMdebabazookaNo ratings yet
- Aircraft Marshalling TrainerDocument2 pagesAircraft Marshalling TrainerhennrynsNo ratings yet
- Basic Autopilot SystemsDocument4 pagesBasic Autopilot SystemsSonali Srivastava100% (1)
- EFISDocument9 pagesEFISsangeetamanishkumarNo ratings yet
- Manual Alpha Electro AircraftDocument84 pagesManual Alpha Electro Aircraftcarlos castro100% (1)
- En l410 Flight PerformanceDocument3 pagesEn l410 Flight Performancenagylaci11No ratings yet
- Q400 Oxygen 1Document8 pagesQ400 Oxygen 1MoshiurRahmanNo ratings yet
- FBW 777 PDFDocument15 pagesFBW 777 PDFMongoose82No ratings yet
- Helicopter Flight TheoryDocument21 pagesHelicopter Flight TheoryDasBrothers100% (1)
- Autopilot DesignDocument2 pagesAutopilot DesignMalu MsooNo ratings yet
- KODIAK 100 271 SpecificationsDocument12 pagesKODIAK 100 271 Specificationsraisul dianaNo ratings yet
- Boeing 777Document9 pagesBoeing 777Yasser ZubaidiNo ratings yet
- Airframe Fuel SystemsDocument67 pagesAirframe Fuel SystemsBrian100% (1)
- Afc4 - Landing GearDocument303 pagesAfc4 - Landing GearEjigayehu Lemma100% (2)
- Jet EngineDocument27 pagesJet Enginesetsection-b Ds UnivNo ratings yet
- Q400 Propeller PDFDocument10 pagesQ400 Propeller PDFGirish SreeneebusNo ratings yet
- 103 Easa Powerplant DemoDocument7 pages103 Easa Powerplant DemoAniruddha DaluiNo ratings yet
- Atr72 AfcsDocument29 pagesAtr72 AfcsEhsan Ul HaqueNo ratings yet
- CH 06 - Aircraft SystemsDocument40 pagesCH 06 - Aircraft SystemsFahmi Prayogi100% (1)
- Engineering Order #TC-108-7: InmediatoDocument27 pagesEngineering Order #TC-108-7: InmediatoJóse CedanoNo ratings yet
- AIRBUS A350-900 XWB TWIN-ENGINE LONG-HAUL AIRCRAFTDocument48 pagesAIRBUS A350-900 XWB TWIN-ENGINE LONG-HAUL AIRCRAFTShafril HakimiNo ratings yet
- Design and Analysis of Aircraft WingDocument7 pagesDesign and Analysis of Aircraft WingSai RahulNo ratings yet
- EASA Mod 4 BK 3 ServosDocument75 pagesEASA Mod 4 BK 3 ServosPriyanka ShresthaNo ratings yet
- ATR-Ice and Rain ProtectionDocument38 pagesATR-Ice and Rain ProtectionJavierNo ratings yet
- Hydro-Mechanical: Artificial Feel DevicesDocument2 pagesHydro-Mechanical: Artificial Feel DevicesMaan MirallesNo ratings yet
- Component Reliability Report - 2021-01Document90 pagesComponent Reliability Report - 2021-01Fred Sagrera100% (1)
- Aircraft Hydraulics System - DesDocument28 pagesAircraft Hydraulics System - DesDesiree Cena CapunoNo ratings yet
- Cessna Citation X-Engines PDFDocument27 pagesCessna Citation X-Engines PDFjuanNo ratings yet
- GettingTo Grips With CatI ICatIIIDocument22 pagesGettingTo Grips With CatI ICatIIIKhaled DwaikNo ratings yet
- TheAvionicsHandbook Cap 31 PDFDocument16 pagesTheAvionicsHandbook Cap 31 PDFfernandoabel01No ratings yet
- Aircraft Structures and System 1Document9 pagesAircraft Structures and System 1Zjian Wai100% (1)
- Flag This Store This Question: Report Problem With Question Send Your ReferenceDocument57 pagesFlag This Store This Question: Report Problem With Question Send Your ReferenceKarthik ReddyNo ratings yet
- Landing Gear & Braking SystemDocument34 pagesLanding Gear & Braking Systemversine100% (1)
- Part 135 Flight Planning From Mainland To Hawaii Etops or Non-Etops?Document14 pagesPart 135 Flight Planning From Mainland To Hawaii Etops or Non-Etops?ThejithaGunasekara100% (1)
- Stabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesFrom EverandStabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesNo ratings yet
- Interactionism and FeminismDocument13 pagesInteractionism and Feminismthilina jayasooriya100% (1)
- 'Woman' and Was First Used in Connection With The Issues of Equality and Woman'sDocument58 pages'Woman' and Was First Used in Connection With The Issues of Equality and Woman'sthilina jayasooriyaNo ratings yet
- Primary Flight ControlsDocument10 pagesPrimary Flight Controlsthilina jayasooriyaNo ratings yet
- Induced DragDocument2 pagesInduced Dragthilina jayasooriyaNo ratings yet
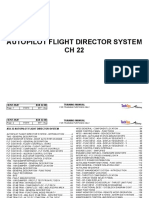
- Autopilot Flight Director System CH 22: Training Manual B767-3S2F Ata 22-00Document155 pagesAutopilot Flight Director System CH 22: Training Manual B767-3S2F Ata 22-00David Owen100% (1)
- Flight D. Cheat SheetDocument2 pagesFlight D. Cheat SheetIsaac PittmanNo ratings yet
- TO 1C-130H-2-27GS-00-1: General SystemDocument96 pagesTO 1C-130H-2-27GS-00-1: General SystemLuis Francisco Montenegro Garcia100% (1)
- Aircraft Flight Control SystemsDocument98 pagesAircraft Flight Control SystemsPanji Muhammad GumilangNo ratings yet
- DC9 - Control Surfaces OMDocument83 pagesDC9 - Control Surfaces OMzxcvbnm0078100% (1)
- 27 BeamerDocument226 pages27 BeamerashufriendluckyNo ratings yet
- King Air b200 - Ipc 27Document312 pagesKing Air b200 - Ipc 27Luciene OrecchioNo ratings yet
- PoF 11 ControlDocument46 pagesPoF 11 ControlglorfindelptNo ratings yet
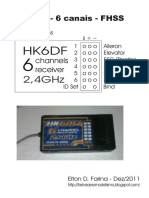
- 6 Channel 2.4GHz Receiver Pinout GuideDocument1 page6 Channel 2.4GHz Receiver Pinout GuidePool MamaniNo ratings yet
- 3 Theory of FlightDocument59 pages3 Theory of FlightTAMILARASU PNo ratings yet
- Bombardier Learjet-Flight Control Systems and AvionicsDocument88 pagesBombardier Learjet-Flight Control Systems and AvionicsJacob Jack Yosha100% (3)
- Secondary Flight ControlsDocument4 pagesSecondary Flight ControlsAnonymous OFTUeE6No ratings yet
- Control Theory & PracticeDocument10 pagesControl Theory & Practicevikram ruhilNo ratings yet
- B767 - Flight ControlsDocument120 pagesB767 - Flight ControlsTarik Benzineb100% (3)
- P180 Avanti-Flight ControlsDocument5 pagesP180 Avanti-Flight ControlsravNo ratings yet
- Aerostar Maintenance Manual ATA-27-Flight ControlsDocument72 pagesAerostar Maintenance Manual ATA-27-Flight ControlsNsafetyalwaysoff100% (1)
- B 737 NG Quiz Flight ControlDocument12 pagesB 737 NG Quiz Flight Controlluc madouNo ratings yet
- B737-Flight Controls Systems SummaryDocument24 pagesB737-Flight Controls Systems SummaryTrailblazer487100% (1)
- B767 Flight ControlsDocument9 pagesB767 Flight ControlsVishnu AnilkumarNo ratings yet
- Word File XM AfcsDocument14 pagesWord File XM AfcsAnik MiaNo ratings yet
- Flight ControlsDocument55 pagesFlight ControlsOganga JackNo ratings yet
- Tabs Are Aircraft Secondary Control SurfacesDocument5 pagesTabs Are Aircraft Secondary Control Surfacesmani kvrNo ratings yet
- Aero Modelling RC PlaneDocument6 pagesAero Modelling RC PlaneArvindrao17No ratings yet
- ATR Ata - 27 - Flight - ControlsDocument132 pagesATR Ata - 27 - Flight - ControlsJesús Montalvo FernándezNo ratings yet
- Flight Controls Manual ChapterDocument15 pagesFlight Controls Manual ChapterelrennyfulNo ratings yet
- L-39 120% Part TemplatesDocument1 pageL-39 120% Part TemplatesDavid busomNo ratings yet
- A319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual) - (FALTCHAP-27)Document82 pagesA319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual) - (FALTCHAP-27)A WongNo ratings yet
- A320 Systems Oral GuideDocument77 pagesA320 Systems Oral GuideAhmed Badi100% (4)
- A319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual)Document31 pagesA319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual)A WongNo ratings yet
- Control Surfaces ExplainedDocument6 pagesControl Surfaces ExplainedAugustė MačiulytėNo ratings yet